Objects and Obstacles
The Driving Base is a modular robotic platform.

It can be extended and reconfigured as needed. Adding sensors enables it to react to its environment so it can do things like detect obstacles and avoid collisions.
Do you know of any robots that can detect objects?
Build the Cuboid and this extension.
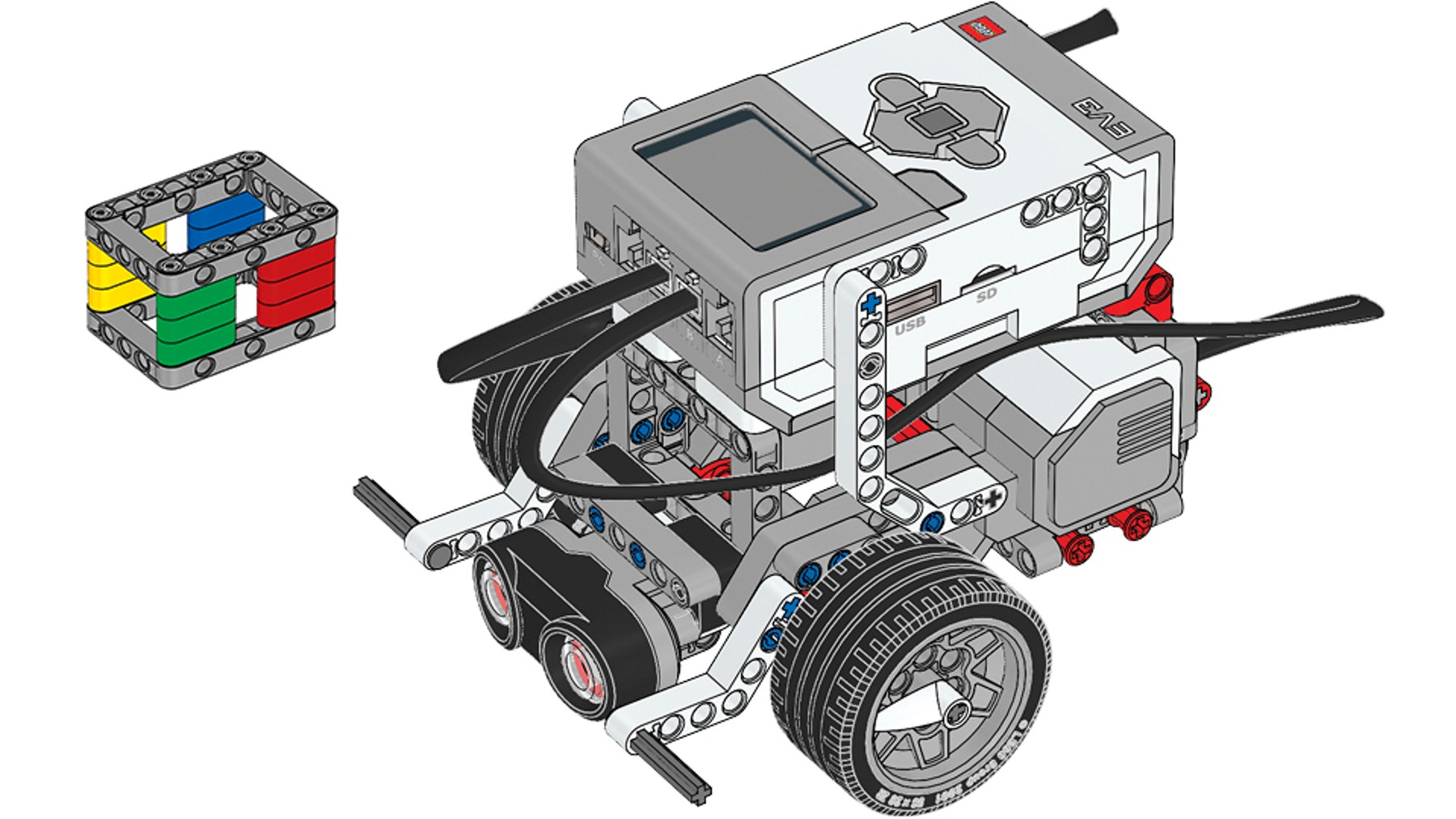
You’ll need the Ultrasonic Sensor extension in order to detect objects and obstacles. Build the Cuboid, then build the extension onto the Driving Base.
Try these programming stacks one after the other.

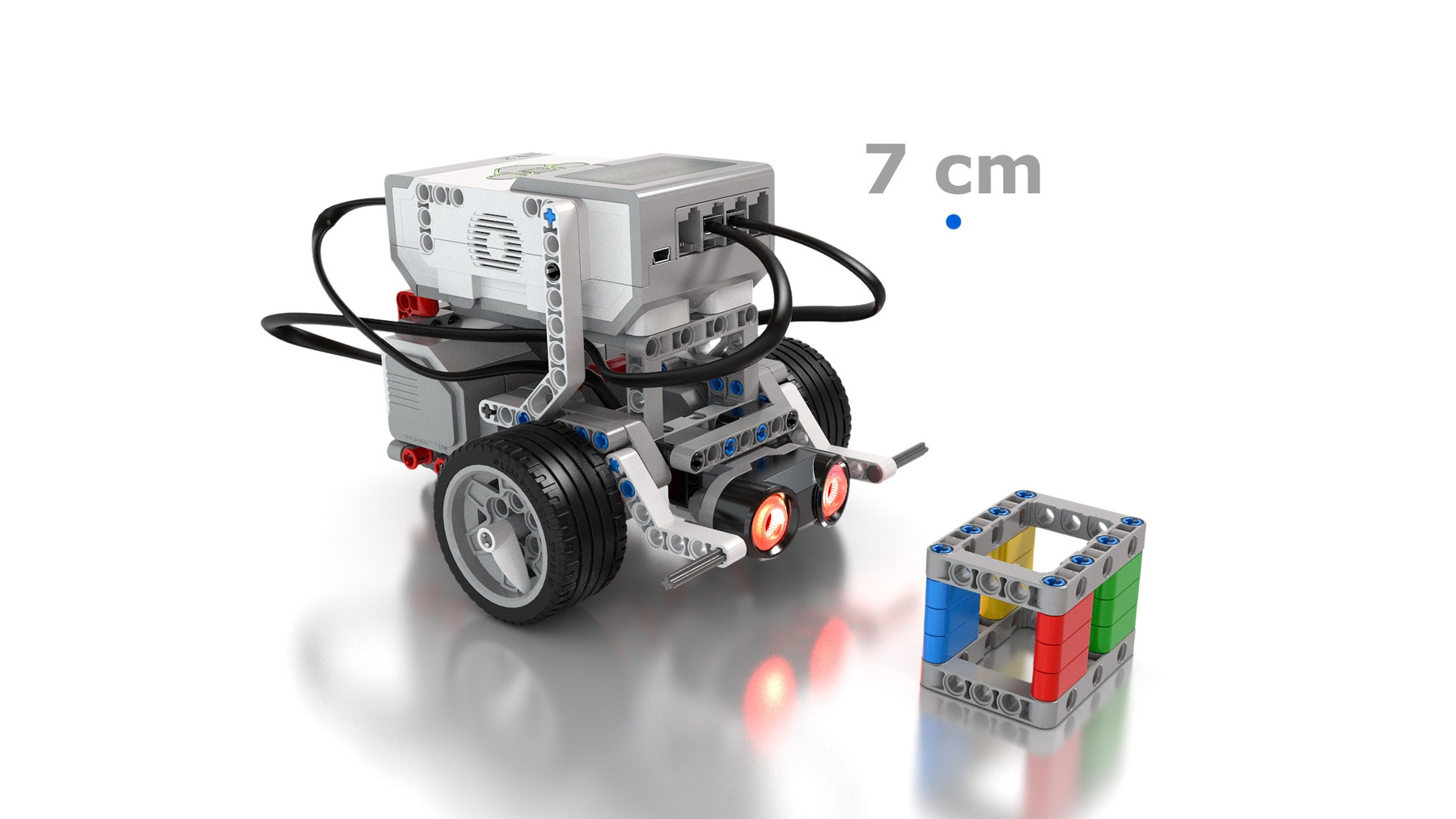
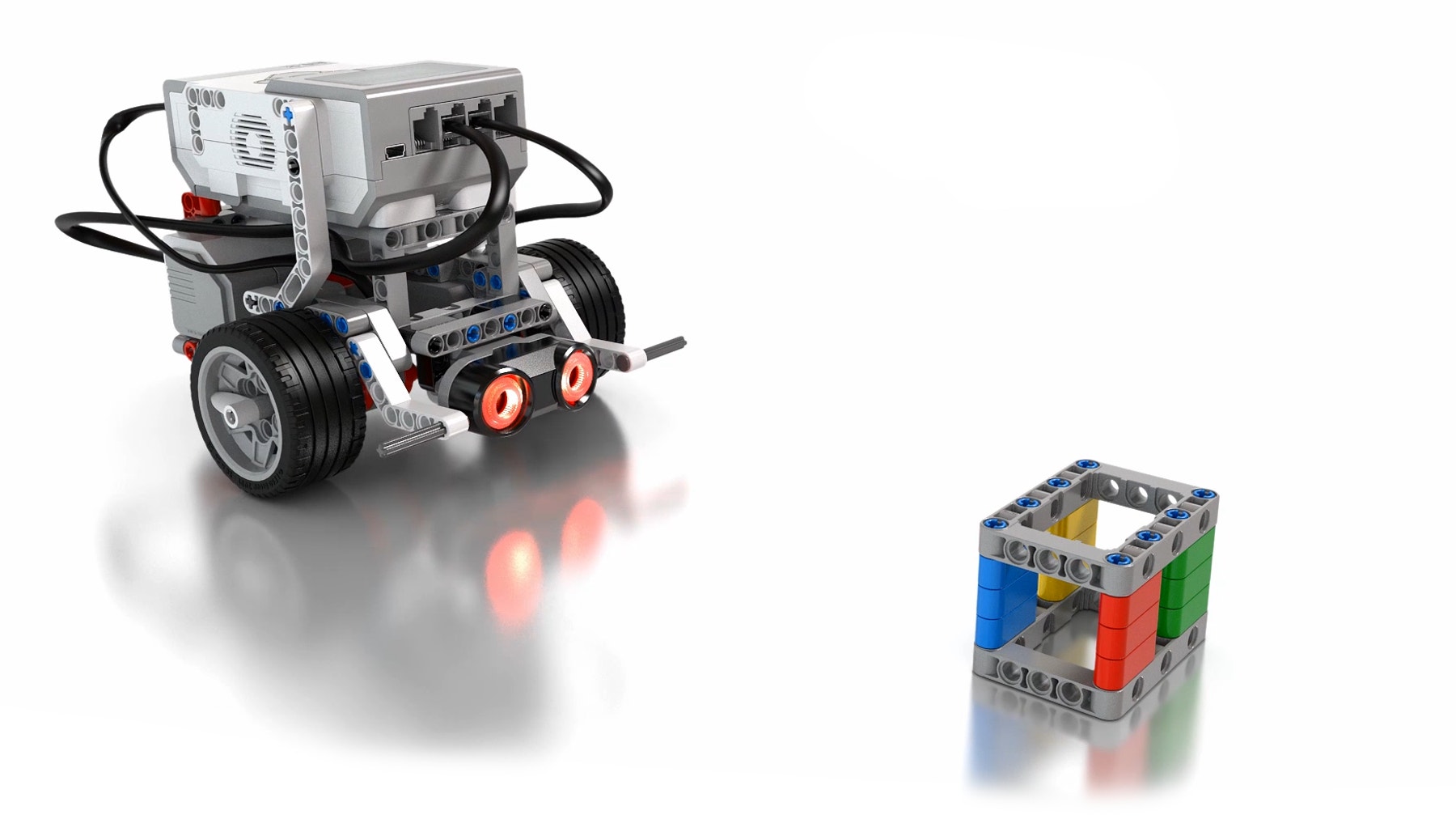
What do you see? Try placing the Cuboid in different positions.
In what situations could you use the Ultrasonic Sensor to measure distance?
Your turn!

Use blocks from the programming stacks that are already on the Programming Canvas to create a program that reacts to two different distances to the Cuboid.
It’s time for a challenge!
Program the Driving Base to beep faster or louder as it gets closer to the Cuboid.
How did you do?
What did you do well? Is there anything you could’ve done better?
Safety first! Now you can detect any obstacles in your path and react to them.