Grab and Release
We need some motorized tools.
Motorized tools can be attached to robots to enable them to perform different tasks. Now it’s time to find the right tool for the job!
What motorized tools would your Driving Base need in order to move objects around?
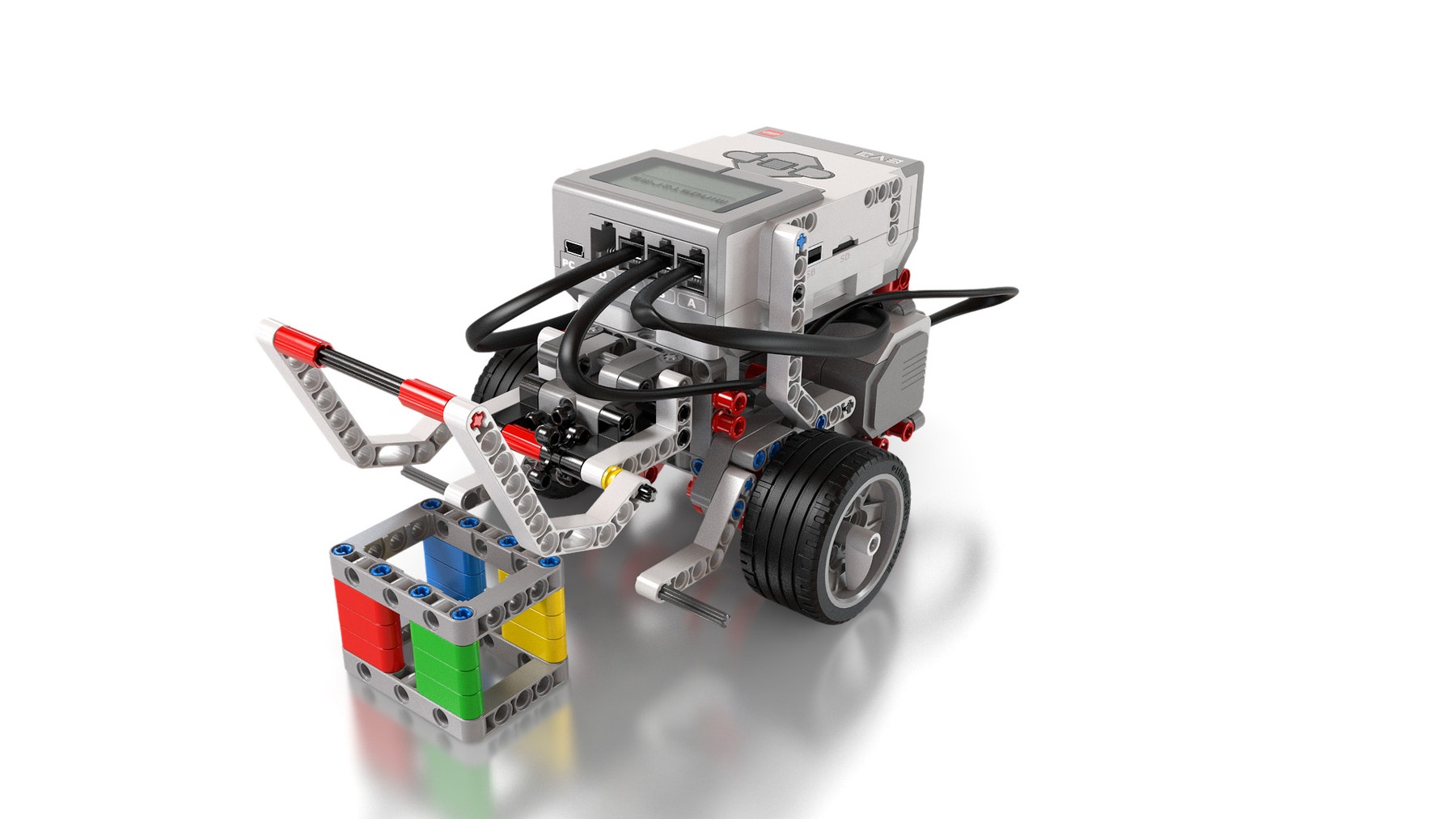
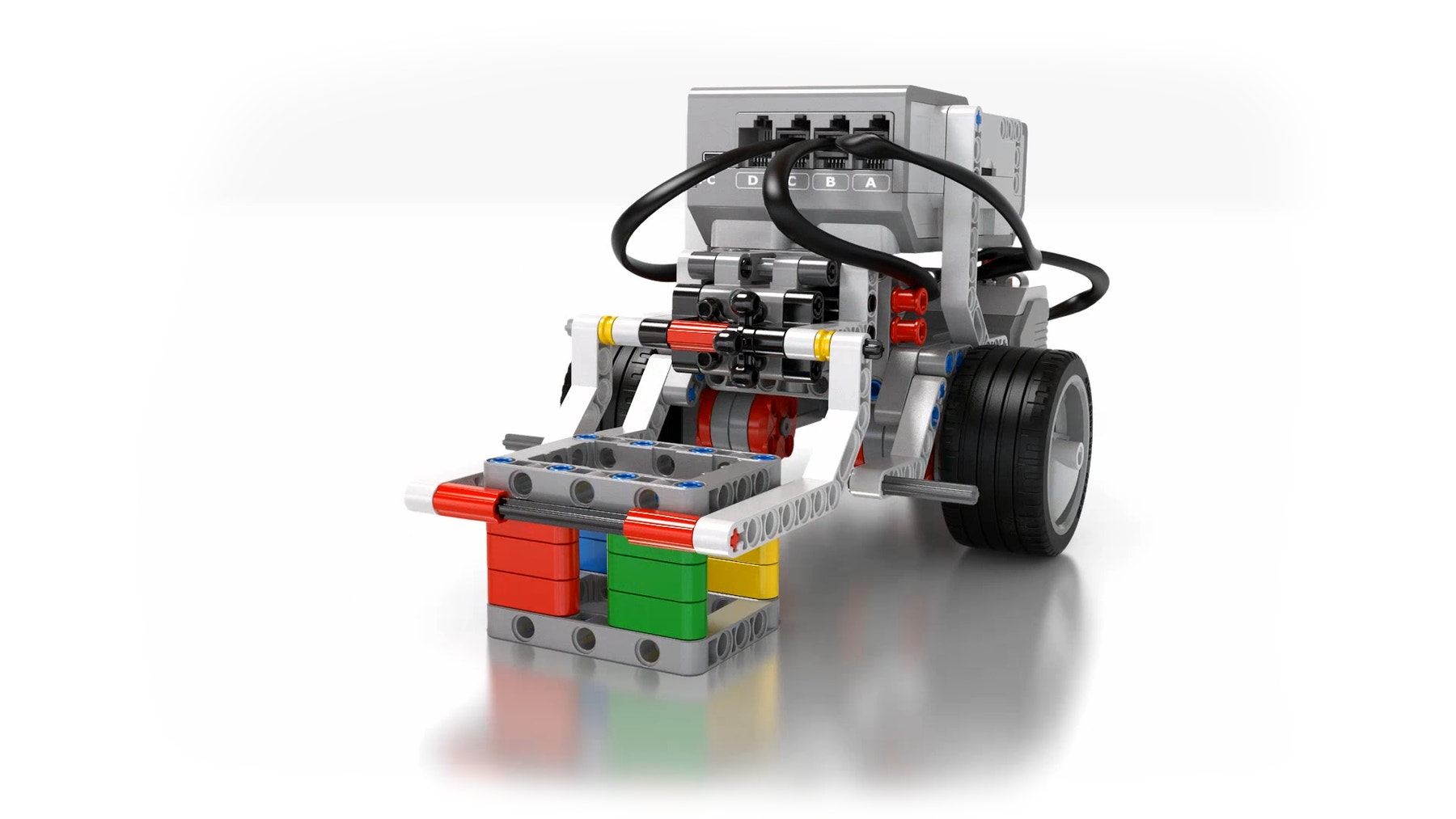
Build the Cuboid and these extensions.
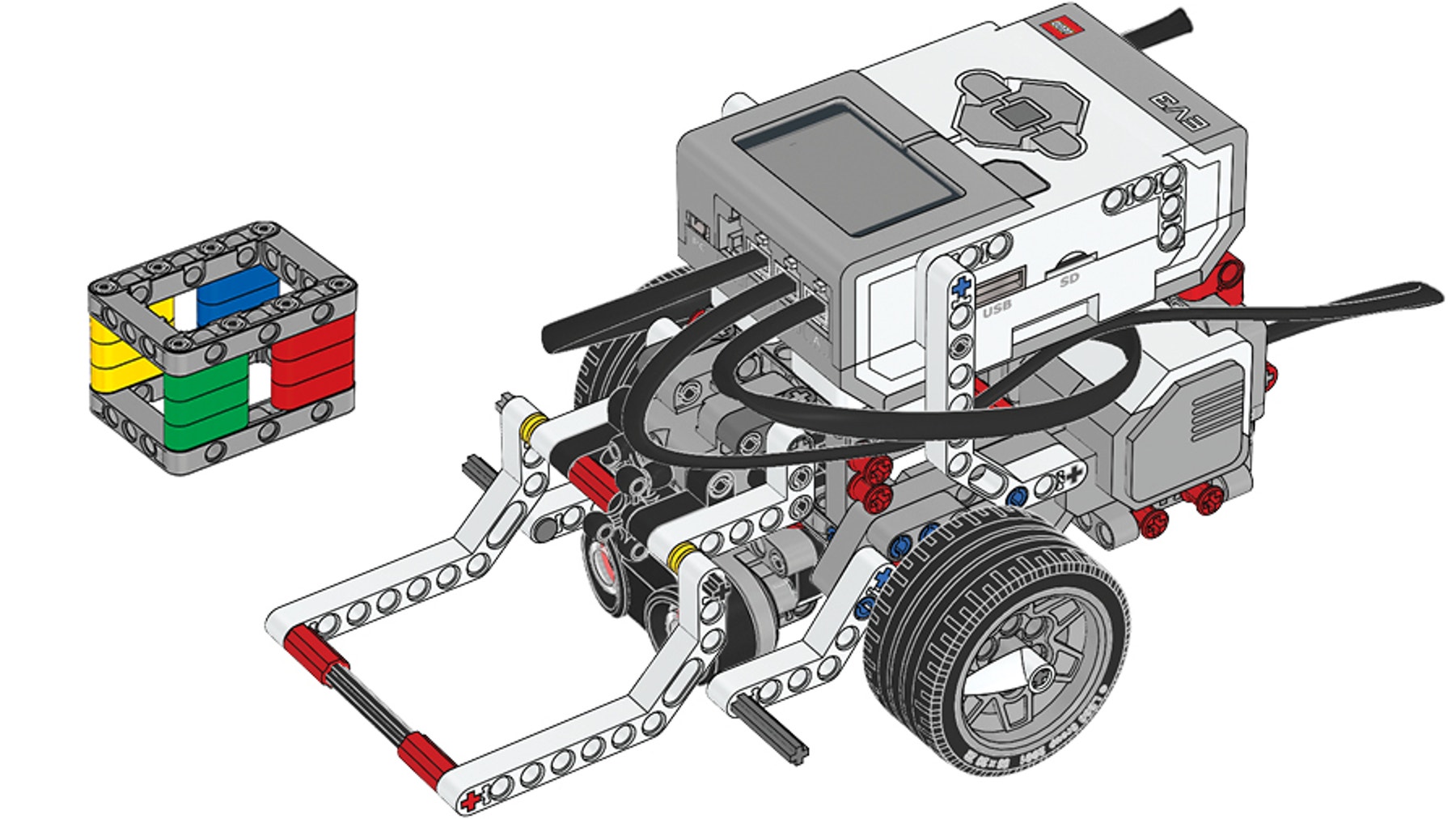
We’ll use the Medium Motor extension to grab and release the Cuboid. You’ll also need the Ultrasonic Sensor extension from the last lesson. Build the Cuboid, then build the extensions onto the Driving Base.
Try these programming stacks one after the other.

What do you see? Try placing the Cuboid in different positions.
What are the key features and limitations of the Medium Motor extension?
Your turn!
Use blocks from the programming stacks that are already on the Programming Canvas to create a program that grabs the Cuboid, drives forward for some rotations, releases the Cuboid, and finally reverses to drive back to its starting position.
It’s time for a challenge!

Program the Driving Base to use the Ultrasonic Sensor to stop near the Cuboid and then lower the arm to collect and return the Cuboid to its starting position.
How did you do?

What did you do well? Is there anything you could’ve done better?
You’ve got this! You can grab and release objects, moving them wherever you want.