Agarrar y soltar
Necesitamos algunas herramientas motorizadas.
Las herramientas motorizadas se pueden fijar a los robots para permitirles realizar diferentes tareas. ¡Este es el momento de encontrar la herramienta adecuada para el trabajo!
¿Qué herramientas motorizadas necesitaría tu Base motriz para poder mover objetos?
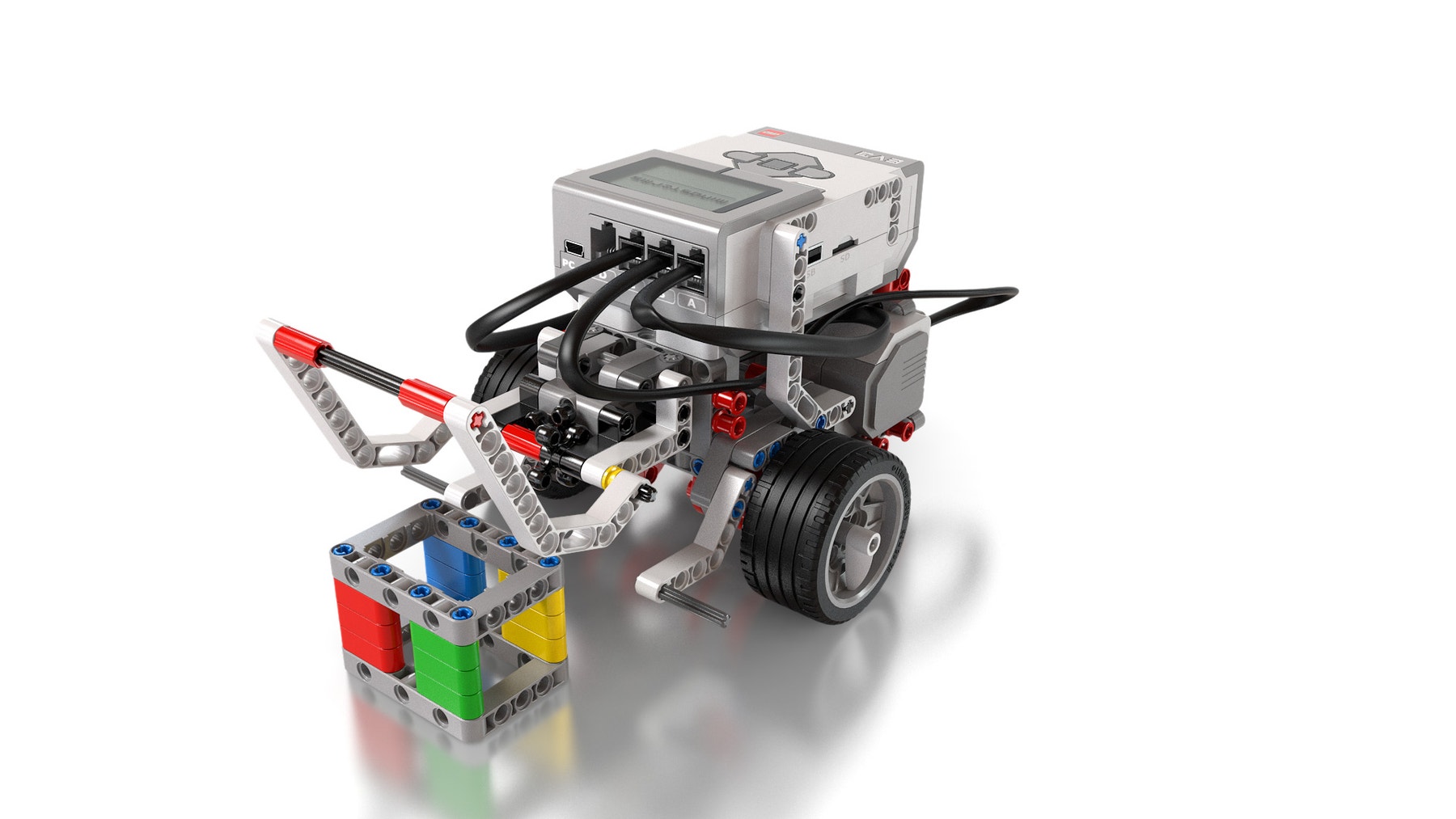
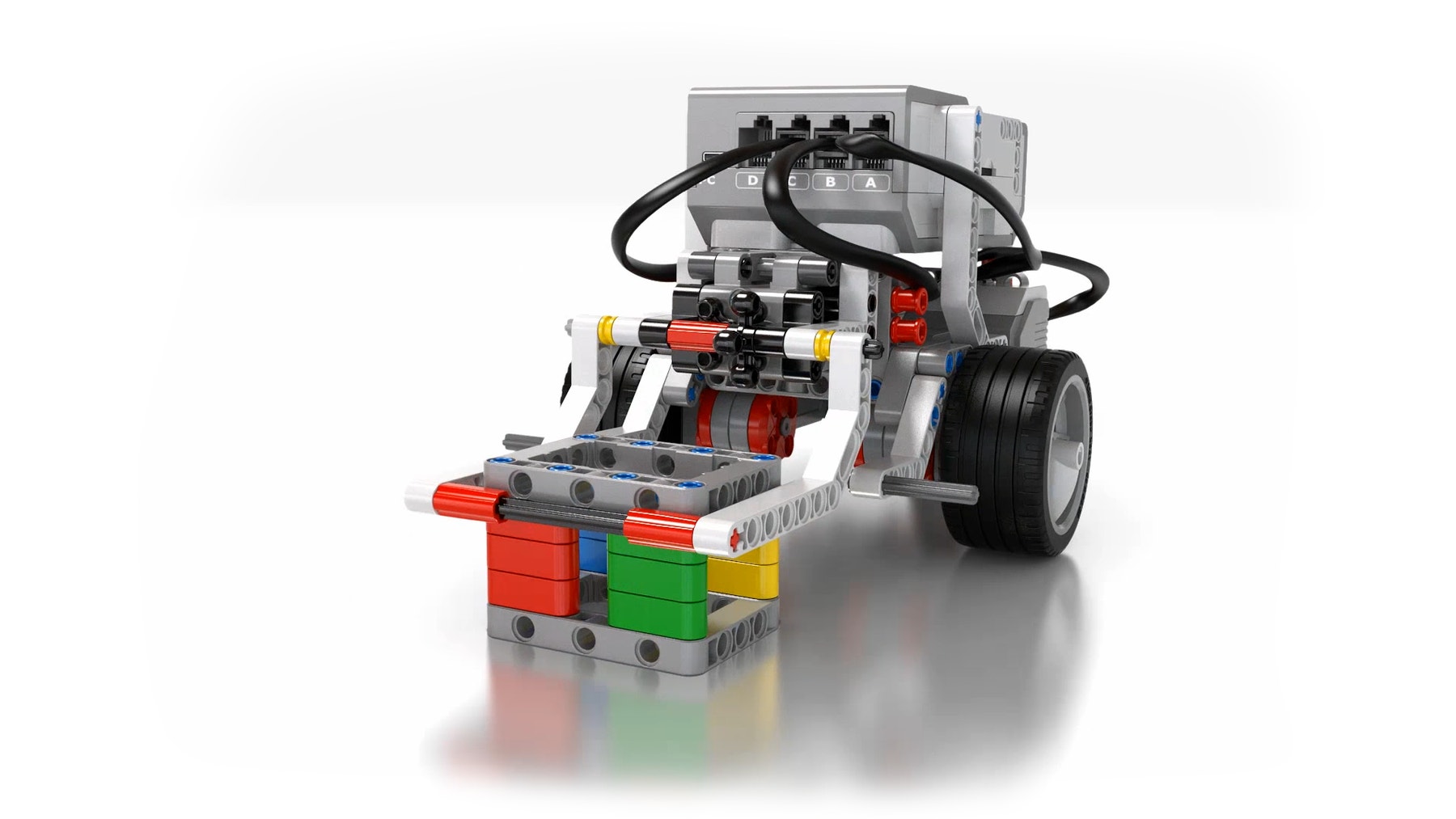
Construye el Cubo y estas extensiones.
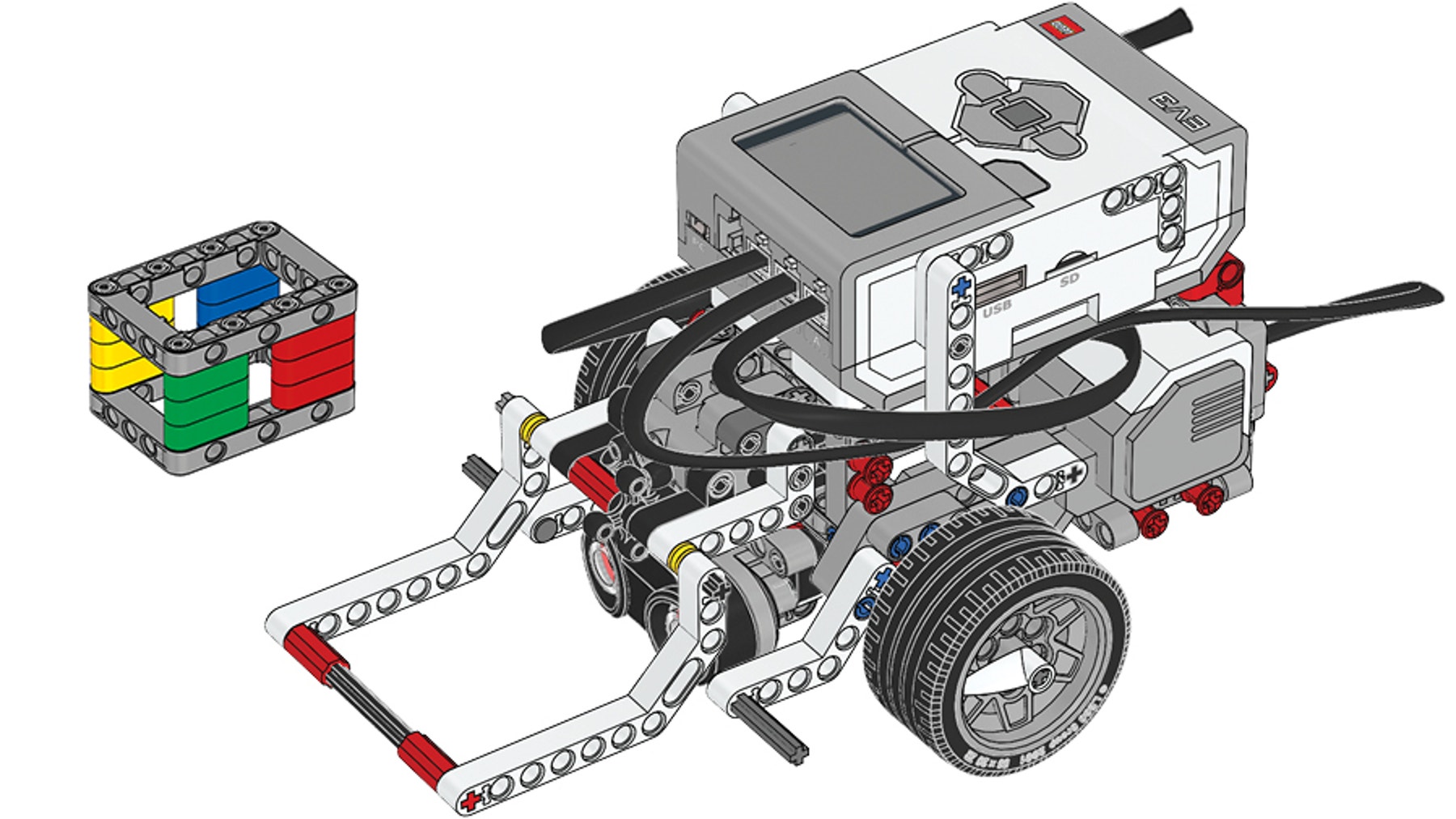
Usaremos la extensión de Motor mediano para agarrar y soltar el Cubo. También necesitarás la extensión del Sensor ultrasónico de la sesión anterior. Construye el Cubo y luego construye la extensión sobre la Base motriz.
Prueba esta programación una tras otra, por bloques.

¿Qué ves? Intenta colocar el cubo en diferentes posiciones.
¿Cuáles son las principales funciones y limitaciones de la extensión del Motor mediano?
¡Tu turno!
Utiliza bloques de la programación que ya están en el Área de documento de programación para crear un programa que agarre el Cubo, conduzca hacia adelante por algunas rotaciones, que suelte el cubo y, por último, que se mueva hacia atrás para volver a su posición inicial.
¡Es hora de un desafío!

Programa la Base motriz de modo que use el Sensor ultrasónico para detenerse cerca del Cubo y luego baje el brazo para recoger y devolver el Cubo a su posición inicial.
¿Cómo te fue?

¿Qué hiciste bien? ¿Hay algo que pudiste haber hecho mejor?
¡Ya sabes cómo! Puedes agarrar, soltar objetos y moverlos a donde quieras.