Bergauf
Es soll ein Roboter entwickelt werden, der sich selbständig möglichst steil bergauf bewegen kann.

Verknüpfen
(30 Min.)
Nutzen Sie dieses Video:
- um den Schülerinnen und Schülern reale Roboter vorzustellen
- um den Schülerinnen und Schülern Prinzipien aus Physik und Mathematik näherzubringen: Entfernung (Wegstrecken), Geschwindigkeit, Energie und Leistung; Gleichgewicht, Stabilität und Schwerpunkt, Bewegungsmuster und Koordinatensysteme, Energieübertragung, Steigung/Gefälle und weitere Herausforderungen für die Bewegung von Robotern
- um zu zeigen, wie Roboter „denken“: Woher wissen Roboter, wo sie sich befinden und was sie tun müssen?
- um die Schüler zu motivieren, ihre eigenen Roboter zu konstruieren
Roboter in Bewegung - Diskussion
- Betrachte die Art und Weise, wie sich Maschinen und Roboter ohne Räder bewegen. Wähle ein Beispiel aus und verfolge, wie die Bewegung von einem Bauteil auf das andere übertragen wird.
Mit dieser Frage werden die Schülerinnen und Schüler vor die Aufgabe gestellt, zu beobachten und zu beschreiben, wie sich ein Roboter bewegt, und hierfür Fachbegriffe aus der Physik (Leistung, Energie, Arbeit, Schwerpunkt und Stabilität) zu verwenden. - Vergleiche die Art und Weise, wie sich die beiden Lauf-Roboter bewegen. Was fällt dir an der Art und Weise auf, wie sie beim Gehen das Gleichgewicht halten?
Der ZI-Insektenroboter hebt ein Bein auf der einen Seite, aber nicht auf der anderen Seite. Der menschenähnliche Roboter hält sein Gleichgewicht auf unterschiedliche Weise (z. B. durch langsames Bewegen, durch Korrigieren der Fußstellung, durch Ausstrecken und anschließendes seitliches Anlegen der Hände).
Konstruktionsziele
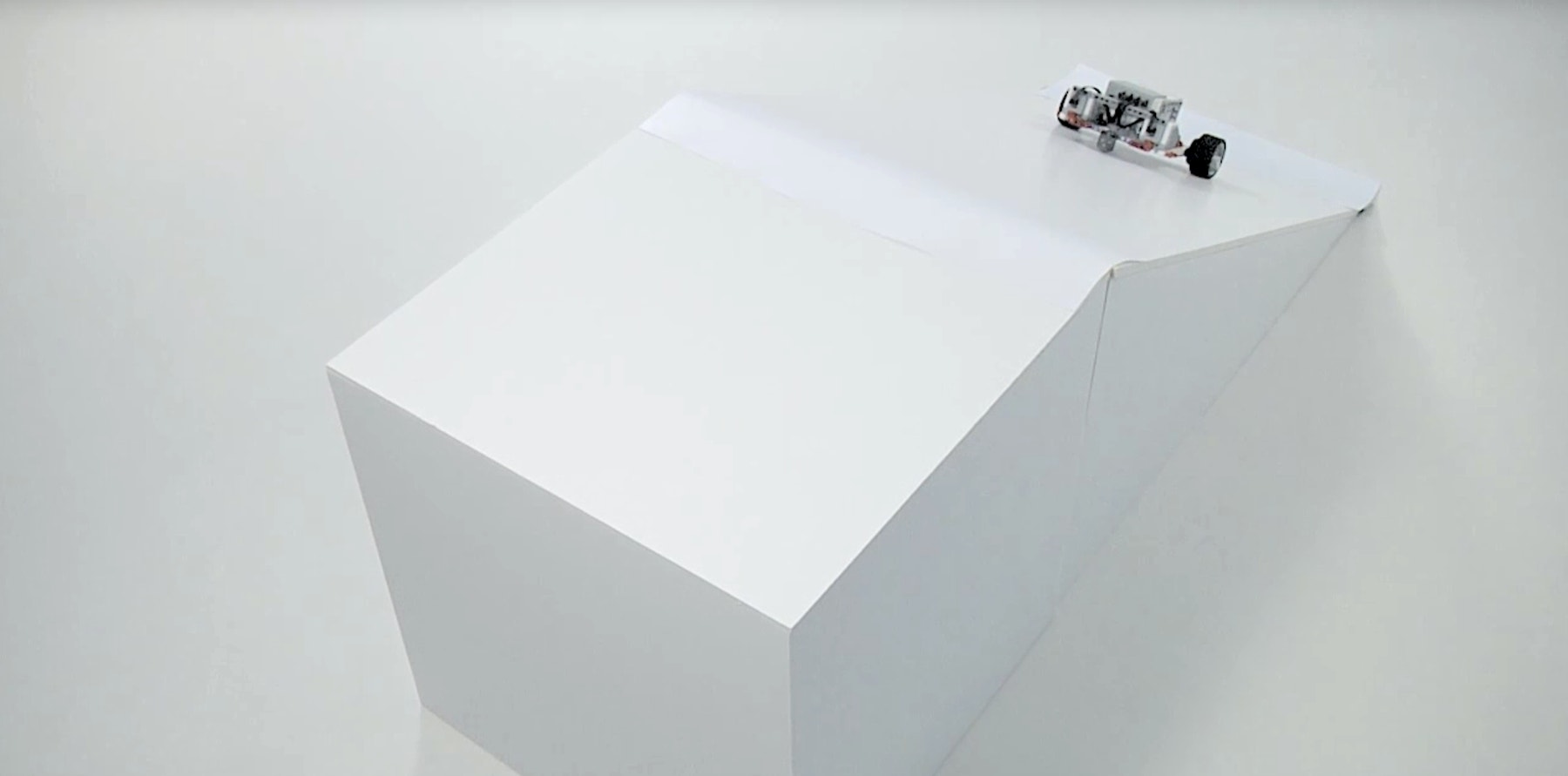
Es soll ein Roboter entwickelt werden, der sich selbständig möglichst steil bergauf bewegen kann.
Ideen sammeln
Das Sammeln der Ideen ist ein aktiver, kreativer Prozess. Dabei entwickeln die Schülerinnen und Schüler auch ihr konzeptionelles Verständnis. Zur Anregung können Sie ihre Schülerinnen und Schüler auffordern
- sich die Videos aus der Rubrik „Roboter in Aktion“ anzusehen
- die Projekte „Entfernungen messen“ und „Geschwindigkeit bestimmen“ aus dem Kapitel „Grundlagen“ anhand der dort enthaltenen Bauideen zu untersuchen – mit besonderem Schwerpunkt auf dem Beispiel für den Gebrauch von Zahnrädern
- die vorgeschlagenen Beispiele aus dem Kapitel „Ideen-Fundgrube“ zu bauen und zu erkunden, wie diese Modelle funktionieren
- ihren Roboter ganz individuell zu gestalten (zu personalisieren) oder eine Situation zu beschreiben, in der ein Roboter von Bedeutung ist, der sich eine Steigung hinaufbewegt (bspw. der Mars-Rover der NASA namens „Curiosity“, der im Video zu „Roboter in Bewegung“ an einer Steigung getestet wird).
Ideen-Fundgrube:
Auswahl der besten Lösung
Beschreibe die Lösung, die gebaut und programmiert werden soll.
Überlege noch einmal, über welche anderen Lösungen beim Sammeln der Ideen diskutiert wurde. Erkläre dann, warum genau diese Lösung zur Erfüllung des Konstruktionsziels gewählt wurde.
Umsetzen
(30 Min.)
Bauen und Programmieren
Jetzt wird die Lösung in die Praxis umgesetzt. Baue und programmiere den Roboter.
Während der Arbeit muss ein genaues Protokoll geführt werden. Denke dabei an folgende Punkte:
- Welche Konstruktionsdetails waren besonders gut?
- Welche Änderungen mussten beim Bauen und Programmieren vorgenommen werden?
- Was sollte zusätzlich ausprobiert werden?
Deine Versuchsergebnisse trägst du in die Tabelle auf der nächsten Seite ein.
Begreifen
(30 Min.)
Messen und Auswerten
Wie gut werden die Konstruktionsziele erreicht?
Zeichne hier deine Messdaten auf. Benenne die Spalten und Zeilen z.B. folgendermaßen: Messung (Nummer), Steigungswinkel, Untersetzungsverhältnis, Motor-Leistung, Zeit und Kommentar.
Beurteilen und Verbessern
Denke über deine Lösung noch einmal nach.
- Fällt es dem Roboter leicht oder schwer, sich die Steigung hinaufzubewegen?
- Hast du verschiedene Einstellungen getestet, um die Motorleistung zu optimieren?
- Wie haben andere Teams das Problem gelöst?
Die Schülerinnen und Schüler sollen sich noch einmal die Konstruktionsziele, ihre Notizen zur Ideensammlung und ihre Messdaten ansehen. Es sollte eine ernsthafte Beurteilung der Projektbearbeitung durch die anderen Teams stattfinden. Dieser Beurteilungsprozess hilft den Schülerinnen und Schülern dabei, ihre Fähigkeit zu konstruktiver Kritik (Feedback) zu entwickeln. Sie lernen aufgrund objektiver Daten zu argumentieren und zu urteilen.
Kommunizieren
Schlagen Sie ihren Schülerinnen und Schülern folgende Elemente vor:
- ein Video des Projekts, das vor allem die Abschlusspräsentation und die Leistung des Roboters zeigt
- eine Beschreibung der wichtigsten Merkmale des Software-Programms
- eine Bauanleitung für das Modell. Dazu können beim Zerlegen des Modells Fotos gemacht werden
- ein Bild des Programms mit Kommentaren
- ein Foto des Teams
Erweitern
(30 Min.)
Kommunizieren
Schlagen Sie ihren Schülerinnen und Schülern folgende Elemente vor:
- ein Video des Projekts, das vor allem die Abschlusspräsentation und die Leistung des Roboters zeigt
- eine Beschreibung der wichtigsten Merkmale des Software-Programms
- eine Bauanleitung für das Modell. Dazu können beim Zerlegen des Modells Fotos gemacht werden
- ein Bild des Programms mit Kommentaren
- ein Foto des Teams
Musterlösung - Inhaltsübersicht
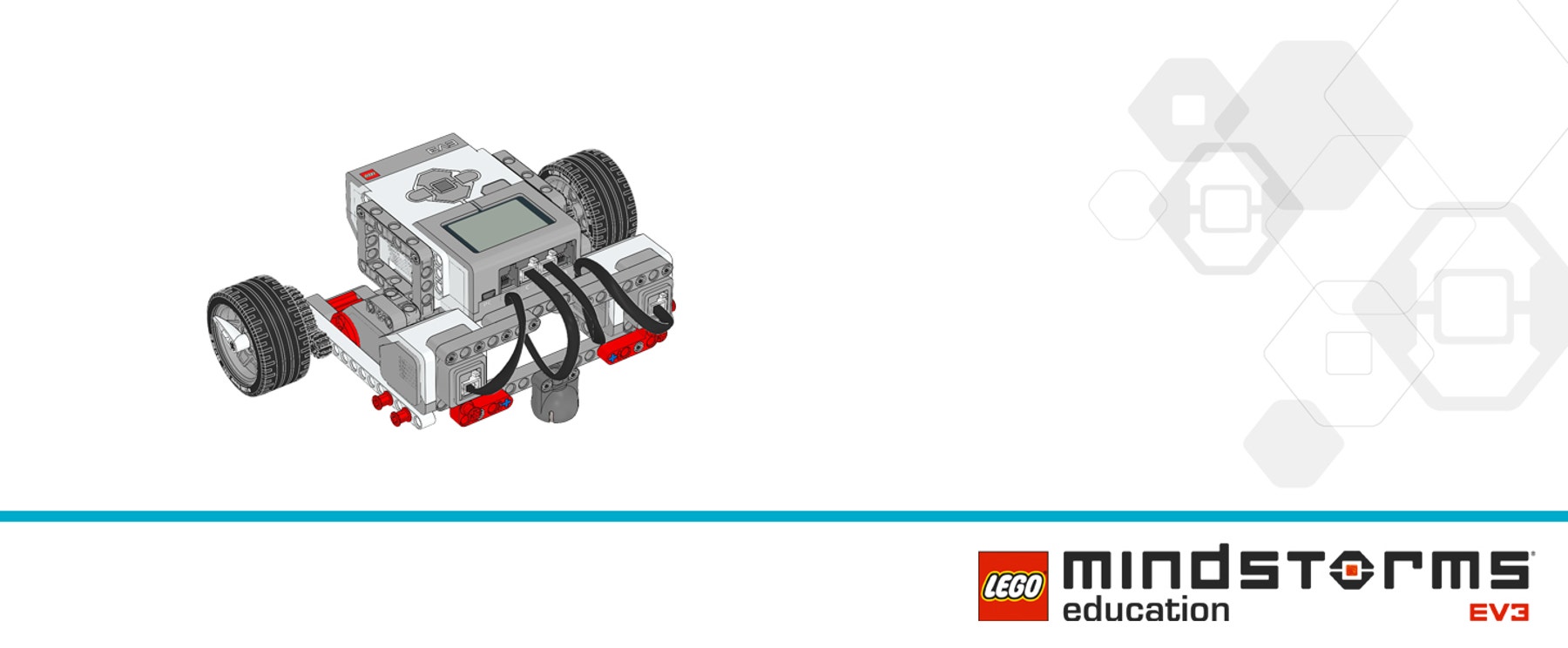
Die Zahnrad-Roboter-Lösung ist nur eine von vielen möglichen Lösungen für das Projekt „Roboter in Bewegung - Bergauf“.
Musterlösung - Bauideen
Beim Zahnrad-Roboter werden die folgenden Bauideen kombiniert (siehe Kapitel “Ideen-Fundgrube”): Kugelrad, EV3-Rahmen und Untersetzung.
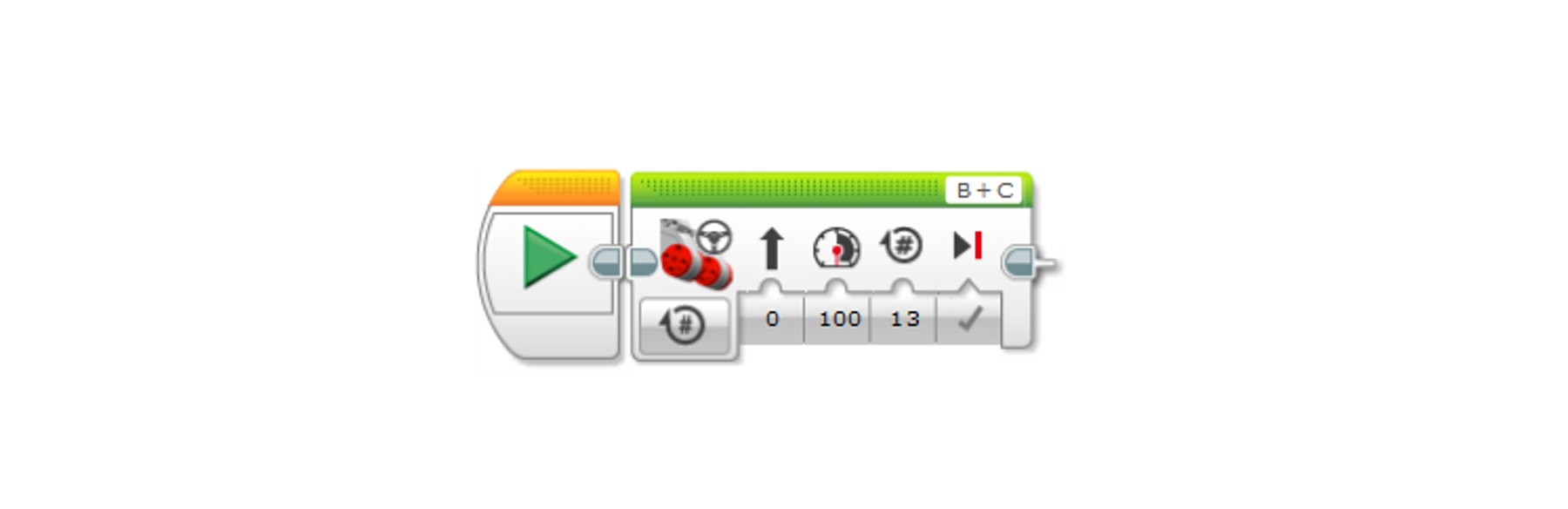
Musterlösung - Programm
Dieses Programm
- schaltet die Motoren B und C an und lässt sie 13 Sekunden lang mit voller Leistung vorwärts drehen
Die Motorbewegung wird untersetzt (Untersetzungsverhältnis: 0,33:1). Das heißt, das Antriebszahnrad muss sich dreimal drehen, damit das angetriebene Zahnrad eine Drehung vollführt. Diese Zahnradanordnung verdreifacht den mechanischen Vorteil des Motors: Durch die Untersetzung überträgt der Motor dreimal mehr Kraft auf die Räder als ohne Zahnradgetriebe.
Unterstützung für Lehrkräfte
Die Schülerinnen und Schüler werden
• einen Roboter entwerfen, bauen und programmieren, der selbständig möglichst steil bergauf fahren kann.
• den Zusammenhang zwischen Geschwindigkeit, Leistung, elektrischer und mechanischer Energie erkennen
• lernen, dass sich die Steigung als Anstieg oder Gefälle messen lässt
LEGO MINDSTORMS EV3 Set
EV3 Software oder Programmier-App
Lernvoraussetzungen
Die Schülerinnen und Schüler sollten wissen, wie ein Programm erstellt und heruntergeladen wird und wie sich ein Motor programmieren lässt.
**Inhaltsbezogene Kompetenzen **
NwT / NT
• Object mit Antrieb (Elektromotor)
• EVA-Prinzip
• Algorithmus programmieren
• zeitgesteuerter Prozess
Technik
• Fahrzeug konstruieren
• Aktoren ansteuern
AWT / AL
• Programmsteuerung realisieren
BNT
• mehrteiliges Objekt herstellen
• Antrieb nutzen
• technische Lösungen vergleichen
Informatik
• Roboter konstruieren
• Algorithmus programmieren
• Aktoren ansteuern
Materialien für Schülerinnen und Schüler
Schülerarbeitsblatt
Als HTML-Webseite oder PDF-Datei zum Ausdrucken herunterladen, anzeigen oder weiterleiten.




