Prueba y error
¿Cuál es suficientemente buena?
Ninguna máquina es perfecta. Los ingenieros dan lo mejor de sí para hacerlas lo más precisas y exactas que sea posible, pero siempre hay un grado de error.
¿Qué factores determinan la cantidad de errores que es aceptable?
Construye este *Robot biselado*.
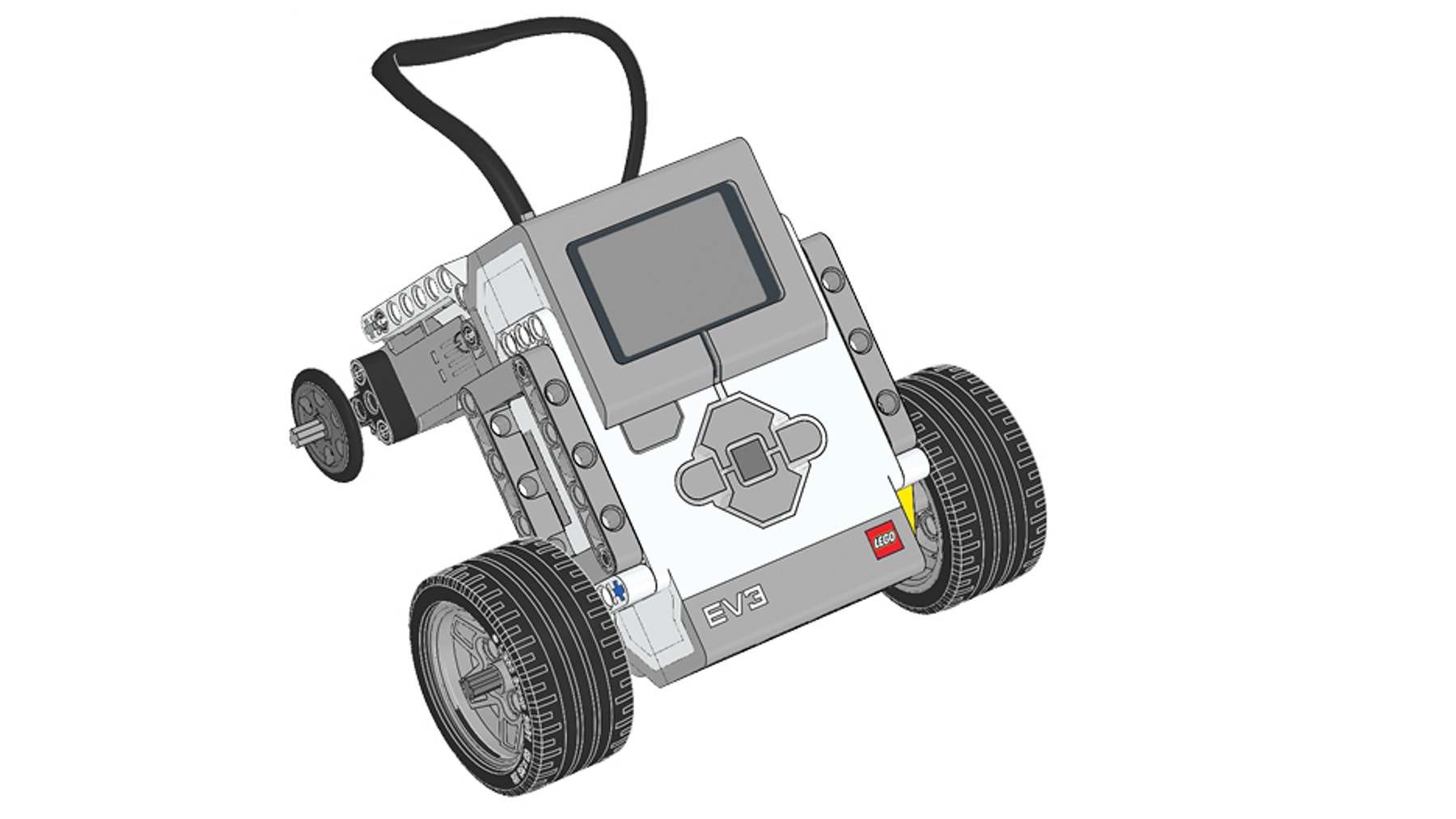
Esto te ayudará a investigar qué aspectos de su diseño y del programa pueden causar errores.
Haz una prueba.


Coloca el modelo en una superficie sólida y nivelada; marca su posición inicial. Ejecuta el programa y marca la posición donde se encuentre tu robot al finalizar el programa, es decir, cuando se detenga.
¿El robot biselado se mueve 100 cm? ¿Se muestran las rotaciones calculadas del motor, las rotaciones reales del motor y la distancia recorrida que se calculó?
Registra tus resultados.

Registra la cantidad de experimentos, la distancia recorrida que se calculó y la distancia recorrida en la tabla de pruebas. Asegúrate de dejar suficiente espacio en columnas adicionales para otros cálculos.
Haz el experimento con el modelo y el programa predeterminados. Repite el experimento con diferentes ajustes para determinar y registrar su efecto.
Ejecución del experimento
Toma en cuenta los siguientes consejos al ejecutar el experimento:
- Las rotaciones calculadas del motor, las rotaciones reales del motor y la distancia calculada recorrida (en cm) se mostrarán en la pantalla.
- Realiza el experimento al menos tres veces y utiliza los valores medios para garantizar los resultados.
Haz un resumen de tus resultados.
Usa la distancia promedio recorrida para cada uno de los ajustes que hayan hecho y calcula el error para identificar la versión más precisa.
¿Qué ajustes al diseño o al programa del robot tuvo mayor impacto en su precisión?
¿Cómo te fue?
¿Qué hicieron bien? ¿Hay algo que pudieron haber hecho mejor?
¡Asombroso! Ahora ya sabes cómo mejorar la exactitud de un robot. Pasemos a la siguiente sesión.