Girar con sensor
Tu misión es la de programar tu robot para que complete un punto de giro con un ángulo exacto utilizando el girosensor.
Paso a paso
- Construye tu robot.
- Crea tu programa.
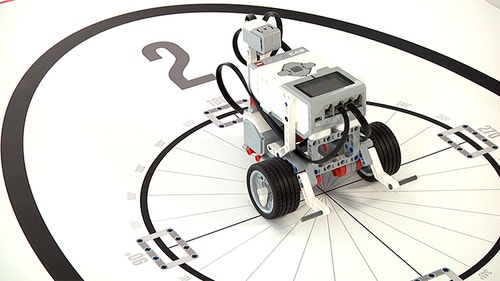
- Coloca el robot en la posición 2 del tablero 2 y ejecuta el programa.
- Documenta tus descubrimientos.
- Continúa aprendiendo más acerca del uso del girosensor para controlar los movimientos de tu robot.
Antes de comenzar la misión, quizá quieras revisar estos tutoriales del Robot Educator:
- Detener en ángulo
- Bucle
Durante esta misión, los estudiantes explorarán la relación entre la entrada de un sensor y el comportamiento del robot. El girosensor controlará las rotaciones de la base motriz.
Observe a los estudiantes para determinar si ellos
Usan la terminología correcta;
Reconocen la función de los bloques de programación;
Encuentren buenas formas de probar el ángulo de giro de su robot; y
Comprendan qué factores podrían afectar la precisión al detenerse el robot cuando usan un girosensor (tolerancia del sensor, inactividad del motor y el momento rotacional).
Conectar
(5 minutos)
Rotar usando una rueda no es muy preciso. Si intentas girar tu robot en el polvo o en una superficie resbalosa, es probable que no alcance el ángulo correcto. Lo que hace el girosensor es ayudar a tu robot a hacer movimientos mucho más precisos.
Tu misión es la de programar tu robot para que complete un punto de giro con un ángulo exacto utilizando el girosensor.
Construir
(20 minutos)
Construye tu robot
Haz clic en los siguientes enlaces para abrir las instrucciones para la construcción y, luego, construye el modelo y regresa a este proyecto para continuar. Salta este paso si el modelo ya está construido.
IMPORTANTE:
Mantén el girosensor y el Bloque EV3 firmes cuando conectes el cable y durante el inicio del Bloque EV3.
Crea tu programa
Recrea el siguiente programa y luego descárgalo a tu robot.

Programa de ejemplo
Inicio
Mover tanque: Potencia B[10], Potencia C[-10]
Esperar: Girosensor: Comparar Ángulo: Tipo[3] (Mayor que o Igual a), Grados [90]
Mover tanque: Apagado
Resolución de problemas
El ángulo necesita un ajuste: por lo general el valor debe ser inferior a 90 grados.
Teoría
Al usar el girosensor, el valor de rotación escrito en el bloque del sensor corresponde a la rotación de la base motriz. La precisión del sensor es de +/- 3 grados.
La inactividad del motor y la demora causada por la detención del momento rotacional también puede afectar la precisión.
La potencia de la batería,el tamaño de las ruedas, la fricción del robot en la superficie y la distancia entre las dos ruedas ya no son factores que puedan influir en la precisión de rotación del robot.
Observar
(20 Minutos)
Ejecuta tu programa y observa.
Coloca tu robot en la posición de inicio 2 del tablero 2 y ejecuta tu programa.
Documenta tus descubrimientos
- Describe aquí qué hizo cada uno de tus bloques de programación:
Mi robot giro en un punto hasta que el girosensor obtuvo el valor de 90 grados y se detuvo. - Estima el ángulo de rotación de tu robot:
Mi robot giró aproximadamente 90 grados. - Explica la diferencia entre la rotación de tu robot con y sin el girosensor:
La rotación que controla el girosensor está vinculada a menos factores de duda.
Contemplar y modificar
Reconstruye tu programa para que el robot haga los siguientes giros en un punto:
- en el sentido de las agujas del reloj de 45 grados.
- en el sentido de las agujas del reloj de 180 grados.
- en el sentido de las agujas del reloj de seguido de 360 grados y otro en sentido contrario 360 grados.
¿Cuánto giró tu robot en comparación a lo que el programa le ordenaba?
Por lo general, rotaba más debido al momento rotacional.
Tarea
Gira tu robot 45 grados en sentido de las agujas del reloj.

Solución - Resumen del programa
Inicio
Mover tanque: Potencia B[10], Potencia C[-10]
Esperar: Girosensor: Comparar Ángulo: Tipo[3] (Mayor que o Igual a), Grados [45]
Mover tanque: Apagado
Resolución de problemas
El ángulo necesita un ajuste: por lo general el valor debe ser inferior a 45 grados.
Tarea
Gira tu robot 180 grados en sentido de las agujas del reloj.

Solución - Resumen del programa
Inicio
Mover tanque: Potencia B[10], Potencia C[-10]
Esperar: Girosensor: Comparar Ángulo: Tipo[3] (Mayor que o Igual a), Grados [180]
Mover tanque: Apagado
Resolución de problemas
El ángulo necesita un ajuste: por lo general el valor debe ser inferior a 180 grados.
Tarea
Haz que tu robot dé un giro en el sentido de las agujas del reloj de 360 grados y otro giro en un punto en sentido contrario de 360 grados.

Solución - Resumen del programa
Inicio
Mover tanque: Potencia B[10], Potencia C[-10]
Esperar: Girosensor: Comparar Ángulo: Tipo[3] (Mayor que o Igual a), Grados [360]
Mover tanque: Apagado
Esperar: Segundos[2]
Mover tanque: Potencia B[10], Potencia C[-10]
Esperar: Girosensor: Comparar Ángulo: Tipo[5] (Menor que o Igual a), Grados [0]
Mover tanque: Apagado
Continuar
(15 Minutos)
Continuar explorando
Crea un nuevo programa con un Bucle para hacer que tu robot haga un recorrido con forma de cuadrado.
Cuando estés listo, prueba tu programa en la posición de inicio 4 en el tablero de aprendizaje 1.

Solución - Resumen del programa
Inicio
Bucle: Cuenta[4]
Mover la dirección: Grados[682], Potencia[30]
Esperar: Tiempo [1 s]
Mover tanque: Encendido, Potencia B[10], Potencia C[-10]
Esperar: Girosensor: Cambiar Ángulo: Dirección[0] (Aumentar), Grados [85]
Mover tanque: Apagado
Esperar: Tiempo [1 s]
Resolución de problemas
El ángulo necesita un ajuste: por lo general el valor debe ser inferior a 90 grados.
Explica aquí para qué puede usarse un Bucle:
Puedo usar la estructura Bucle para repetir acciones.
Opcional
1.Crea un nuevo programa que haga que tu robot recorra la forma de un triángulo. Cuando estés listo, prueba tu programa en la posición de inicio 4 en el tablero 1.
2.Programa tu robot para que recorra otras formas.

Ahora puedes usar el girosensor para hacer giros. ¡Bien hecho!
Apoyo docente
Objetivos de aprendizaje:
Ciencia e ingeniería:
• Patrones
• Causa y efecto: mecanismo y explicación
Matemáticas:
• Resolver problemas matemáticos y de la vida real que incluyan medición de ángulos, área, superficie y volumen.
• Buscar y expresar regularidades en el razonamiento repetitivo.
Aprendizaje de robótica:
• Control de movimiento del robot con el girosensor.
• Comprender la diferencia entre programación de salida pura y programación basada en sensores.
• Ventajas y limitaciones de los sensores.
Set principal de LEGO MINDSTORMS EV3
Laboratorio EV3 o Programación EV3
Set Desafío espacial EV3




