Trial and Error
What’s good enough?
No machine is perfect. Engineers do their best to make them as precise and accurate as possible, but there will always be some degree of error.
What factors determine the acceptable amount of error?
Build this *Bevel Bot*.
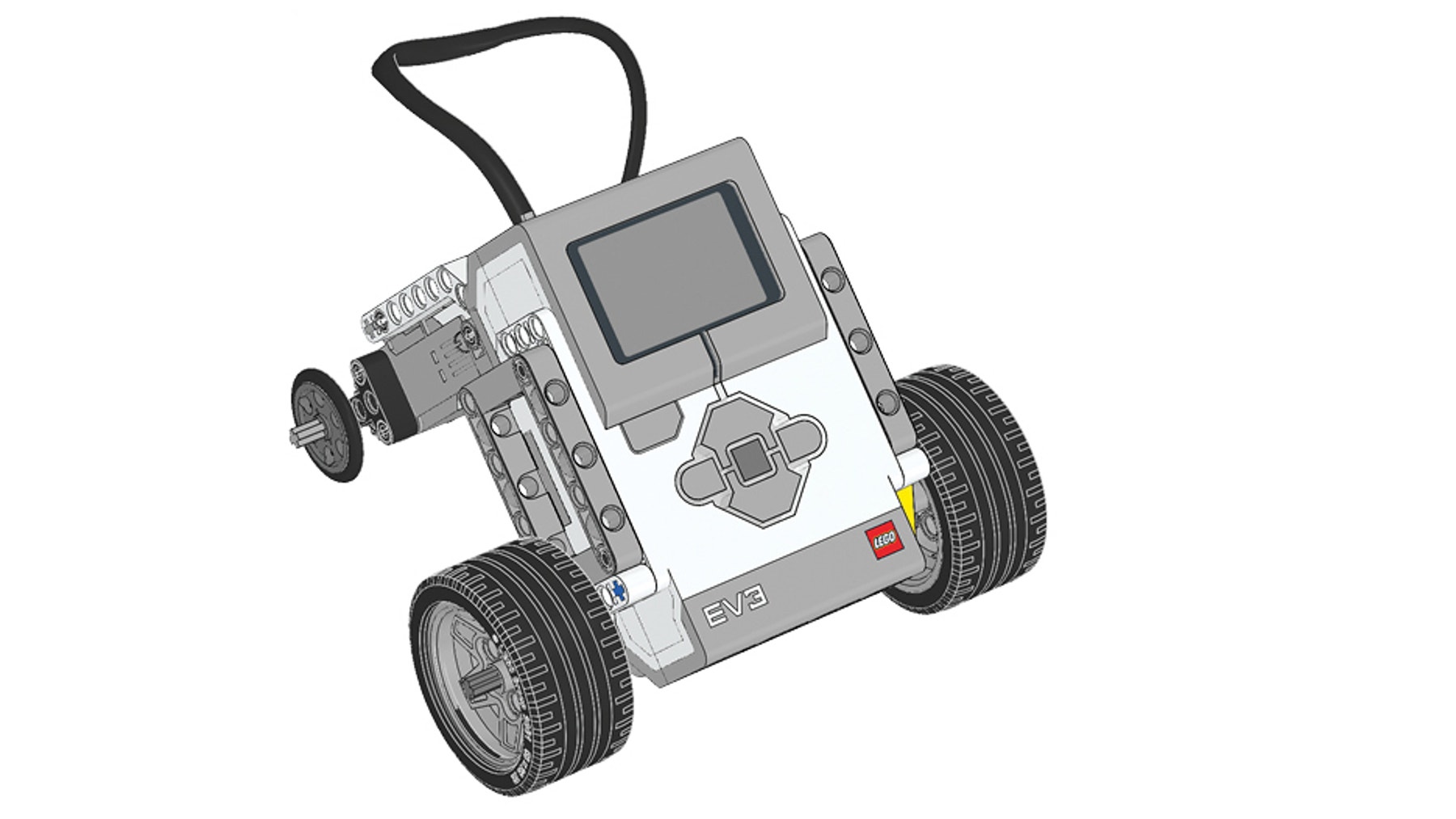
It will help you investigate which aspects of its design and program can cause inaccuracies.
Do a test run.


Place the model on a solid and level surface and mark its starting position. Run the program and mark its finishing position once it has stopped moving.
Does the Bevel Bot move 100 cm? Are the calculated motor rotations, the actual motor rotations and the calculated distance travelled (in cm) displayed?
Record your results.
Record the experiment number, calculated distance travelled and measured distance travelled in a testing table. Make sure you leave enough space to add more columns for further calculations.
Perform the experiment using the default model and program. Repeat the experiment for each adjustment you make to determine its effect.
Running the Experiment
Keep the following tips in mind as you run your experiment:
- The calculated motor rotations, the actual motor rotations and the calculated distance travelled (in cm) will be shown on the Display.
- Perform the experiment at least three times. Use the average value to ensure the most reliable results.
Summarise your results.
Use the average measured distance travelled for each of the adjustments that you’ve made and calculate the error to identify which version was the most accurate.
Which adjustments to the robot’s design and program had the most significant impact on its accuracy?
How did you do?

What did you do well? Is there anything that you could have done better?
Brilliant! Now you know how to improve a robot’s accuracy. Let’s move on to the next lesson.