التجربة والخطأ
ما الجيد بما يكفي؟
لا توجد آلة مثالية. يبذل المهندسون قصارى جهدهم لتحقيق أقصى درجة ممكنة من الإتقان والدقة، ولكن ستكون هناك دائماً نسبة من الخطأ.
ما العوامل التي تحدد مقدار الخطأ المقبول؟
ابنِ *الروبوت المائل* هذا.
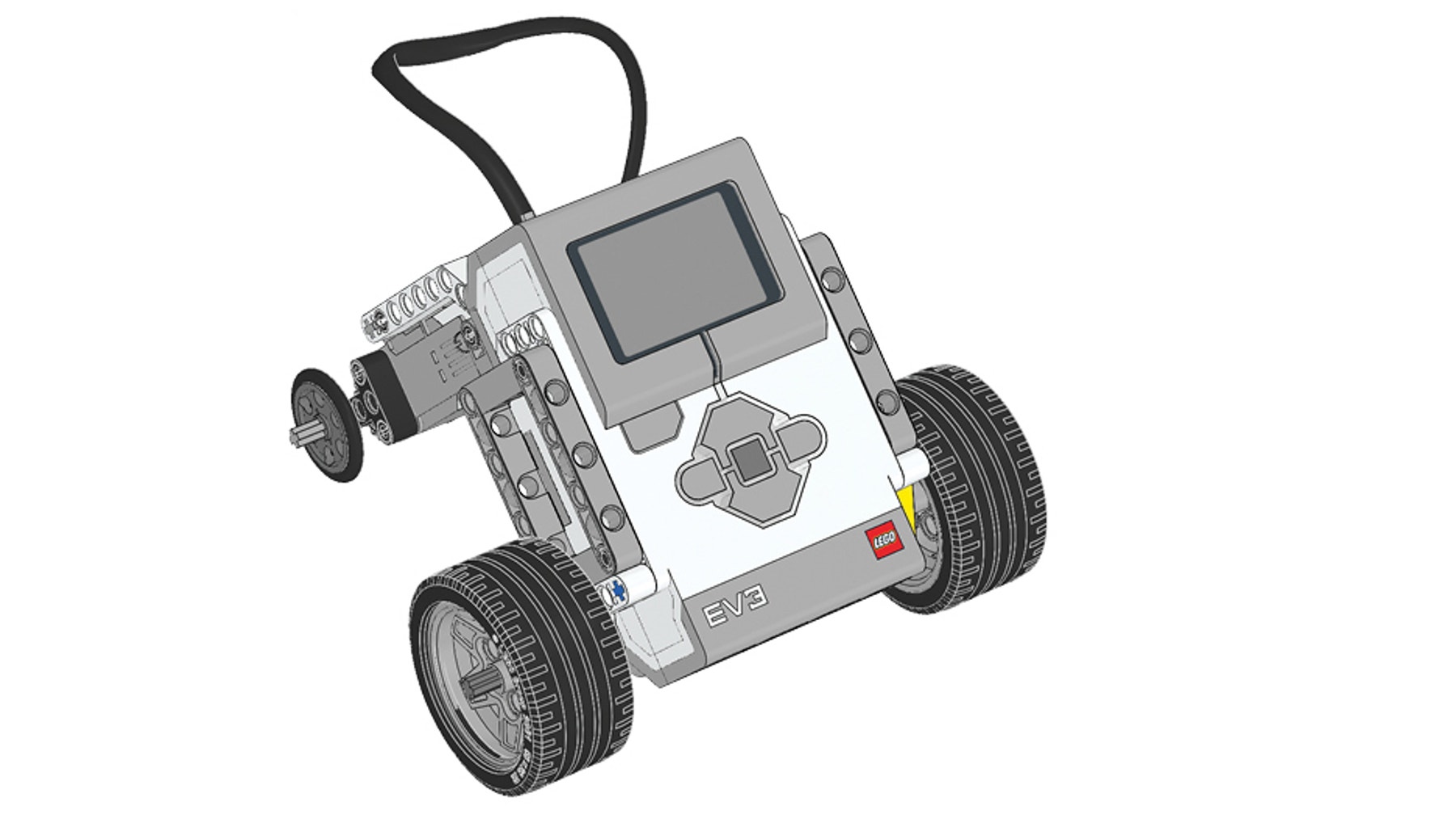
سيساعدك على التحقق من جوانب التصميم والبرمجة الخاصة به التي يمكن أن تسبب عدم الدقة.
اجرِ تشغيلاً تجريبيًا.


ضع النموذج على سطحٍ صلب ومستوٍ وحدّد موضع البدء الخاص به. ثم شغّل البرنامج وحدّد موضع انتهائه بمجرد توقفه عن الحركة.
هل يتحرك الروبوت المائل مسافة 100 سم؟ هل تعرض الشاشة دورات المحرك المحسوبة ودورات المحرك الفعلية والمسافة المقطوعة المحسوبة (بالسنتيمتر)؟
سجّل نتائجك.

سجّل رقم التجربة والمسافة المقطوعة المحسوبة والمسافة المقطوعة التي تم قياسها وذلك في جدول اختبار. تأكد من ترك مساحة كافية لإضافة أعمدة للمزيد من الحسابات.
اجرِ التجربة بالاستعانة بالنموذج والبرنامج الافتراضيين. كرِّر التجربة مع كل تعديل تجريه لتحدِّد أثره.
إجراء التجربة
ضع النصائح التالية في الاعتبار عند إجراء تجربتك:
- تعرض الشاشة دورات المحرك المحسوبة ودورات المحرك الفعلية والمسافة المقطوعة المحسوبة (بالسنتيمتر).
- قم بإجراء التجربة ثلاث مرات على الأقل واستخدم القيم المتوسطة لضمان استخدام أكثر النتائج دقة.
لخّص نتائجك.
استخدم متوسط المسافة المقطوعة التي تم قياسها مع كل تعديل من التعديلات التي أجريتها ثم احسب الخطأ لتحدّد أي نسخة كانت أكثر دقة.
ما التعديلات التي أجريتها على تصميم الروبوت وبرنامجه وكان لها الأثر الأكبر على دقته؟
كيف أبليت؟

ما الذي فعلته بشكلٍ جيد؟ هل يوجد أي شيء كان يمكنك القيام به على نحوٍ أفضل؟
رائع! الآن أنت تعرف كيفية تحسين دقة روبوت. هيا لننتقل إلى الدرس التالي.