Forgrening
Bruge forgrening-blokken til at foretage dynamiske sensorbaserede beslutninger.
Afprøv
Genskab det viste program, download det, og kør det for at afprøve det.
Tip
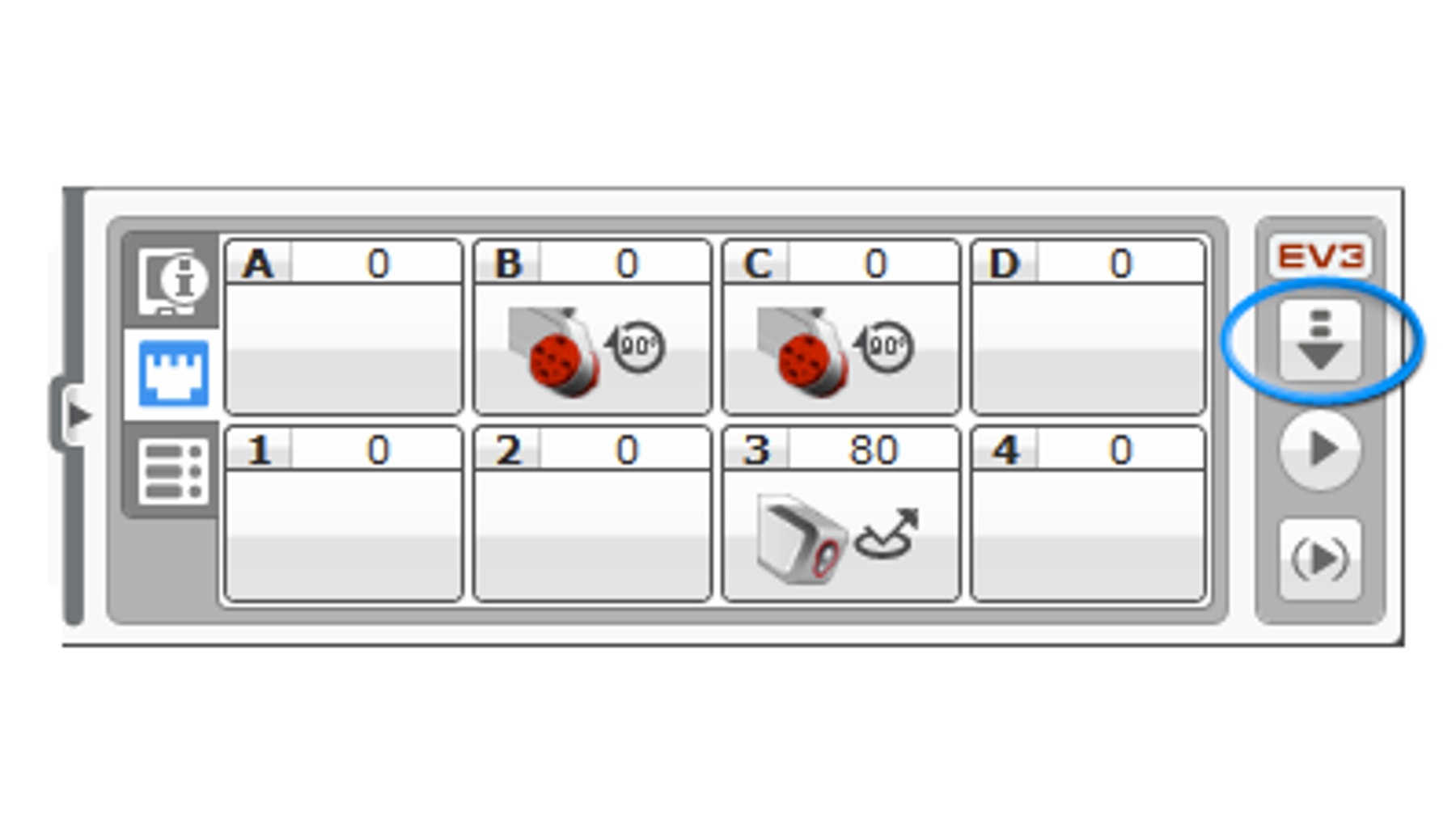
Appen 'Port View' på EV3-klodsen kan også bruges til visning af sensoraflæsninger i realtid.
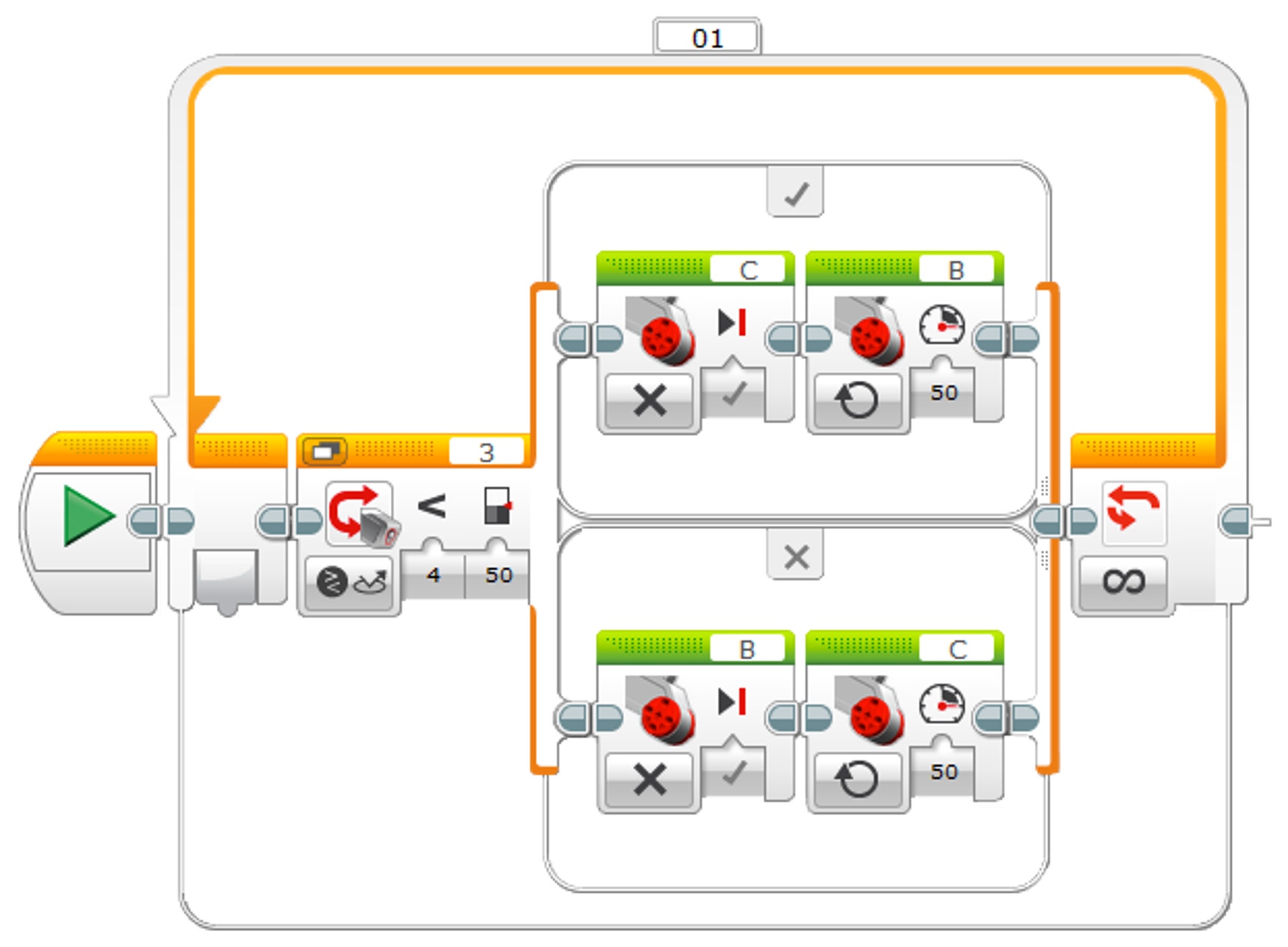
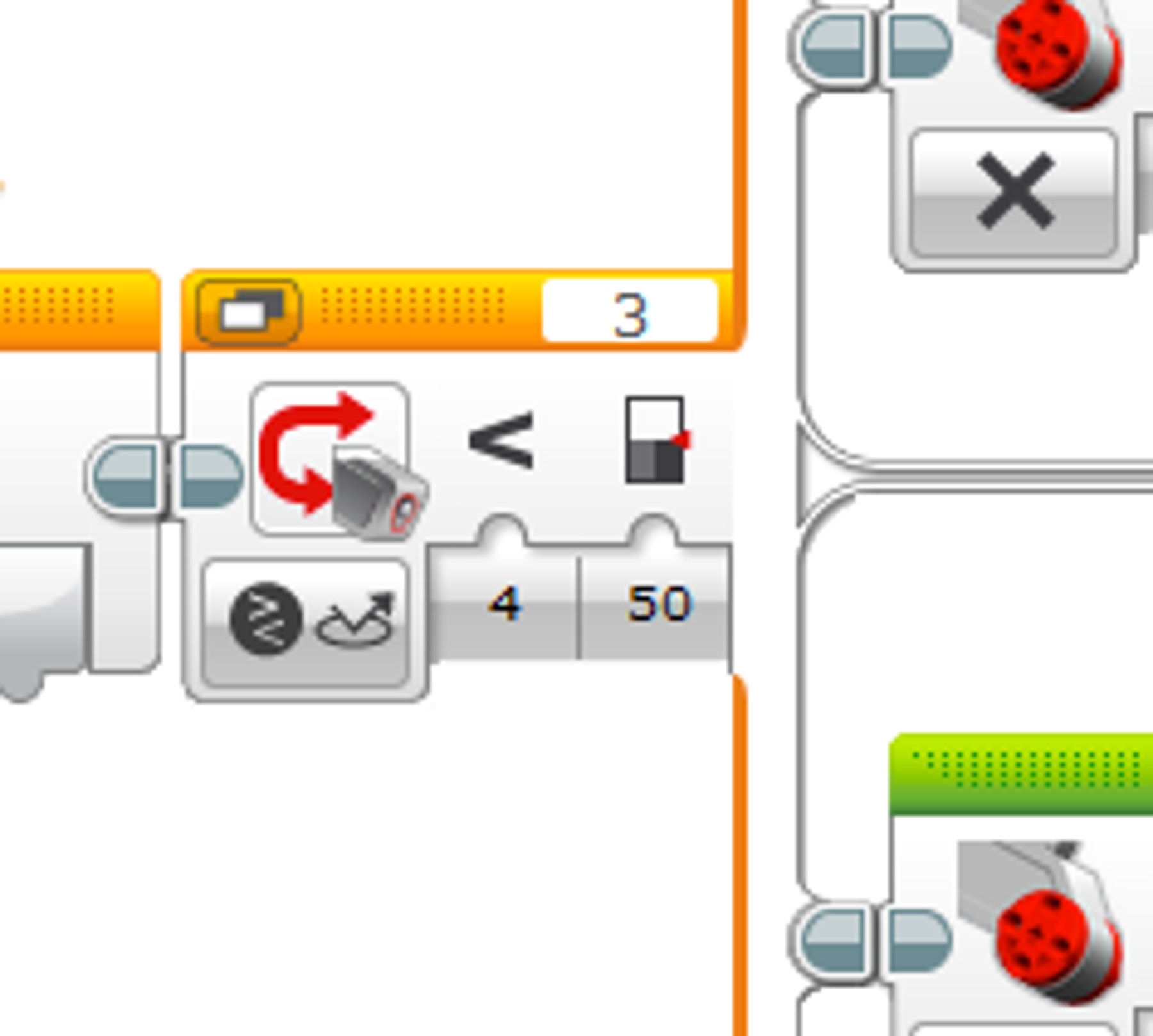
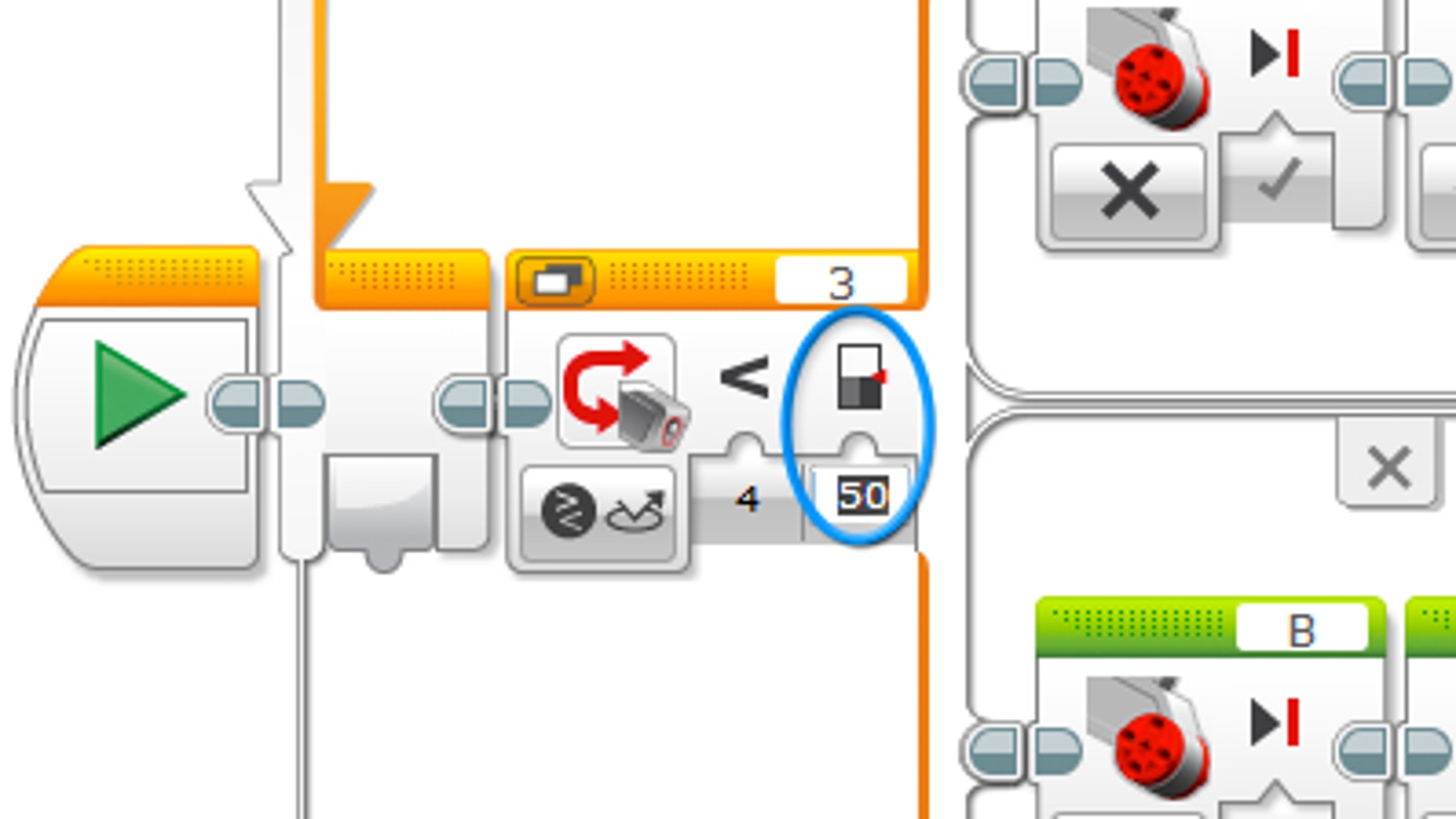
Opsummering af program
Start
Løkke – Ubegrænset
Forgrening – Farvesensor – Sammenlign intensitet af reflekteret lys [Mindre end, 50]
Hvis Sandt: Stor motor C – Fra
Hvis Sandt: Stor motor B – Til
Hvis Falsk: Stor motor B – Fra
Hvis Falsk: Stor motor C – Til
Indstilling af tærskel
På de følgende sider skal du måle farvesensorens lyse og mørke niveauer og derefter bruge disse til at finde gennemsnittet, som kommer til at være farvesensorens lysfølsomhed.
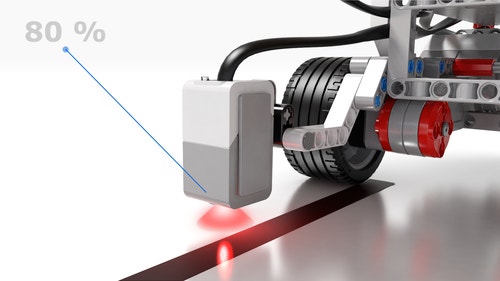
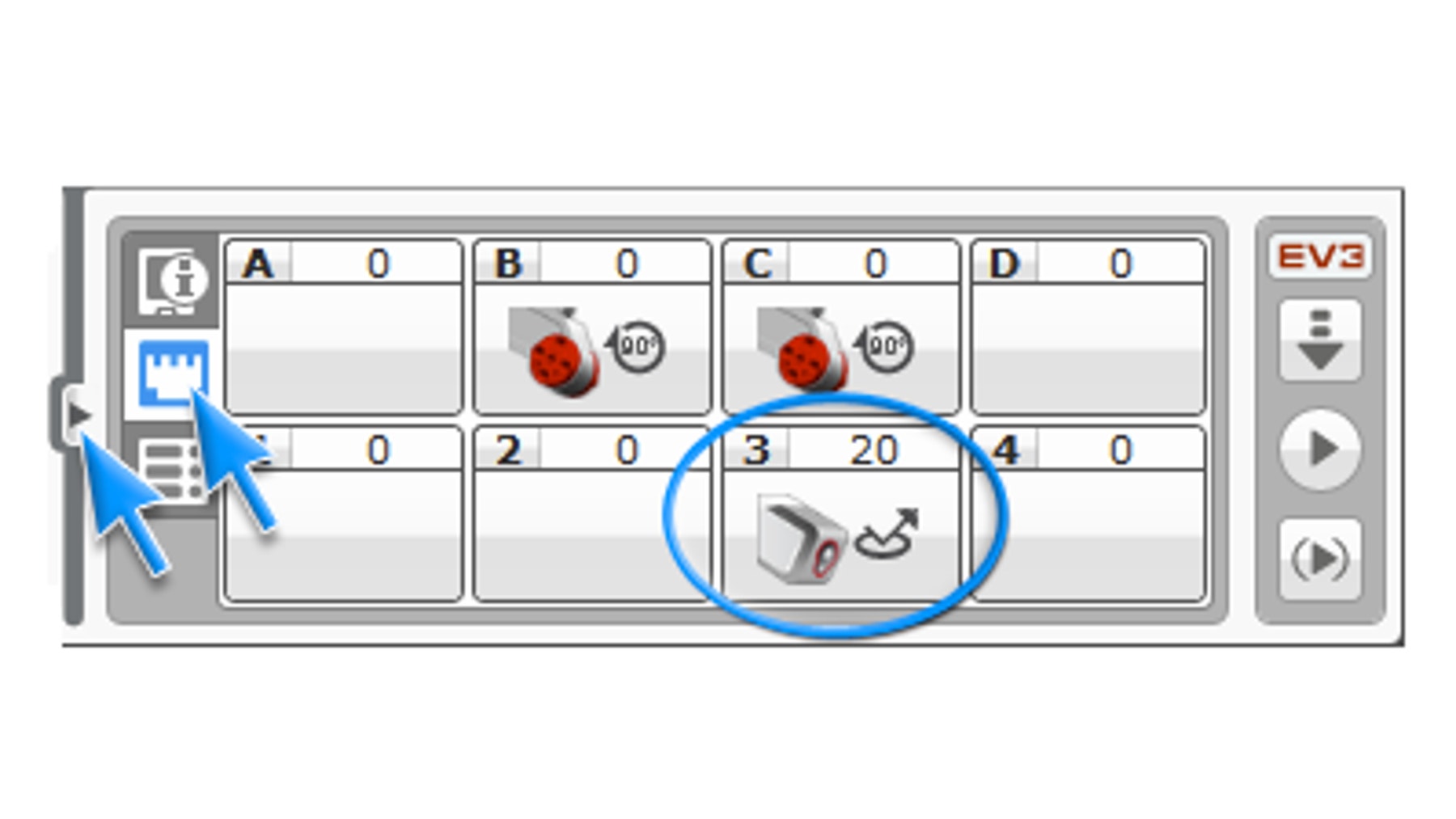
Bevæg først farvesensoren hen over den mørke linje.

Åbn derefter hardwaresiden, og notér den værdi, der vises på port 3. Dette er minimumværdien (x).
Flyt nu farvesensoren væk fra den mørke linje.
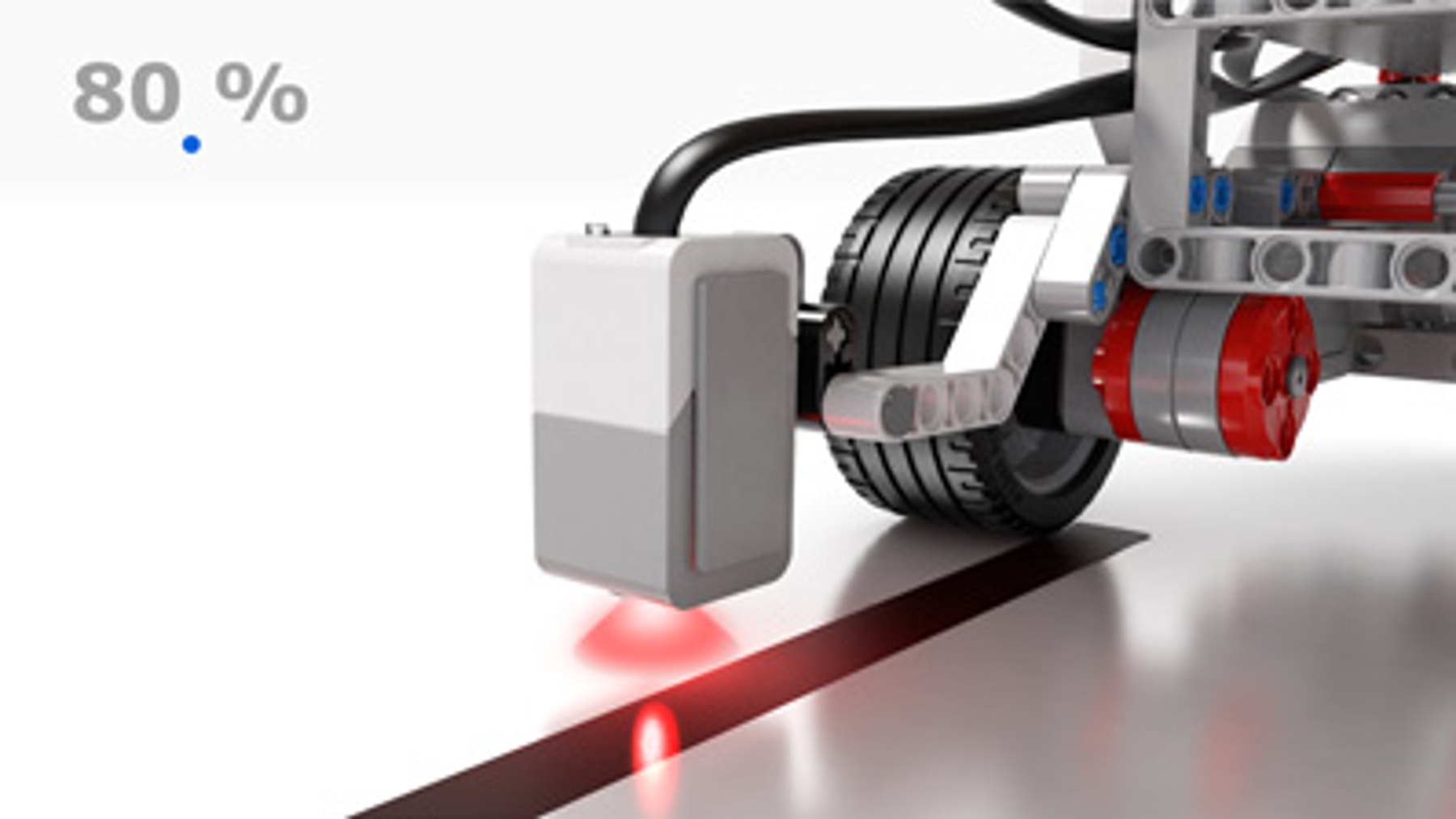
Notér den nye værdi, der vises på port 3. Dette er maksimumværdien (y).
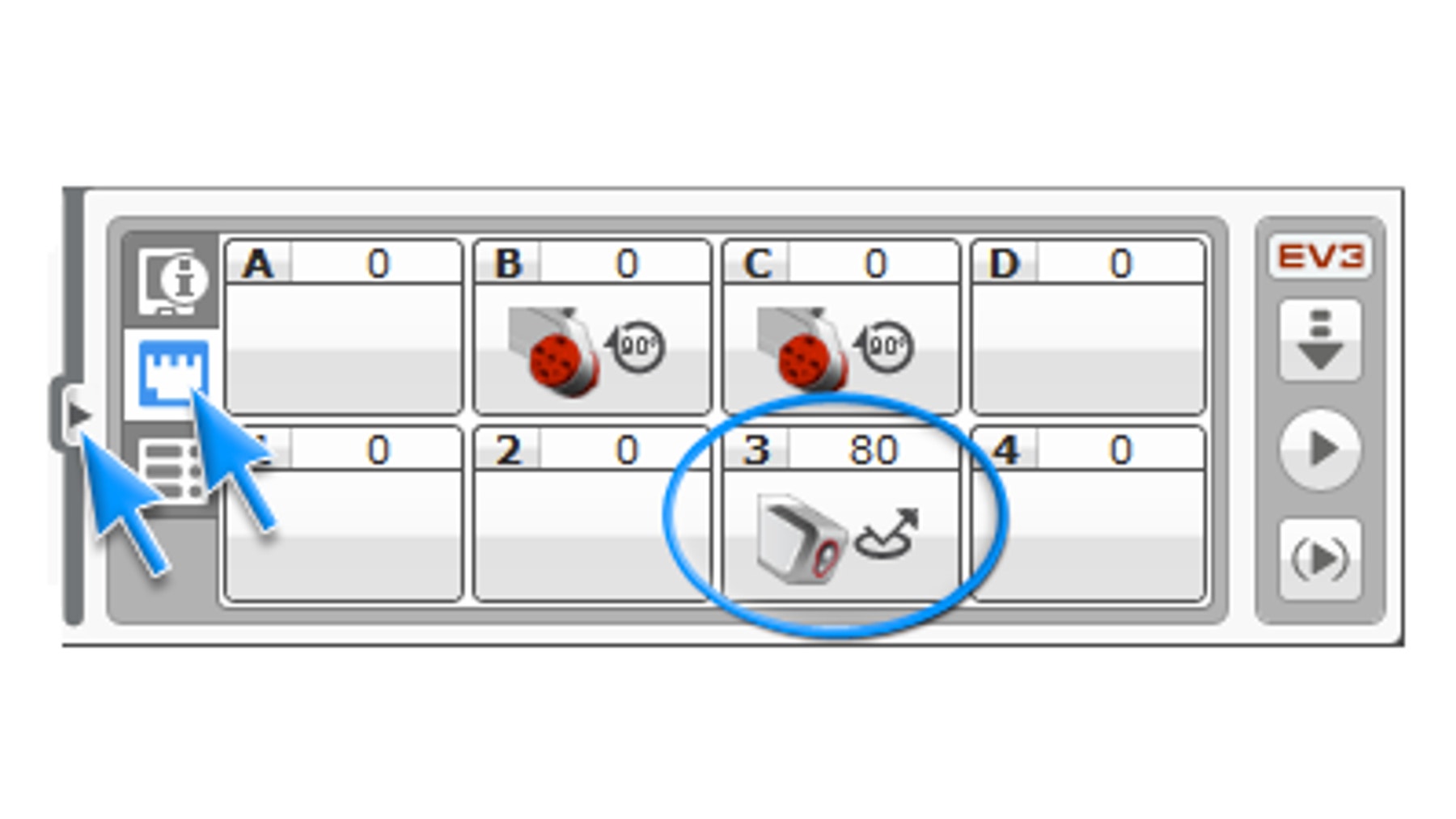
For at indstille tærsklen skal du beregne ligningen (x+y)/2 og indtaste resultatet i forgrening-blokken (din værdi kan afvige fra det viste eksempel).
Download derefter programmet.
Tilpas
Nu er det din tur! Afprøv, om chassiset fungerer, når det følger en lysere farvet linje! Hvis ikke, så prøv at indstille tærsklen igen.
Fejlfinding
På et tidspunkt vil det lys fra sensoren, som reflekteres af linjen, overstige tærsklen og derved få chassiset til at køre rundt i en cirkel. Hvis dette forekommer, skal tærskelværdien ændres.
Tip
Hvis forskellen mellem x- og y-værdierne er for lille, registreres linjen ikke. Hvis dette forekommer, kan det forsøges at omkalibrere sensoren.
Hvad kommer så?

Hjælp til lærere
Eleverne kan:
Bruge forgrening-blokken til at foretage dynamiske sensorbaserede beslutninger.
LEGO MINDSTORMS EV3-basissæt
LEGO MINDSTORMS Education EV3 Lab eller EV3 Programming




