Grib og slip
Vi har brug for nogle motoriserede redskaber.
Motoriserede redskaber kan fastgøres til robotter, så de kan udføre forskellige opgaver. Nu er det tid til at finde det rigtige redskab til jobbet!
Hvilke motoriserede redskaber vil dit chassis få brug for til at flytte rundt på genstande?
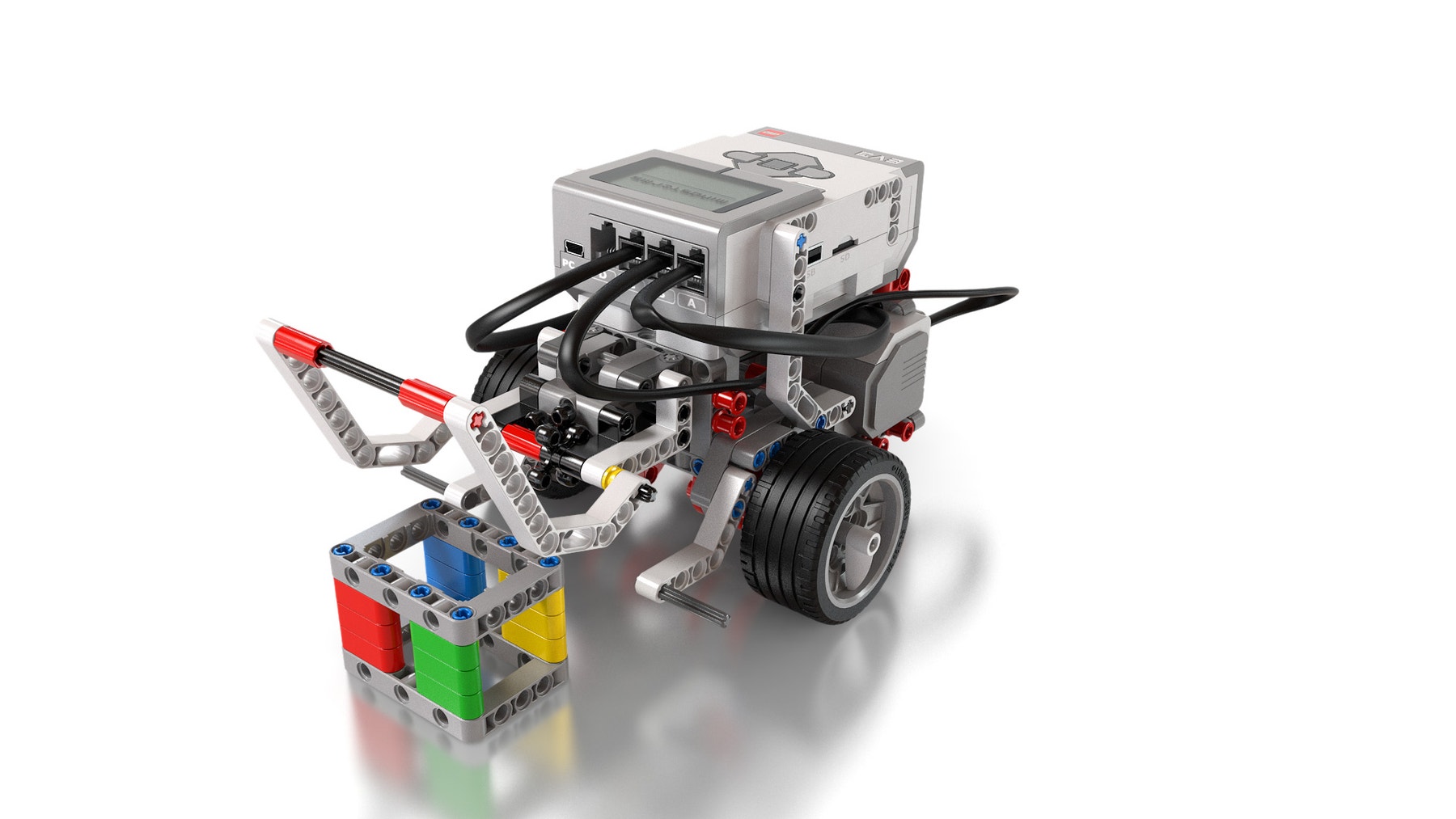
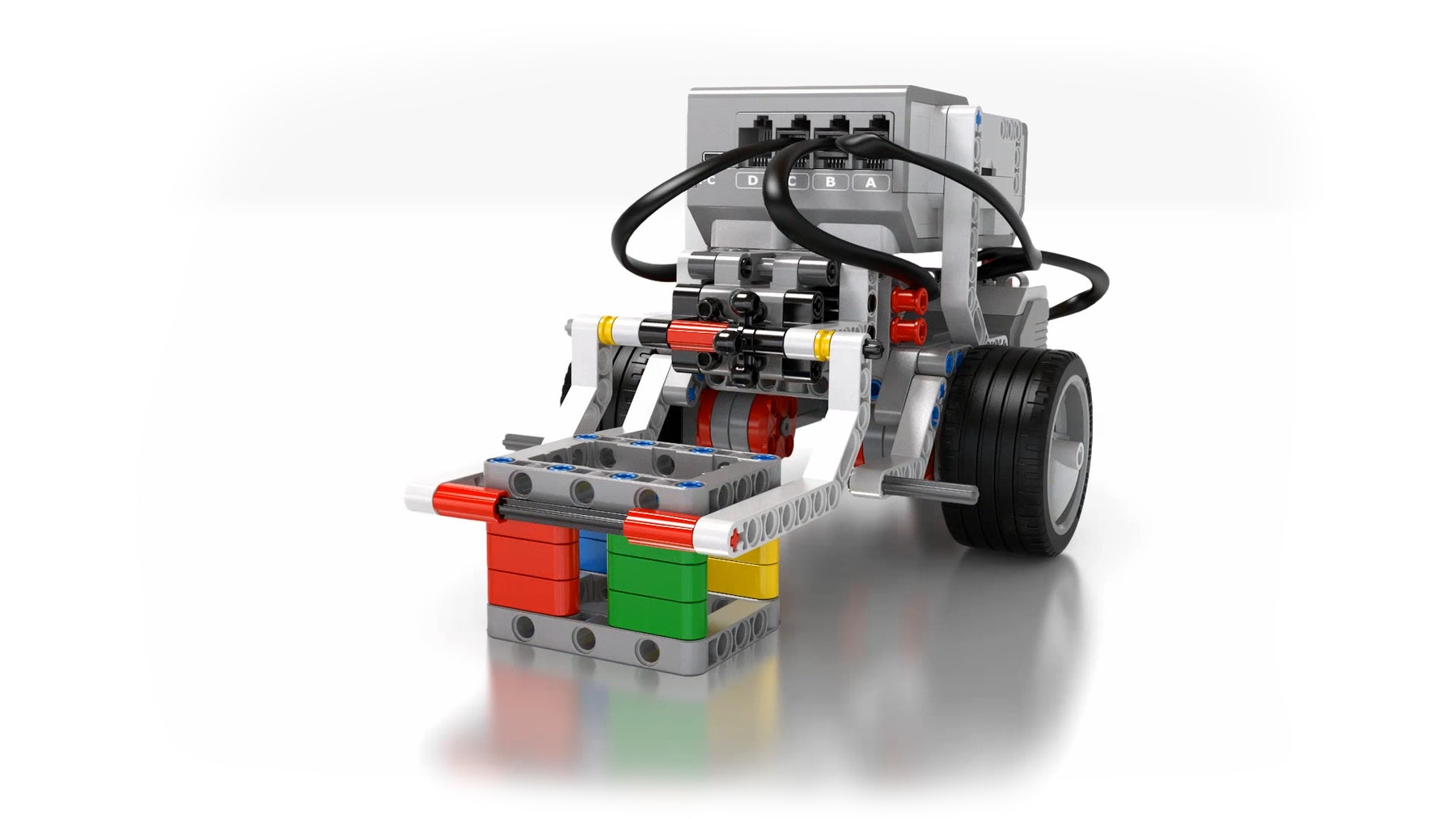
Byg modellen Kubus og disse udvidelser.
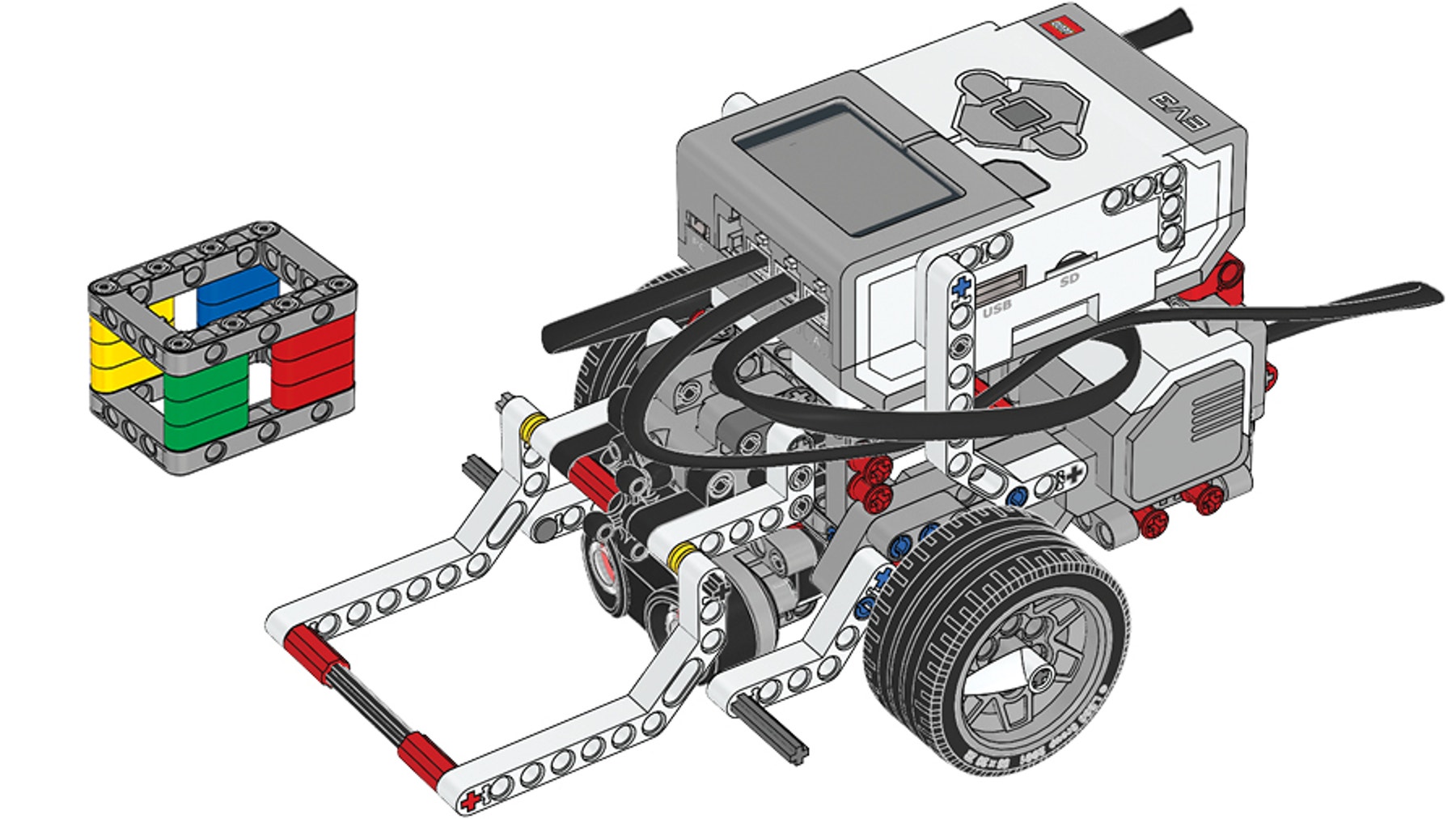
Vi skal bruge udvidelsen Mellemstor motor til at gribe fat i og slippe kubussen. Du skal også bruge ultralydssensor-udvidelsen fra den forrige lektion. Byg modellen Kubus, og byg derefter udvidelserne oven på chassiset.
Afprøv disse programmeringsstabler én ad gangen.

Hvad sker der? Prøv at placere kubussen i forskellige positioner.
Hvad er de vigtigste funktioner og begrænsninger i udvidelsen Mellemstor motor?
Din tur!
Brug blokke fra de programmeringsstabler, som allerede findes i programmeringsområdet, til at lave et program, der griber fat i kubussen, kører nogle omdrejninger frem, slipper kubussen og til sidst bakker for at køre tilbage til sin startposition.
Det er tid til en udfordring!

Programmér chassiset til at bruge ultralydssensoren til at stoppe i nærheden af kubussen og derefter sænke armen for at opsamle og returnere kubussen til sin startposition.
Hvordan gik det?
Hvad klarede du godt? Er der noget, du kunne have gjort bedre?
Du har styr på det her! Du kan gribe fat i og slippe genstande og flytte dem, hvorhen du vil.