Make a ‘Pick and Place’ Robot
Design, build and program a robotic system that can pick up an object from one location and place it in another location.

Lesson plan
Prepare
- Read through this teacher material.
- If you feel that it is necessary, plan a lesson using the getting started material in the EV3 Lab Software or EV3 Programming App. This will help to familiarise your pupils with LEGO® MINDSTORMS® Education EV3.
Engage (30 Min.)
- Use the ideas in the Ignite a Discussion section below to engage your pupils in a discussion relating to this project.
- Explain the project.
- Divide your class into teams of two pupils.
- Allow your pupils some time to brainstorm.
Explore (30 Min.)
- Have your pupils create multiple prototypes.
- Encourage them to explore both building and programming.
- Have each pair of pupils build and test two solutions.
- Provide them with a large sheet of graph paper and colouring pencils or felt tip pens.
Explain (60 Min.)
- Ask your pupils to test their solutions and to choose the best one.
- Make sure that they can create their own testing tables.
- Allow some time for each team to finalise their project and to collect assets for documenting their work.
Elaborate (60 Min.)
- Allow your pupils some time to produce their final reports.
- Facilitate a sharing session in which each team presents their results.
Evaluate
- Provide feedback on each pupil's performance.
- In order to simplify the process, you can use the assessment rubrics that have been provided.
Ignite a Discussion
Pick and place robots are a type of industrial robots that are able to move objects to and from predefined places. Based on the shape, weight and fragility of the objects, different types of grippers can be used to safely and precisely pick the objects up and release them again.
Encourage an active brainstorming process.
Ask your pupils to think about these questions:
- What is a pick and place robot and where is it used?
- Which type of motorised mechanism can be used to pick up the object?
- How can the robot move the object?
- How can the robot place the object in another location carefully and accurately?
Encourage your pupils to document their initial ideas and to explain why they chose the solution that they will use for their first prototype. Ask them to describe how they will evaluate their ideas throughout the project. That way, when they are reviewing and revising, they will have specific information that they can use to evaluate their solution and decide whether or not it was effective.
Extensions
Language Arts Extension
To incorporate the development of language arts, have your pupils:
Option 1
- Use their written work, sketches and/or photos to summarise their design process and create a final report
- Create a video demonstrating their design process starting with their initial ideas and ending with their completed project
- Create a presentation about their program
- Create a presentation that connects their project with real-world applications of similar systems and describes new inventions that could be made based on what they have created.
Option 2
To incorporate the development of language arts, have your pupils:
Research different machines that prepare medicines and vaccines, and then create a narrative related to working in an automated laboratory creating medicines, framing a benefit and a weakness of automated drug assembly
From the perspective of data protection, discuss the copyright concerns of potential billion-dollar drug ‘recipes’ being stored in an online system, considering:
The potential consequences of a company losing drug data
The benefits of storing sensitive information in online systems
Maths Extension
In this lesson, your pupils created a pick and place robot. As with many automated systems, assessing and improving performance is crucial. Machine learning is a process by which pick and place robots can measure their own performance and make modifications to maintain or improve that performance.
To incorporate the development of maths skills and explore machine learning, have your pupils:
- Define the terms accuracy and precision, and apply these definitions to their robotics projects
- Identify the variables that relate to accuracy and precision in their systems (e.g. the speed of their robot may impact its accuracy, precision or both)
- Set up mini-experiments to test whether their chosen variables impact accuracy, precision or both
Building Tips
Building Ideas
Allow your pupils the opportunity to build some of the examples from the links below. Encourage them to explore how these systems work and to brainstorm how these systems could inspire a solution to the Design Brief.
Testing Tips
Encourage your pupils to design their own test setup and a procedure for selecting the best solution. These tips can help your pupils as they set up their test:
- Mark the position of the machine on the graph paper to help ensure that you place it in the same position for each test run.
- Use gridlines to identify 1 cm x 1 cm squares to help in recording the results of each test run.
- Use colouring pencils or felt tip pens to mark the expected and actual locations in which the object will be placed.
- Create testing tables for recording your observations.
- Evaluate the precision of your robot by comparing the expected results with the actual results.
- Repeat the test at least three times.
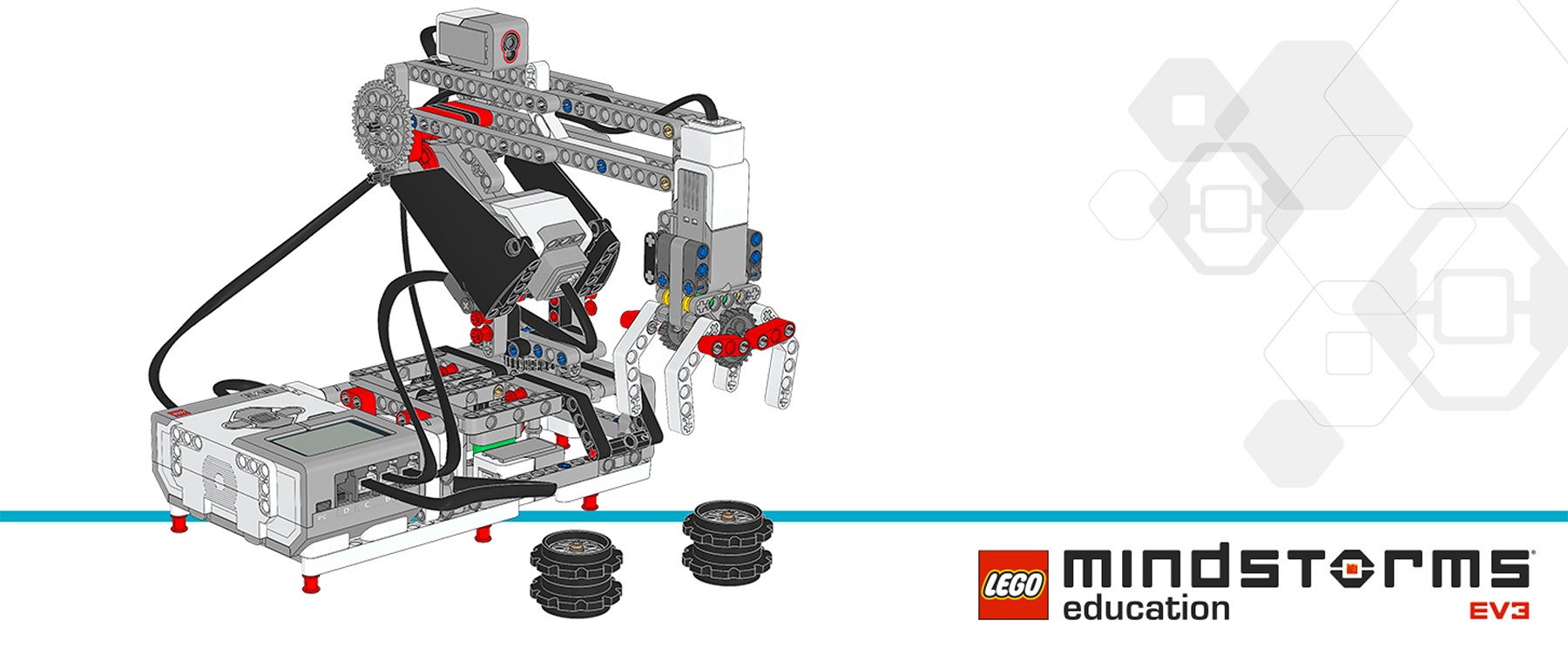
Sample Solution
Here is a sample solution that meets the Design Brief criteria:

Coding Tips
EV3 MicroPython Sample Program
#!/usr/bin/env pybricks-micropython
from pybricks import ev3brick as brick
from pybricks.ev3devices import Motor, TouchSensor, ColorSensor
from pybricks.parameters import (Port, Stop, Direction, Button,
ImageFile, SoundFile)
from pybricks.tools import wait
# Configure the gripper motor with default settings.
gripper_motor = Motor(Port.A)
# Configure the elbow motor. It has an 8-tooth and a 40-tooth gear
# connected to it. Set the motor direction to counterclockwise, so
# that positive speed values make the arm move upward.
elbow_motor = Motor(Port.B, Direction.COUNTERCLOCKWISE, [8, 40])
# Configure the motor that rotates the base. It has a 12-tooth and a
# 36-tooth gear connected to it. Set the motor direction to
# counterclockwise, so that positive speed values make the arm move
# away from the Touch Sensor.
base_motor = Motor(Port.C, Direction.COUNTERCLOCKWISE, [12, 36])
# Limit the elbow and base accelerations. This results in very smooth
# motion, like that of an industrial robot.
elbow_motor.set_run_settings(60, 120)
base_motor.set_run_settings(60, 120)
# Set up the Touch Sensor. It is used to detect when the base has
# moved to its starting position.
touch_sensor = TouchSensor(Port.S1)
# Set up the Color Sensor. It is used in Reflected Light Intensity
# Mode to detect the white beam when the elbow is in its starting
# position.
color_sensor = ColorSensor(Port.S3)
# Initialize the elbow. This is done by first moving down for 1 second
# and then slowly moving up until the Color Sensor detects the white
# beam. Then the motor stops, holds its position, and resets the angle
# to "0." This means that when it rotates backward to "0" later on, it
# returns to this starting position.
elbow_motor.run_time(-30, 1000)
elbow_motor.run(15)
while color_sensor.reflection() < 30:
wait(10)
elbow_motor.stop(Stop.HOLD)
elbow_motor.reset_angle(0)
# Initialize the base. This is done by first running the base motor
# counterclockwise until the Touch Sensor is pressed. Then the motor
# stops, holds its position, and resets the angle to "0." This means
# that when it rotates backward to "0" later on, it returns to this
# starting position.
base_motor.run(-60)
while not touch_sensor.pressed():
wait(10)
base_motor.stop(Stop.HOLD)
base_motor.reset_angle(0)
# Initialize the gripper. This is done by running the motor forward
# until it stalls. This means that it cannot move any further. From
# this closed gripper position, the motor rotates backward by 90
# degrees, so the gripper opens up. This is the starting position.
gripper_motor.run_until_stalled(200, Stop.COAST, 50)
gripper_motor.reset_angle(0)
gripper_motor.run_target(200, -90)
def robot_pick(position):
# This function rotates the base to the pick up position. There,
# it lowers the arm, closes the gripper, and raises the arm to pick
# up the wheel stack.
base_motor.run_target(60, position, Stop.HOLD)
elbow_motor.run_target(60, -45)
gripper_motor.run_until_stalled(200, Stop.HOLD, 50)
elbow_motor.run_target(60, 0, Stop.HOLD)
def robot_release(position):
# This function rotates the base to the drop-off position. There,
# it lowers the arm, opens the gripper to release the wheel stack,
# and raises the arm again.
base_motor.run_target(60, position, Stop.HOLD)
elbow_motor.run_target(60, -45)
gripper_motor.run_target(200, -90)
elbow_motor.run_target(60, 0, Stop.HOLD)
# Define the 3 destinations for picking up and dropping off the wheel
# stacks.
LEFT = 200
CENTER = 100
RIGHT = 0
# Rotate the base to the center.
base_motor.run_target(60, CENTER, Stop.HOLD)
# This is the main part of the program. It is a loop that repeats
# endlessly.
#
# First, the robot waits until the Up or Down Button is pressed.
# Second, the robot waits until the Center Button is pressed.
# Finally, the robot picks up the wheel stack and drops it off in the
# center.
#
# Then the process starts over, so the robot can pick up another wheel
# stack.
while True:
# Display a question mark to indicate that the robot should await
# instructions.
brick.display.image(ImageFile.QUESTION_MARK)
# Wait until the Up or Down Button is pressed.
while True:
# First, wait until any button is pressed.
while not any(brick.buttons()):
wait(10)
# Then store which button was pressed.
button = brick.buttons()[0]
# If the Up or Down Button was pressed, break out of the loop.
if button in (Button.UP, Button.DOWN):
break
# Play a sound and display an arrow to show where the arm will move.
brick.sound.file(SoundFile.AIR_RELEASE)
if button == Button.UP:
brick.display.image(ImageFile.FORWARD)
elif button == Button.DOWN:
brick.display.image(ImageFile.BACKWARD)
# Wait until the Center Button is pressed, then display a check
# mark to indicate that the instruction has been accepted.
while not Button.CENTER in brick.buttons():
wait(10)
brick.display.image(ImageFile.ACCEPT)
# Pick up the wheel stack. Depending on which button was pressed,
# move left or right.
if button == Button.UP:
robot_pick(RIGHT)
elif button == Button.DOWN:
robot_pick(LEFT)
# Drop off the wheel stack in the center.
robot_release(CENTER)
Career Links
The pupils who enjoyed this lesson might be interested in exploring these career pathways:
- Information Technology (Computer Programming)
- Manufacturing and Engineering (Machine Technology)
Assessment Opportunities
Teacher Observation Checklist
Create a scale that suits your needs, for example:
- Partially accomplished
- Fully accomplished
- Overachieved
Use the following success criteria to evaluate your pupils' progress:
- The pupils are able to evaluate competing design solutions based on prioritised criteria and trade-off considerations.
- The pupils are autonomous in developing a working and creative solution.
- The pupils are able to communicate their ideas clearly.
Self-Assessment
Once your pupils have collected some performance data, allow them a bit of time to reflect on their solutions. Help them by asking questions, like:
- Is your solution meeting the Design Brief criteria?
- Can your robot’s movement(s) be more accurate?
- What are some ways in which others have solved this problem?
Ask your pupils to brainstorm and document two ways in which they could improve their solutions.
Peer Feedback
Encourage a peer-review process in which each group is responsible for evaluating their own as well as others’ projects. This review process can help the pupils to develop skills in giving constructive feedback as well as sharpen their analytic skills and their ability to use objective data in order to support an argument.
Teacher Support
The pupils will:
-Use the design process to solve a real-world problem
LEGO® MINDSTORMS® Education EV3 Core Set
Large sheet of graph paper or paper that has been pre-printed with gridlines
Colouring pencils or felt tip pens
National curriculum in England
Design and technology programmes of study: key stage 3 (DFE-00192-2013)
• identify and solve their own design problems and understand how to reformulate problems given to them
• test, evaluate and refine their ideas and products against a specification, taking into account the views of intended users and other interested groups
• develop and communicate design ideas using annotated sketches, detailed plans, 3-D and mathematical modelling, oral and digital presentations and computer-based tools
• understand how more advanced electrical and electronic systems can be powered and used in their products [for example, circuits with heat, light, sound and movement as inputs and outputs]
• apply computing and use electronics to embed intelligence in products that respond to inputs [for example, sensors], and control outputs [for example, actuators], using programmable components [for example, microcontrollers].




