Drej med sensor
Din mission er at programmere din robot til at uføre en drejning på stedet med en nøjagtig ved hjælp af gyrosensoren.
Trin for trin
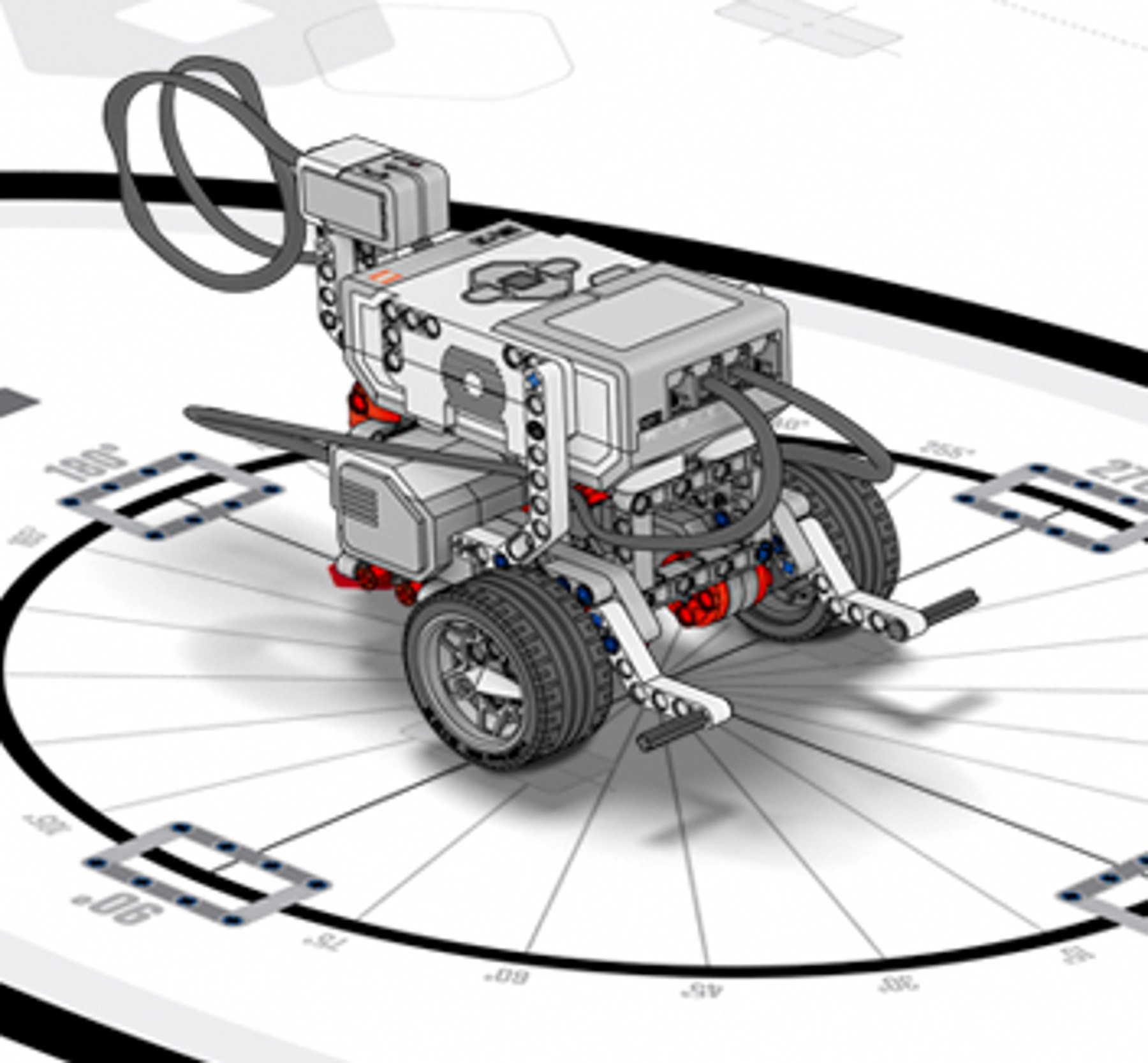
- Byg din robot.
- Lav dit program.
- Anbring robotten på position 2 på måtte 2, og kør programmet.
- Dokumentér dine resultater.
- Lær mere om brug af gyrosensoren til styring af robottens bevægelser.
Før du begynder på denne mission, kan det være en idé at gennemse disse Robot Educator demoer:
- Stop ved vinkel
- Løkke
I løbet af denne mission skal eleverne udforske forholdet mellem sensorinput og robottens adfærd. Chassisets omdrejninger skal styres af gyrosensoren.
Iagttag eleverne for at finde ud af, om de
Bruger korrekt terminologi
Genkender programmeringsblokkenes funktion
Finder gode måder at afprøve deres robots drejevinkel på, og
Forstår, hvilke faktorer der kan påvirke stoppræcisionen ved brug af en gyrosensor (sensortolerance, motorslør og omdrejningsbevægelse).
Tilslut
(5 minutter)
Drejning ved hjælp af et hjul er ikke ret nøjagtigt. Hvis du forsøger at dreje robotten i støvet eller på en glat overflade, opnår den muligvis ikke den rette vinkel. Gyrosensorens funktion er at hjælpe med at foretage mere nøjagtige bevægelser.
Din mission er at programmere din robot til at udføre en drejning på stedet med en nøjagtig vinkel ved hjælp af gyrosensoren.
Konstruer
(20 minutter)
Byg din robot
Klik på linkene herunder for at åbne byggevejledningerne. Byg derefter modellen, og vend tilbage til dette projekt for at fortsætte. Spring dette trin over, hvis modellen allerede er bygget.
VIGTIGT:
Hold gyrosensoren og EV3-klodsen i ro under tilslutning af kablet og under opstart af EV3-klodsen.
Lav dit program
Genskab det viste program, og download det derefter til din robot.

Opsummering af program
Start
Tankstyring – Strøm B[10], Strøm C[-10]
Vent – Gyrosensor – Sammenlign vinkel – Type[3] (Større end eller lig med), Grader[90]
Tankstyring – Fra
Fejlfinding
Vinklen skal justeres – typisk skal værdien være under 90 grader.
Teori
Ved brug af gyrosensoren svarer den omdrejningsværdi, der skrives i sensorblokken, til chassisets omdrejning. Sensorens nøjagtighed er +/- 3 grader.
Eventuelt slør i motoren og den forsinkelse, der opstår ved standsning af omdrejningsbevægelse, kan også påvirke nøjagtigheden.
Batteriets kraft, hjulenes størrelse, robottens friktion mod overfladen og afstanden mellem de to hjul er ikke længere faktorer, der kan påvirke nøjagtigheden af robottens omdrejning.
Overvej
(20 minutter)
Kør dit program, og observer.
Anbring robotten på startposition 2 på måtte 2, og kør programmet.
Dokumentér dine resultater
- Beskriv her, hvad hver af dine programmeringsblokke gjorde:
Min robot drejede på stedet, indtil gyrosensoren aflæste værdien 90 grader og stoppede. - Vurder robottens drejningsvinkel:
Min robot drejede ca. 90 grader. - Forklar forskellen mellem robottens drejning med og uden gyrosensoren:
Den drejning, der styres af gyrosensoren, afhænger af færre usikkerhedsfaktorer på robotten.
Overvej og tilpas
Lav programmet om, så robotten foretager følgende drejninger på stedet:
- 45 grader med uret
- 180 grader med uret
- 360 grader med uret, efterfulgt af en drejning på stedet mod uret på 360 grader
Hvor meget drejede robotten, sammenlignet med hvad programmet bad den om?
Den drejede typisk længere på grund af omdrejningsbevægelsen.
Opgave
Drej robotten med uret 45 grader.

Løsning - Opsummering af program
Start
Tankstyring – Strøm B[10], Strøm C[-10]
Vent – Gyrosensor – Sammenlign vinkel – Type[3] (Større end eller lig med), Grader[45]
Tankstyring – Fra
Fejlfinding
Vinklen skal justeres – typisk skal værdien være under 45 grader.
Opgave
Drej robotten med uret 180 grader.

Løsning - Opsummering af program
Start
Tankstyring – Strøm B[10], Strøm C[-10]
Vent – Gyrosensor – Sammenlign vinkel – Type[3] (Større end eller lig med), Grader[180]
Tankstyring – Fra
Fejlfinding
Vinklen skal justeres – typisk skal værdien være under 180 grader.
Opgave
Drej robotten 360 grader med uret, efterfulgt af en drejning på stedet mod uret på 360 grader.

Løsning - Opsummering af program
Start
Tankstyring – Strøm B[10], Strøm C[-10]
Vent – Gyrosensor – Sammenlign vinkel – Type[3] (Større end eller lig med), Grader[360]
Tankstyring – Fra
Vent – Sekunder[2]
Tankstyring – Strøm B[10], Strøm C[-10]
Vent – Gyrosensor – Sammenlign vinkel – Type[5] (Mindre end eller lig med), Grader[0]
Tankstyring – Fra
Fortsæt
(15 minutter)
Fortsæt udforskningen
Lav et nyt program med en løkke for at få robotten til at køre i en firkant.
Når du er klar, skal du afprøve dit program på startposition 4 på læringsmåtte 1.

Løsning - Opsummering af program
Start
Løkke – Optælling[4]
Bevægelsesstyring – Grader[682], Strøm[30]
Vent – Tid[1 sek.
Tankstyring – Til, Strøm B[10], Strøm C[-10]
Vent – Gyrosensor – Skift vinkel – Retning[0] (Øg), Grader[85]
Tankstyring – Fra
Vent – Tid[1 sek.]
Fejlfinding
Vinklen skal justeres – typisk skal værdien være under 90 grader.
Forklar her, hvad en løkke kan bruges til:
Jeg kan bruge løkkestrukturen til at gentage handlinger.
Optional
1.Lav et nyt program, som får robotten til at køre i en trekant. Når du er klar, skal du afprøve dit program på startposition 4 på måtte 1.
2.Programmér din robot til køre i andre figurer.

Du er nu klar til at bruge gyrosensoren til at foretage drejninger. Godt gået!
Hjælp til lærere
Læringsmål:
Natur og teknik:
• mønstre
• årsag og virkning: Mekanisme og forklaring
Matematik:
• Løsning af problemer fra virkelighedens verden og matematiske problemer med måling af vinkel, areal, overfladeareal og rumfang
• Identifikation og formidling af regelmæssighed i gentagen argumentation.
Robotteknologi:
• bevægelsesstyring af robotten ved hjælp af gyrosensoren
• forståelse af forskellen mellem almindelig outputprogrammering og sensorbaseret programmering
• fordele og begrænsninger ved sensorer
LEGO MINDSTORMS EV3-basissæt
LEGO® MINDSTORMS Education EV3 Lab eller EV3 Programming
Sættet EV3 Space Challenge




