Drehung mithilfe eines Sensors
Deine Aufgabe lautet, den Roboter so zu programmieren, dass er eine Punktdrehung in einem exakten Winkel ausführt, indem der Gyrosensor verwendet wird.
Schritt für Schritt
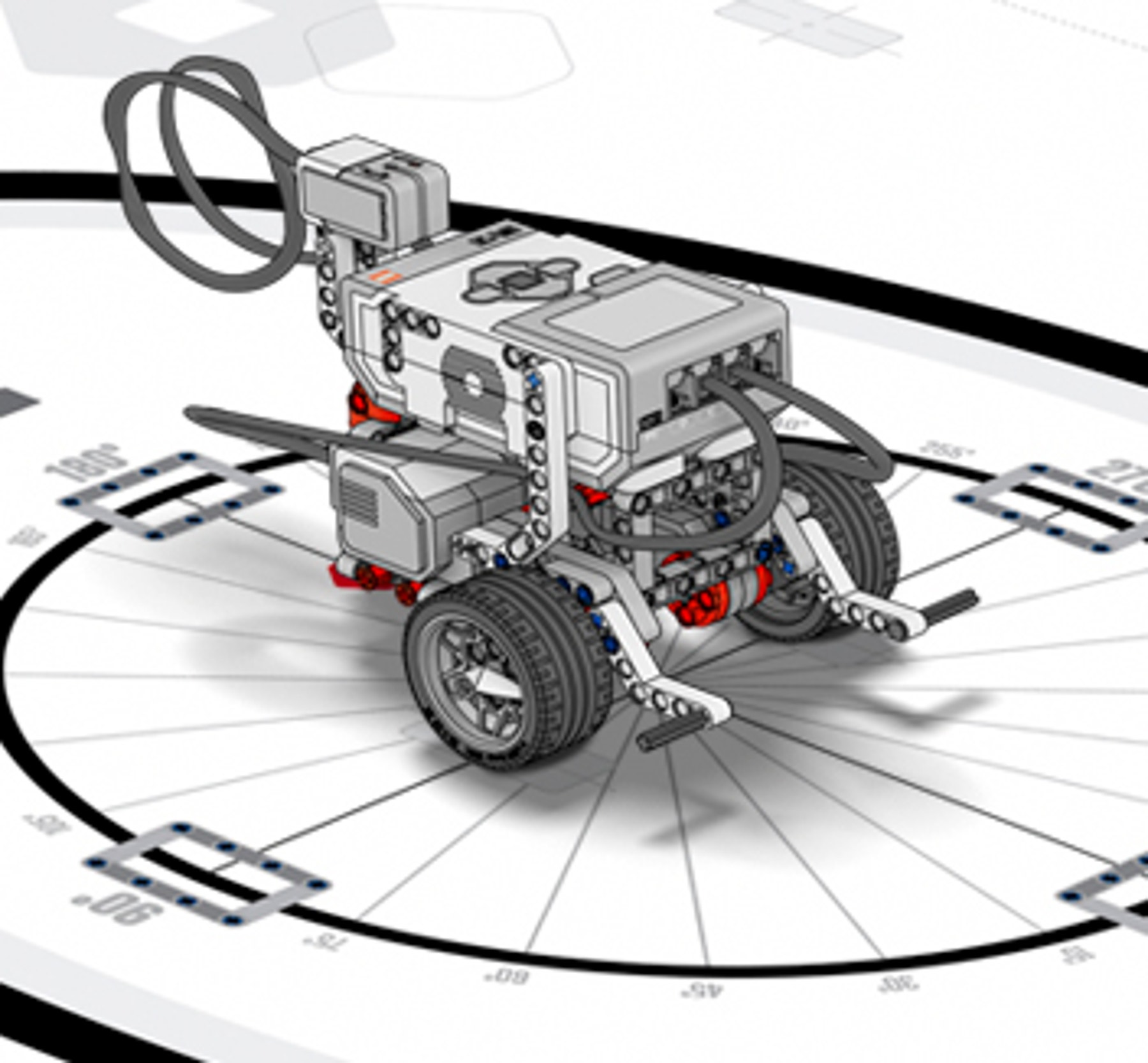
- Roboter bauen
- Programmieren
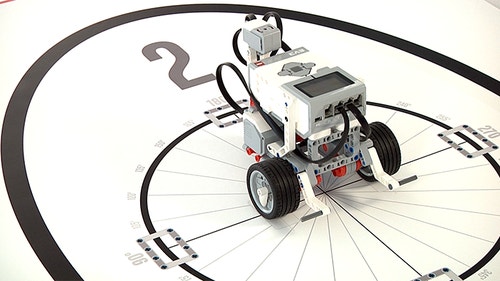
- Den Roboter an Position 2 auf Matte 2 stellen und das Programm starten
- Dokumentieren
- Mehr über die Anwendung des Gyrosensors zur Kontrolle der Bewegungen deines Roboters lernen
Für dieses Projekt sind folgende Kapitel aus dem Robot Educator hilfreich:
- Bei Winkel stoppen
- Schleife
Während dieser Mission untersuchen die Schülerinnen und Schüler den Zusammenhang zwischen der Sensoreingabe und dem Verhalten des Roboters. Die Drehung des Fahrgestell wird vom Gyrosensor kontrolliert.
Unterstützen Sie die Schülerinnen und Schüler,
• die richtigen Fachbegriffe zu verwenden
• die Funktionen der Programmier-Blöcke zu erkennen
• gute Wege zu finden, um den Drehwinkel ihres Roboters zu testen
• zu erkennen, welche Faktoren die Genauigkeit des Stoppens bei der Verwendung eines Gyrosensors beeinflussen (Sensortoleranz, Motorschlupf und Drehmoment).
Themaeinführung
(5 Minuten )
Das Drehen mit nur einem Rad ist nicht sehr genau. Wenn du versuchst, deinen Roboter im Staub oder auf einer rutschigen Oberfläche zu drehen, dreht er womöglich nicht um den richtigen Winkel. Der Gyrosensor hilft dir bei viel genaueren Drehungen.
Deine Aufgabe lautet, den Roboter so zu programmieren, dass er eine Punktdrehung in einem exakten Winkel ausführt, indem der Gyrosensor verwendet wird.
Aufbau
(20 Minuten )
Roboter bauen
Klicke auf die nachstehenden Links, um die Bauanleitungen zu öffnen, baue dann das Modell und kehre zu diesem Projekt zurück, um fortzufahren. Überspringe diesen Schritt, falls das Modell bereits gebaut wurde.
WICHTIG:
Beim Anschließen des Kabels und beim Hochfahren des EV3-Steins müssen der Gyrosensor und der EV3-Stein unbedingt ganz ruhig gehalten werden.
Programmierung
Programmiere das gezeigte Programm nach und lade es anschließend auf deinen Roboter.

Zusammenfassung des Programms
Start
Hebellenkung – Leistung B [10], Leistung C [-10]
Warten - Gyrosensor - Drehwinkel vergleichen - Typ [3] (Größer oder gleich), Winkel in Grad [90]
Hebellenkung – Aus
Problembehebung
Der Winkel muss angepasst werden – normalerweise muss der Wert unter 90 Grad liegen.
Theorie
Bei der Verwendung des Gyrosensors muss der Wert der im Sensor-Block notierten Drehung der Drehung des Fahrgestells entsprechen. Die Genauigkeit des Sensors beträgt +/- 3 Grad. Der Motorschlupf und die durch den Stopp der Drehung entstehende Verzögerung können die Genauigkeit ebenfalls beeinflussen.
Die Leistung der Batterie, die Radgröße, die Reibung des Roboters auf der Oberfläche, der Abstand zwischen den beiden Rädern sind keine Faktoren mehr, die die Genauigkeit der Roboterdrehung beeinflussen können.
Beobachtung
(20 Minuten)
Programm starten und beobachten
Stelle den Roboter an Startposition 2 auf Matte 2 und starte das Programm.
Dokumentiere deine Arbeit
Beschreibe, was dein Roboter bei jedem Programmschritt getan hat: Mein Roboter ...
Schätze den Drehwinkel deines Roboters:
Die Drehung meines Roboters betrug ungefähr ...
Erkläre den Unterschied zwischen der Drehung deines Roboters mit und ohne Gyrosensor:
Mit Gyrosensor ...
Beurteilen und verbessern
Verändere das Programm, damit der Roboter folgende Punktdrehung ausführt:
- Im Uhrzeigersinn um 45 Grad
- Im Uhrzeigersinn um 180 Grad
- Im Uhrzeigersinn um 360 Grad, gefolgt von einer Punktdrehung entgegen dem Uhrzeigersinn um 360 Grad
Wie viel hat sich dein Roboter gedreht, verglichen mit dem, was das Programm vorgegeben hat?
Er hat sich gedreht ...
Aufgabe
Drehe deinen Roboter 45 Grad im Uhrzeigersinn.

Lösung - Zusammenfassung des Programms
Start
Hebellenkung – Leistung B [10], Leistung C [-10]
Warten - Gyrosensor - Drehwinkel vergleichen - Typ [3] (Größer oder gleich), Winkel in Grad [45]
Hebellenkung – Aus
Problembehebung
Der Winkel muss angepasst werden – normalerweise muss der Wert unter 45 Grad liegen.
Aufgabe
Drehe deinen Roboter 180 Grad im Uhrzeigersinn.

Lösung - Zusammenfassung des Programms
Start
Hebellenkung – Leistung B [10], Leistung C [-10]
Warten - Gyrosensor - Drehwinkel vergleichen - Typ [3] (Größer oder gleich), Winkel in Grad [180]
Hebellenkung – Aus
Problembehebung
Der Winkel muss angepasst werden – normalerweise muss der Wert unter 180 Grad liegen.
Aufgabe
Drehe deinen Roboter im Uhrzeigersinn um 360 Grad, gefolgt von einer Punktdrehung entgegen dem Uhrzeigersinn um 360 Grad.

Lösung - Zusammenfassung des Programms
Start
Hebellenkung – Leistung B [10], Leistung C [-10]
Warten - Gyrosensor - Drehwinkel vergleichen - Typ [3] (Größer oder gleich), Winkel in Grad [360]
Hebellenkung – Aus
Warten - Zeit in Sekunden [2]
Hebellenkung – Leistung B [10], Leistung C [-10]
Warten - Gyrosensor - Drehwinkel vergleichen - Typ [5] (Größer oder gleich), Winkel in Grad [0]
Hebellenkung – Aus
Ausbau und Verbesserung
(15 Minuten)
Fahre fort mit dem Erforschen
Erstelle ein neues Programm, in dem eine Schleife verwendet wird, damit dein Roboter ein Quadrat fährt.
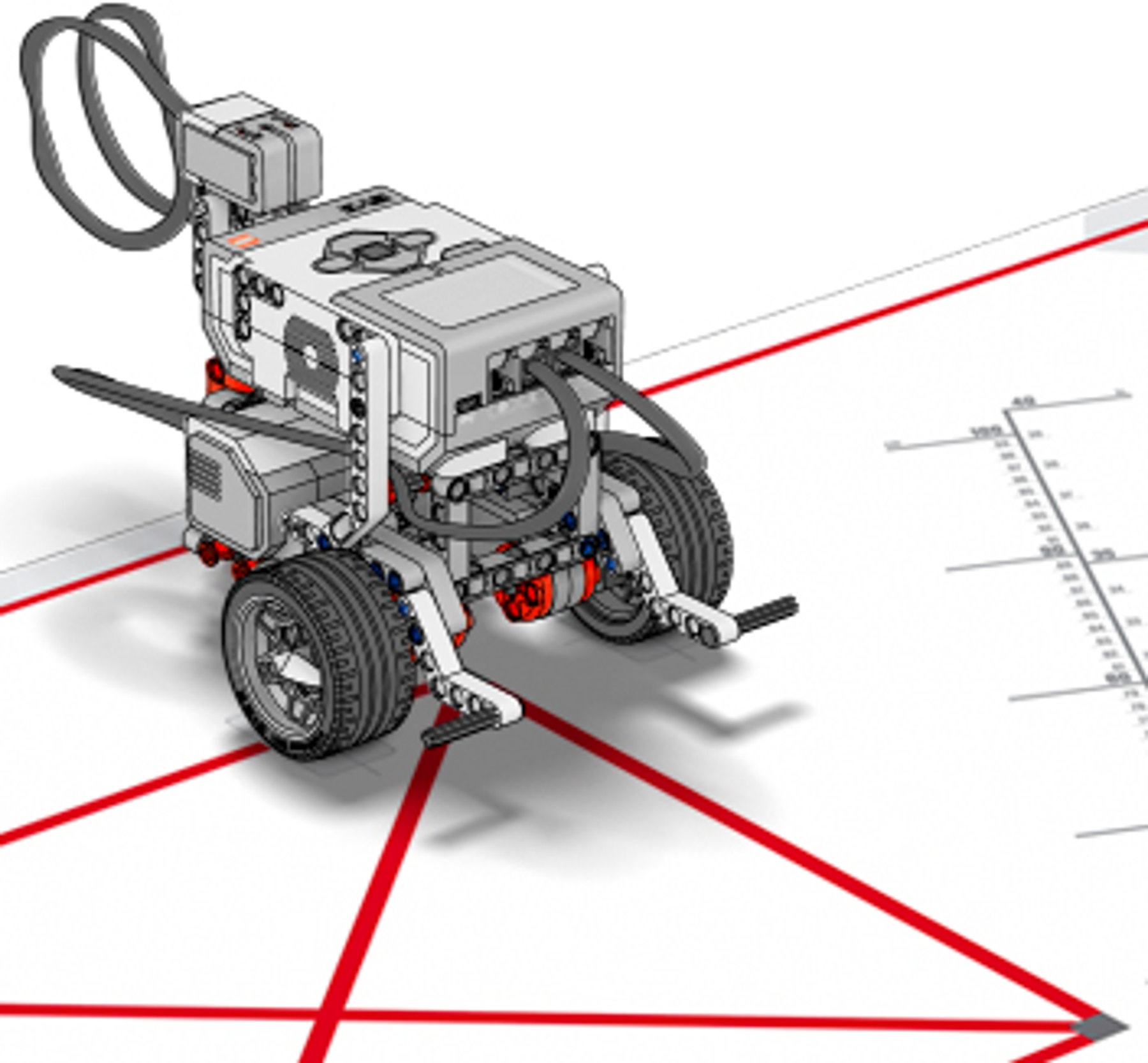
Wenn du bereit bist, kannst du dein Programm an Startposition 4 auf Übungsmatte 1 testen.

Lösung - Zusammenfassung des Programms
Start
Schleife - Zählen [4]
Standardlenkung – Winkel in Grad [682], Leistung [30]
Warten - Zeit in Sekunden [1]
Hebellenkung – Ein – Leistung B [10], Leistung C [-10]
Warten – Gyrosensor – Drehwinkel ändern – Richtung [0] (Erhöhen), Drehwinkel in Grad [85]
Hebellenkung – Aus
Warten - Zeit in Sekunden [1]
Problembehebung
Der Winkel muss angepasst werden – normalerweise muss der Wert unter 90 Grad liegen.
Erkläre hier, wofür eine Schleife benutzt werden kann:
Ich kann die Schleife verwenden, um Aktionen zu wiederholen.
Optional
Erstelle ein neues Programm, durch das sich dein Roboter in einem Dreieck bewegt. Wenn du bereit bist, kannst du dein Programm an Startposition 4 auf Matte 1 testen.
Programmiere deinen Roboter so, dass er sich in anderen Mustern bewegt.
Jetzt bist du in der Lage, den Gyrosensor für Drehungen zu benutzen. Gut gemacht!
Unterstützung für Lehrkräfte
Die Schülerinnen und Schülern lernen:
Naturwissenschaft und Technik
• Muster
• Ursache und Wirkung: Mechanismus und Erklärung
Mathematik
• Lösen realer und theoretischer Probleme mit Winkelmessung, Fläche, Oberfläche und Volumen
• Gesetzmäßigkeiten durch wiederholte Schlussfolgerungen finden und ausdrücken
Robotertechnik
• Bewegungskontrolle des Roboters mit dem Gyrosensor
• Verstehen des Unterschieds zwischen einfacher Ausgabe-Programmierung und sensorbasierter Programmierung
• Vorteile und Beschränkungen von Sensoren
LEGO® MINDSTORMS EV3 Set
EV3 Software oder Programmier-App
EV3 Ergänzungsset Weltraum-Expedition
Inhaltsbezogene Kompetenzen
NwT / NT
• Object mit Antrieb (Elektromotor)
• EVA-Prinzip
• Algorithmus programmieren
• zeitgesteuerter Prozess
Technik
• Fahrzeug konstruieren
• Aktoren ansteuern
AWT / AL
• Programmsteuerung realisieren
BNT
• mehrteiliges Objekt herstellen
• Antrieb nutzen
• technische Lösungen vergleichen
Informatik
• Roboter konstruieren
• Algorithmus programmieren
• Aktoren ansteuern




