Træningslejr 1: Kør rundt
Byg en træningsgrundmodel, og foretag præcise og kontrollerede bevægelser.

Lektionsplan
1. Forbered dig
- Læs elevmaterialet igennem i LEGO® Education SPIKE™ appen.
- Hvis du føler, der er behov for det, kan du planlægge en lektion ved hjælp af Kom godt i gang-materialet i appen. Det vil hjælpe eleverne med at blive fortrolige med LEGO Education SPIKE Prime.
2. Inddrag eleverne (5 min.)
- Brug idéerne i afsnittet Start en samtale nedenfor til at inddrage eleverne i en samtale om emnerne i denne lektion.
- Brug videoen til at forklare lektionen.
3. Undersøg (20 min.)
- Lad eleverne arbejde sammen to og to om at bygge træningsgrundmodellen.
- Giv dem tid til at bruge programmeringsstakkene til at undersøge grundmodellens bevægelse.
- Bed dem om at ændre blokkenes værdier og parametre og derefter observere virkningerne.
4. Forklar (5 min.)
- Snak om vigtigheden af at planlægge hvert trin i sit program.
- Forklar, hvad pseudokode er, og hvordan den kan hjælpe eleverne med at planlægge deres program.
5. Udbyg (15 min.)
- Få eleverne til at finde ud af, hvordan de kan få deres grundmodel til at køre i en firkant.
- Lav en navigationsudfordring, og lad eleverne teste deres færdigheder.
- Husk at sætte tid af til oprydning.
6. Evaluer
- Giv feedback om hver elevs præstation.
- For at forenkle processen kan du bruge det medfølgende evalueringsskema.
Start en samtale
For at vinde er det vigtigt at kunne navigere gennem de forskellige forhindringer på banen i en robotkonkurrence. Inddrag eleverne i en samtale ved at bede dem om at:
- beskrive en bestemt taktik, der bruges i deres foretrukne sportsgren
- notere alle de bevægelser, deres grundmodel efter deres mening skal kunne udføre
Lad eleverne se denne video om, hvad de skal til at lave.

Byggetips
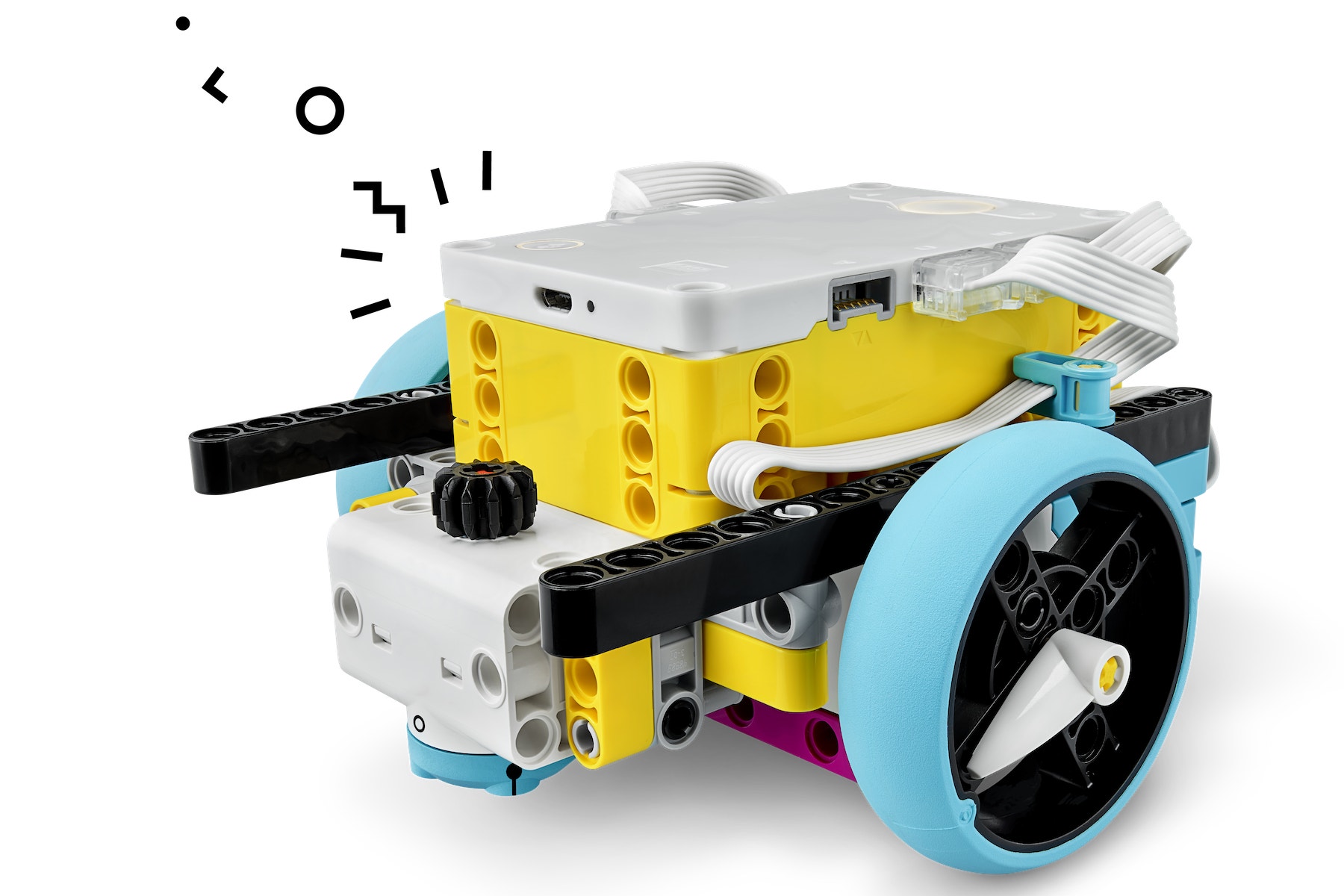
En simpel grundmodel
Brug den simple grundmodel uden sensorer. Husk at bruge kabelklemmerne.
Programmeringstips
Hovedprogram

Mulig løsning

Andre programmer

Differentiering
Du kan gøre denne lektion enklere ved at:
- bruge ekstra tid på at forklare, hvad hvert parameter i programblokkene styrer
Du kan gøre denne lektion mere udfordrende ved at:
- få eleverne til at bruge gyrosensoren til at programmere deres grundmodel til at køre i en firkant
- træne fart og præcision på en større overflade, f.eks. et konkurrencebord
Evalueringsmuligheder
Lærerens observationstjekliste
Lav en skala, der passer til dine behov, f.eks.:
- Delvist gennemført
- Gennemført
- Gennemført over forventning
Brug de følgende succeskriterier til at evaluere elevernes fremskridt:
- Eleverne kan vælge de relevante blokke til at foretage kontrollerede bevægelser.
- Eleverne kan ændre blokkenes parametre iterativt.
- Eleverne kan stable relevante bevægelsesblokke for at lave programmer.
Selvevaluering
Få hver elev til at vælge den klods, de føler bedst repræsenterer deres præstation.
- Blå: Jeg har fået grundmodellen til at køre på forskellige måder.
- Gul: Jeg har lavet forskellige programmer for at få grundmodellen til at køre i en firkant.
- Violet: Jeg har kombineret forskellige typer motorbevægelser for at køre uden om forhindringer.
Fælles evaluering
Tilskynd eleverne til at give hinanden feedback ved at:
- Få en elev til at bedømme en andens præstation ved hjælp af skalaen med farvede klodser ovenfor.
- Få dem til at give konstruktiv feedback til hinanden for at forbedre gruppens præstation i den næste lektion.

Idéer til videre arbejde – faglig kommunikation
For at styrke elevernes færdigheder i faglig kommunikation:
- Få eleverne til at lede efter den mest præcise metode til at bevæge sig over en afstand på 2 meter ved at undersøge følgende muligheder:
▷ Kør i sekunder
▷ Kør i grader
▷ Kør i omdrejninger
▷ Kør med sensor - Bed dem om at udarbejde et dokument, hvor de forklarer, i hvilke(n) situation(er) de ville bruge hvilken mulighed, og hvorfor.
Bemærk: Dette vil forlænge lektionen.
Idéer til videre arbejde – matematik
For at styrke elevernes færdigheder i matematik:
Ved beregning af afstande med grundmodellen:
- Kør fremad i ét sekund, én omdrejning eller et antal grader. Brug dette som grundlag for at lave et skøn over den samlede afstand baseret på den tilbagelagte afstand.
- Beregn omkredsen af hjulet, og brug denne til at måle den tilbagelagte afstand (omkreds = pi x diameter, eller omkreds = pi x 2 x radius)
Bemærk: Dette vil forlænge lektionen.
Mulige karrierer
Hvis eleverne kunne lide denne lektion, ville de måske være interesserede i at undersøge karrieremuligheder inden for:
- Sundhed (medicinal- og sundhedskarrierer)
- Informationsteknologi (spilprogrammering)
Hjælp til lærere
Eleverne skal:
- udføre kontrollerede bevægelser (f.eks. lige bevægelse, drejning på stedet, buet bevægelse, drejning med sensor, kørsel i en figur) med en grundmodel
Teknologiforståelse (efter 6. klassetrin)
Algoritmer
- Eleven kan genkende og tilrette algoritmer i forskellige sammenhænge og redegøre for deres funktion
- Eleven har viden om kendetegn ved algoritmer og deres opbygning, samt hvordan de anvendes i forskellige sammenhænge
Teknologiforståelse (efter 9. klassetrin)
Algoritmer
- Eleven kan vurdere forskellige algoritmers anvendelighed og kan benytte forskellige metoder til at afprøve algoritmer
- Eleven har viden om forskellige parametre til vurdering af algoritmers anvendelighed
Natur/teknologi (efter 6. klassetrin)
Teknologi og ressourcer
- Eleven kan udvikle enkle produkter
- Eleven har viden om udvikling og vurdering af produkter
Fysik/kemi
Produktion og teknologi
- Eleven kan designe og gennemføre undersøgelser vedrørende elektronisk og digital styring
- Eleven har viden om elektroniske kredsløb, simpel programmering og transmission af data
Elevmateriale
Elevark
Download, få vist eller del som en online HTML-side eller en PDF-fil, der kan udskrives.




