Find den rette linje!
Det er let at vinde et racerløb. Man skal som regel bare være hurtigst og blive i sin bane.
Ville det hjælpe, hvis man kunne følge en linje?
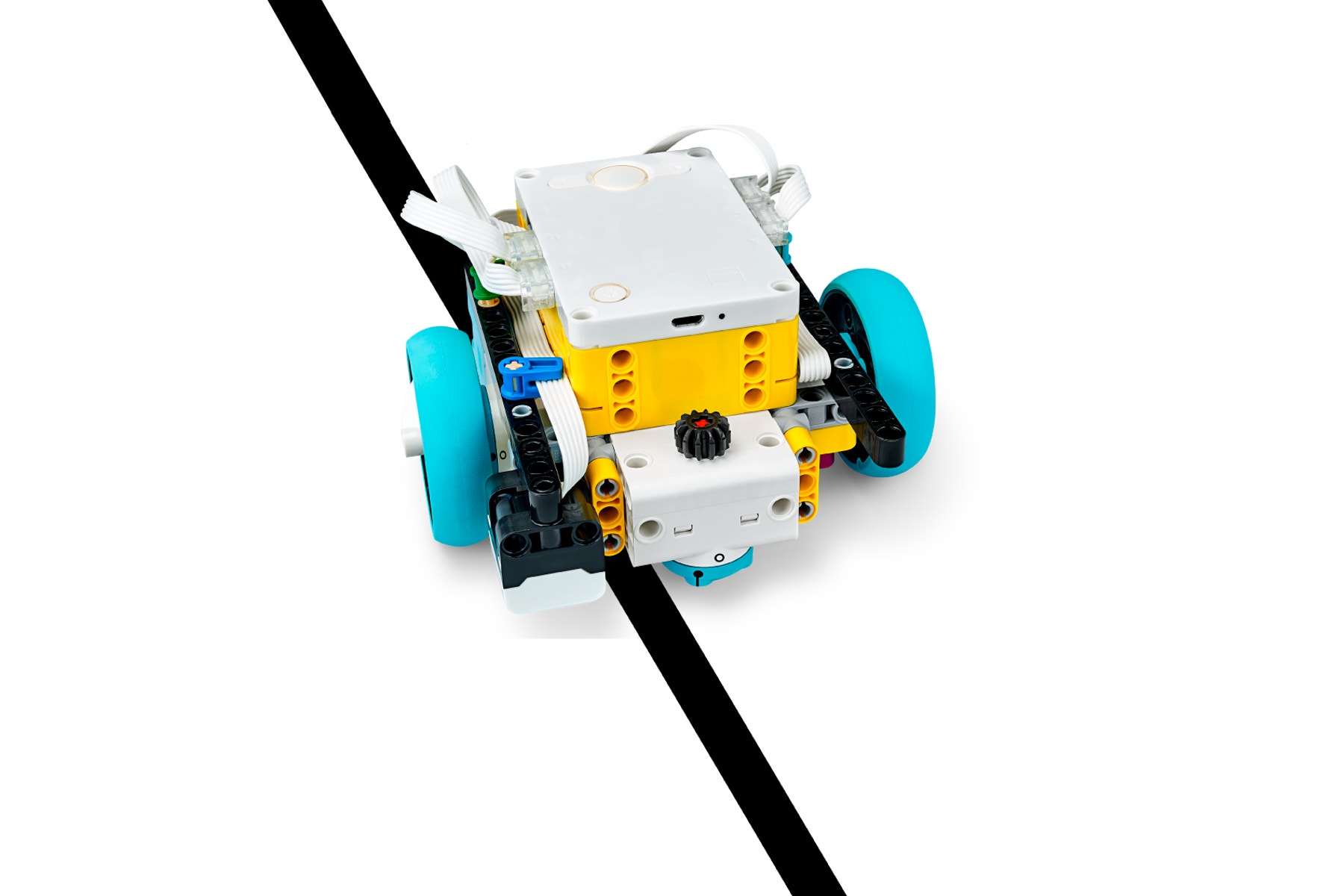
Byg denne grundmodel med en farvesensor.

Lad os komme i gang!
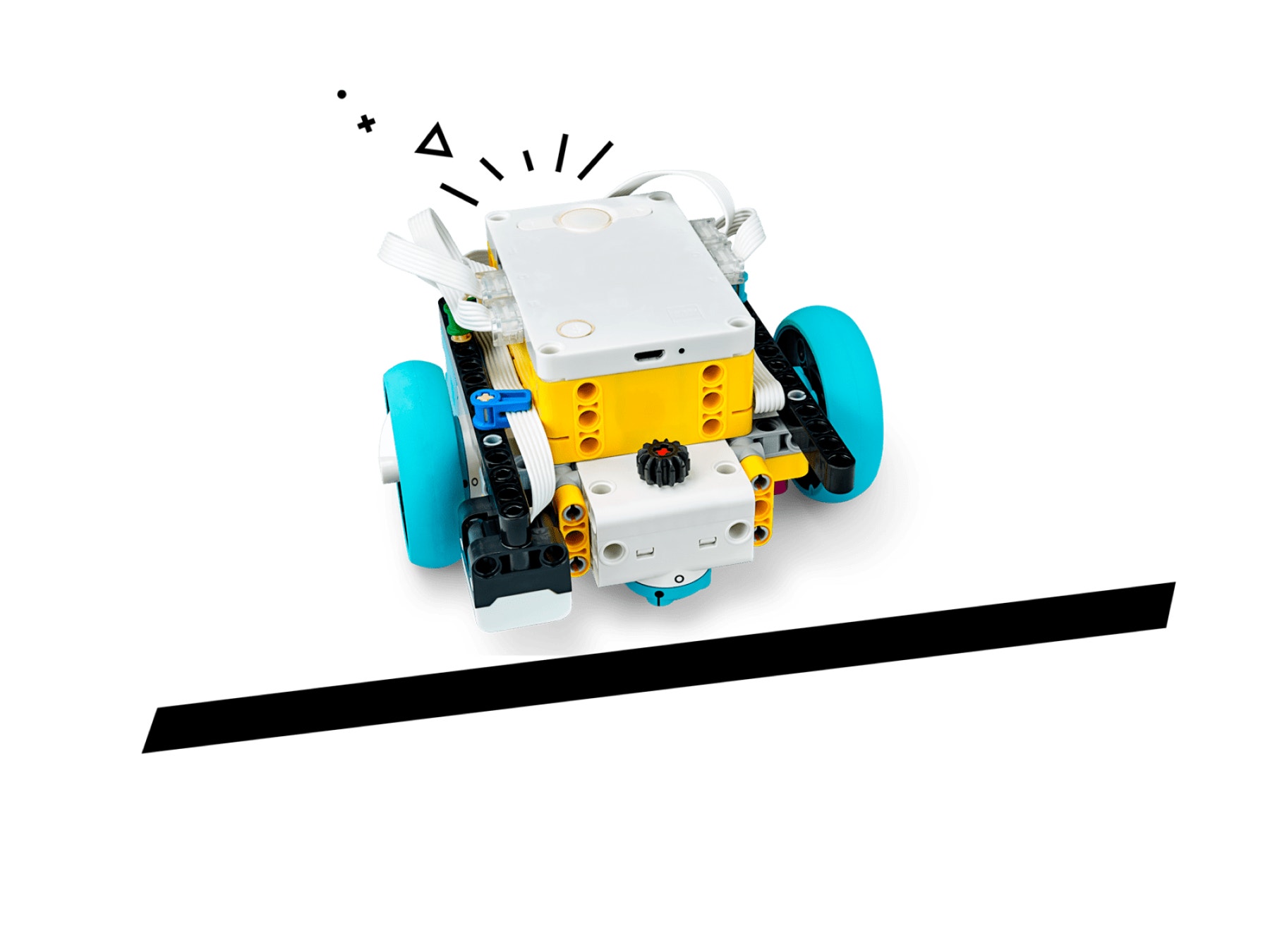
Kør og stop ved en linje.

Afprøv den første programmeringsstabel, og beskriv, hvad I ser.
Denne første stabel får grundmodellen til at stoppe ved en linje, der er vinkelret i forhold til bevægelsesretningen.
Linjen kan være:
- En sort linje tegnet på et stykke papir
- Sort tape
- Større sorte LEGO klodser
Kør på en linje.
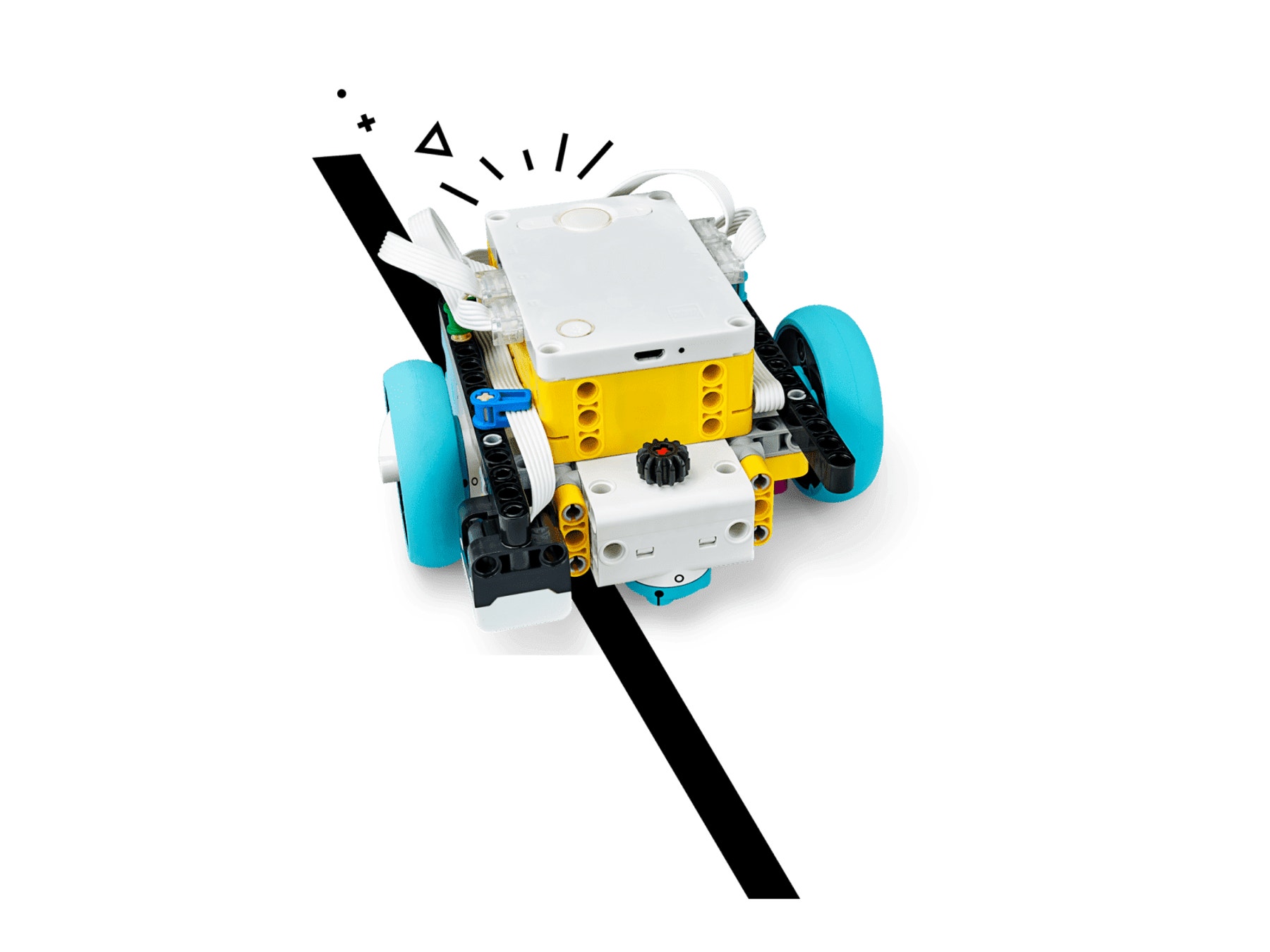
Afprøv den anden programmeringsstabel, og beskriv, hvad I ser.
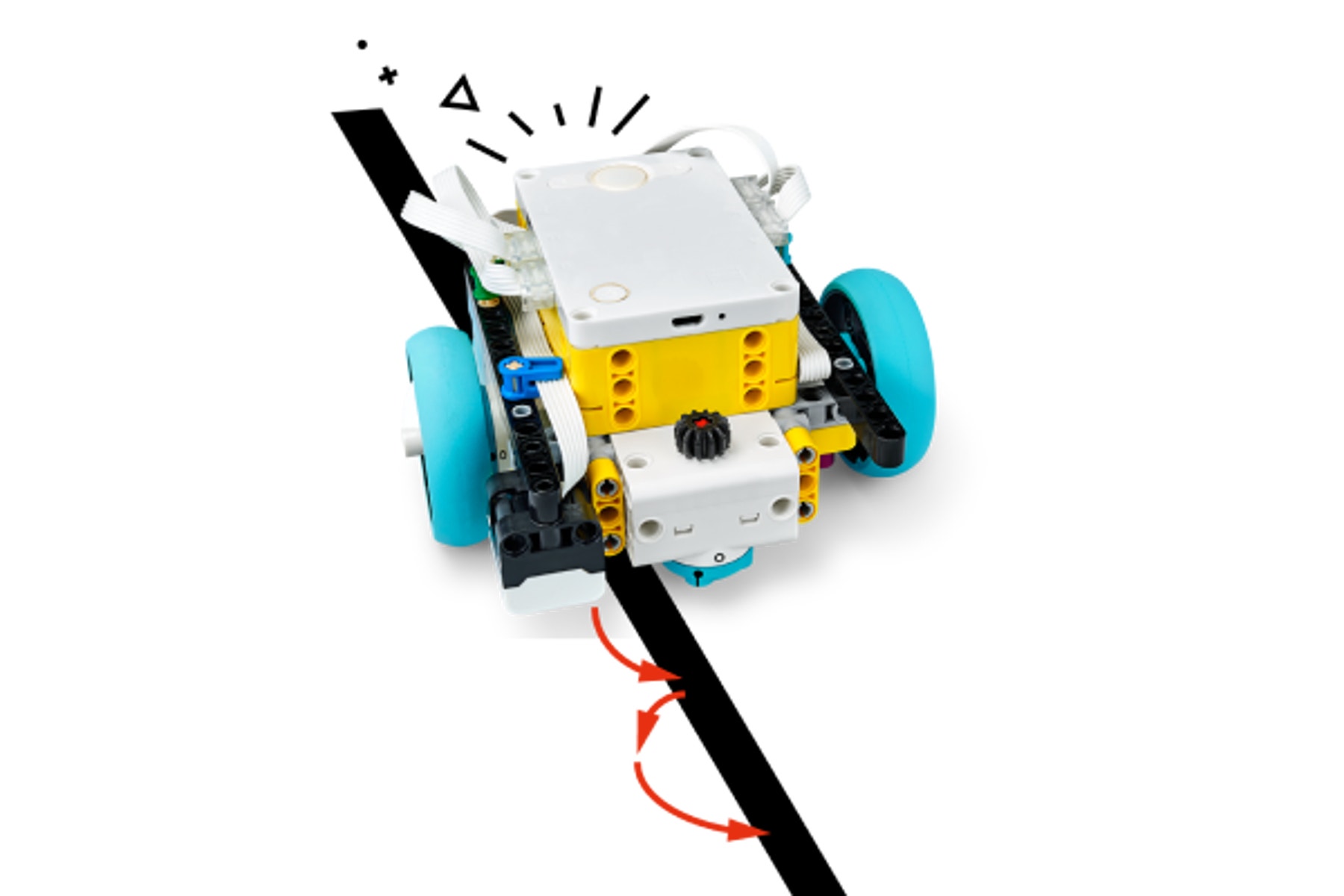
Hvis farvesensoren registrerer kanten af den sorte linje, vender grundmodellen sig mod det hvide område.
Hvis farvesensoren ikke registrerer kanten af den sorte linje, vender grundmodellen sig i den modsatte retning af den sorte linje.
Gentag disse 2 handlinger for evigt.
Måske har I bemærket, at vi styrer motorerne med 50 på den højre motor og -50 på den venstre motor. Ved I hvorfor?
For at grundmodellen kan bevæge sig langs linjen skal den ene motor være i bevægelse og den anden motor stå stille. Hvis grundmodellen drejer for skarpt, vil den bare dreje frem og tilbage på samme sted.
Optimer jeres program i forhold til fart.
Der er mange måder at lave en hurtig linjefølger på.
Arranger et racerløb for at se, hvis grundmodel der kan køre hurtigst!
Tilføj en "HVIS ELLERS"-blok for at gøre programmet hurtigere.
Undersøg nogle flere linjefølgerprogrammer – I vil ikke tro, hvor meget man kan øge hastigheden!
Programmet kunne se således ud:

Hvordan gik det?

Hvad klarede I godt? Er der noget, du kunne have gjort bedre?
Fantastisk! Nu skulle I kunne bevæge jeres grundmodel stort set overalt på en bane.