Interruptor
Utiliza el bloque Interruptor para tomar decisiones basadas en los sensores dinámicos.
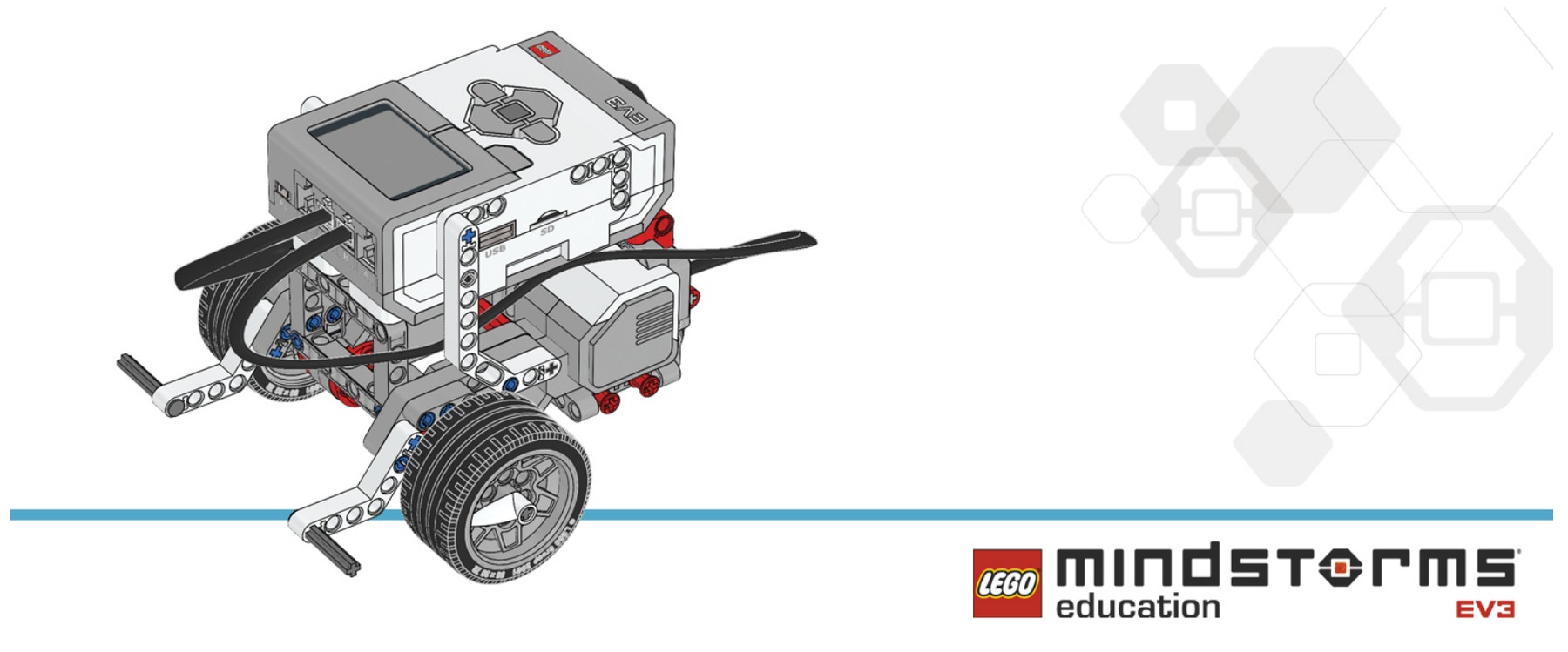
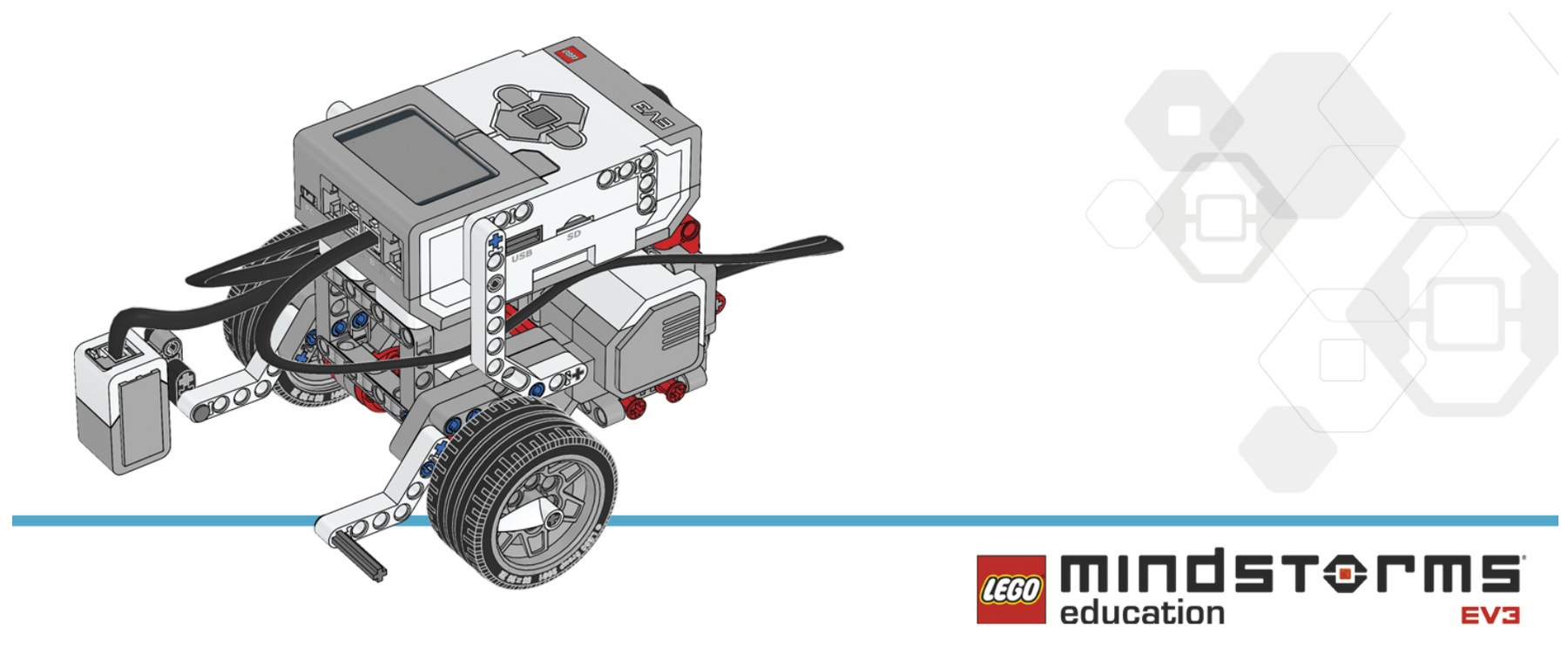
Constrúyelo
Construye el modelo de la Base motriz y el módulo del Sensor de color abajo.
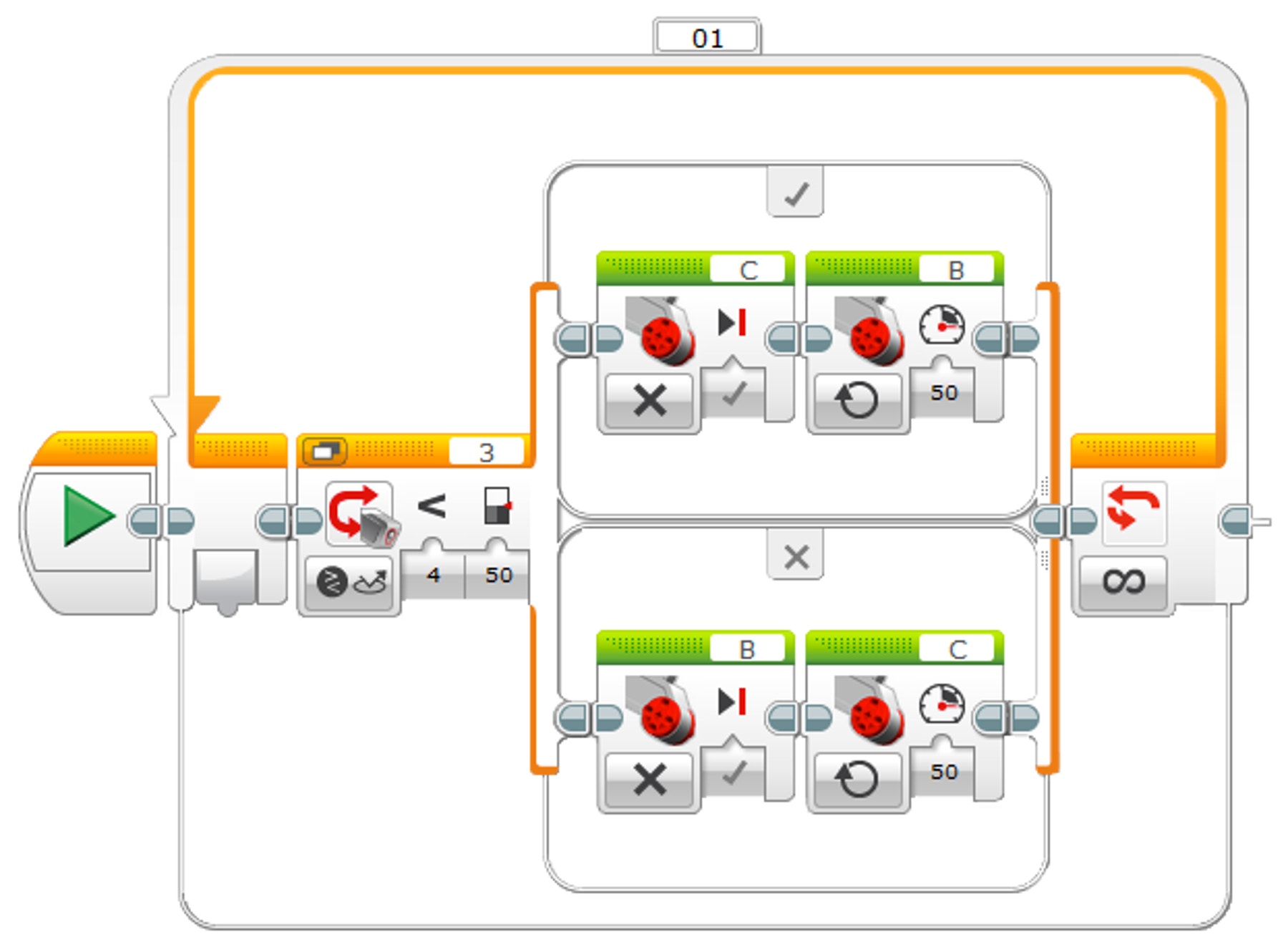
Pruébalo
Recrea el programa mostrado, luego descárgalo y ejecútalo para probarlo. Consejo La Aplicación de Vista del puerto del Ladrillo EV3 también puede utilizarse para visualizar lecturas del sensor en tiempo real.
Resumen del programa Iniciar Mover la dirección – Grados[685], Dirección[100] Esperar – Tiempo[1s] Mover la dirección – Grados[1380], Dirección[50] Esperar – Tiempo[1s] Mover la dirección – Rotaciones[2], Dirección[25]
Ajuste del umbral
Un umbral establece los márgenes superior e inferior de un sensor y los utiliza para encontrar el promedio que, luego, se convierte en el umbral. En las siguientes páginas, establecerás el umbral de la sensibilidad que el Sensor de Color tendrá hacia la luz.
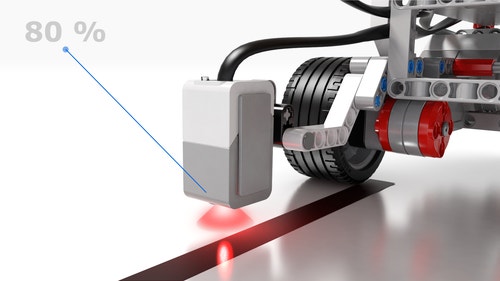
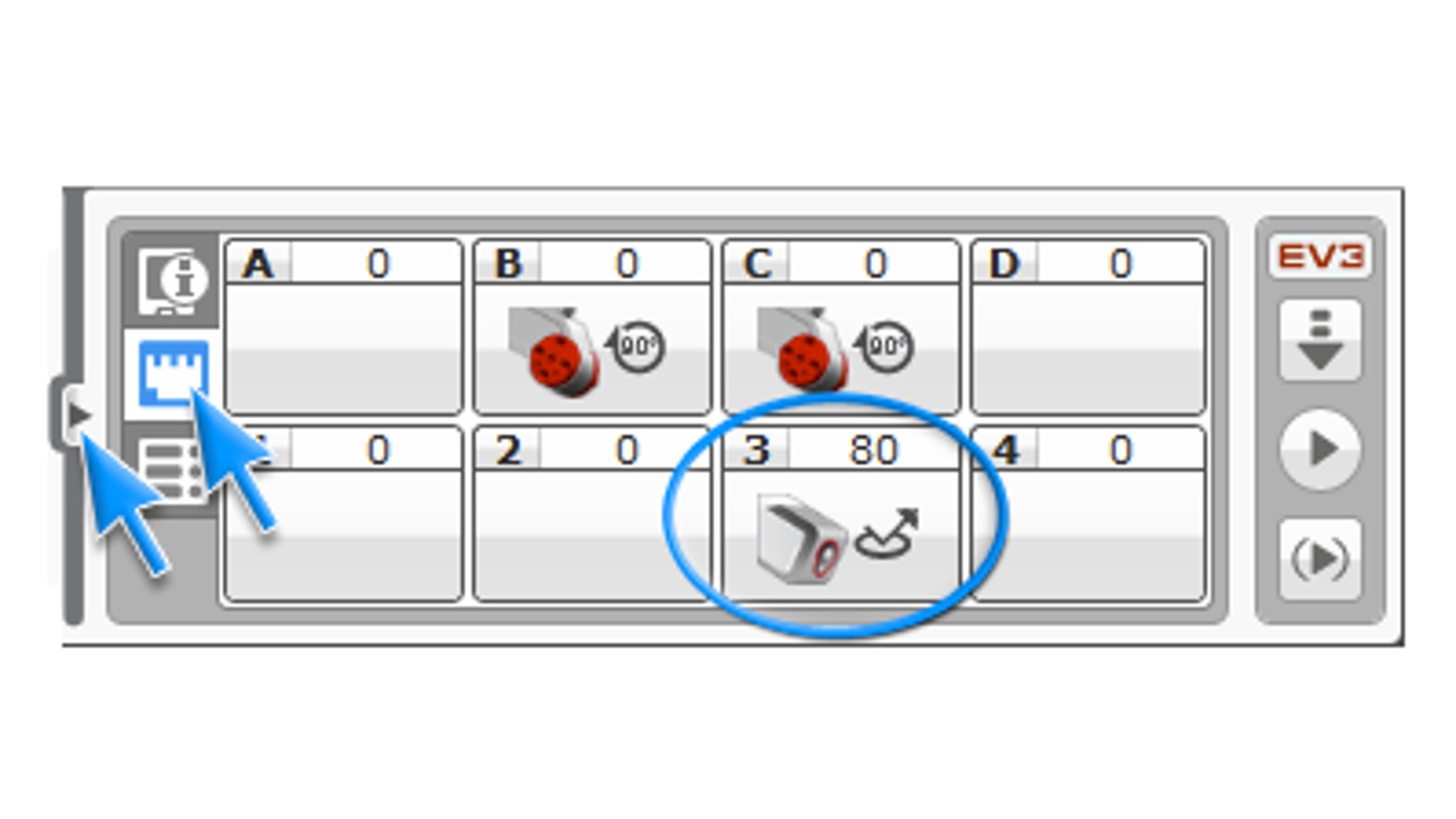
Primero, asegúrate de que la Base motriz esté conectada a través de USB y después mueve el Sensor de color sobre la línea oscura.
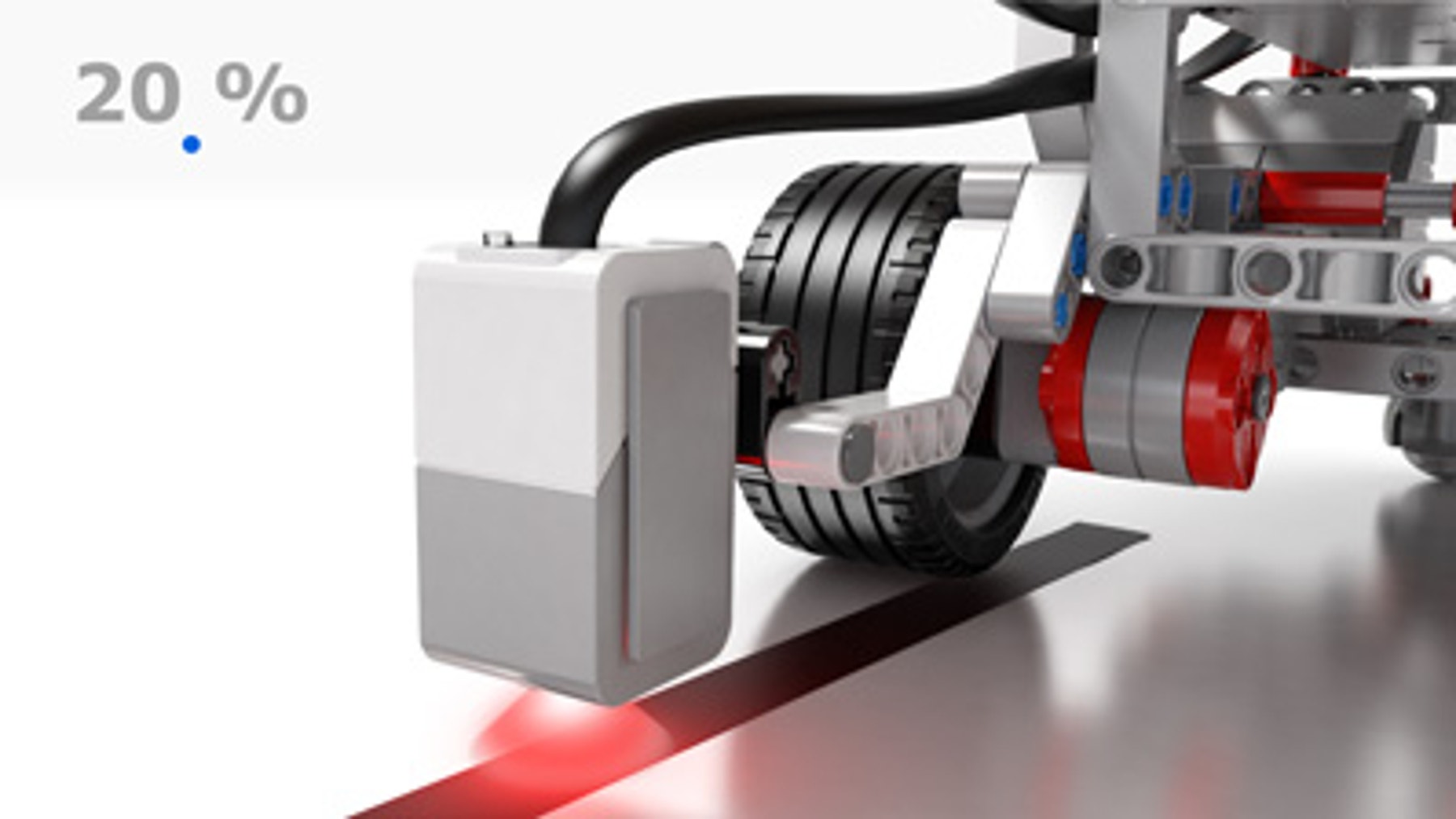
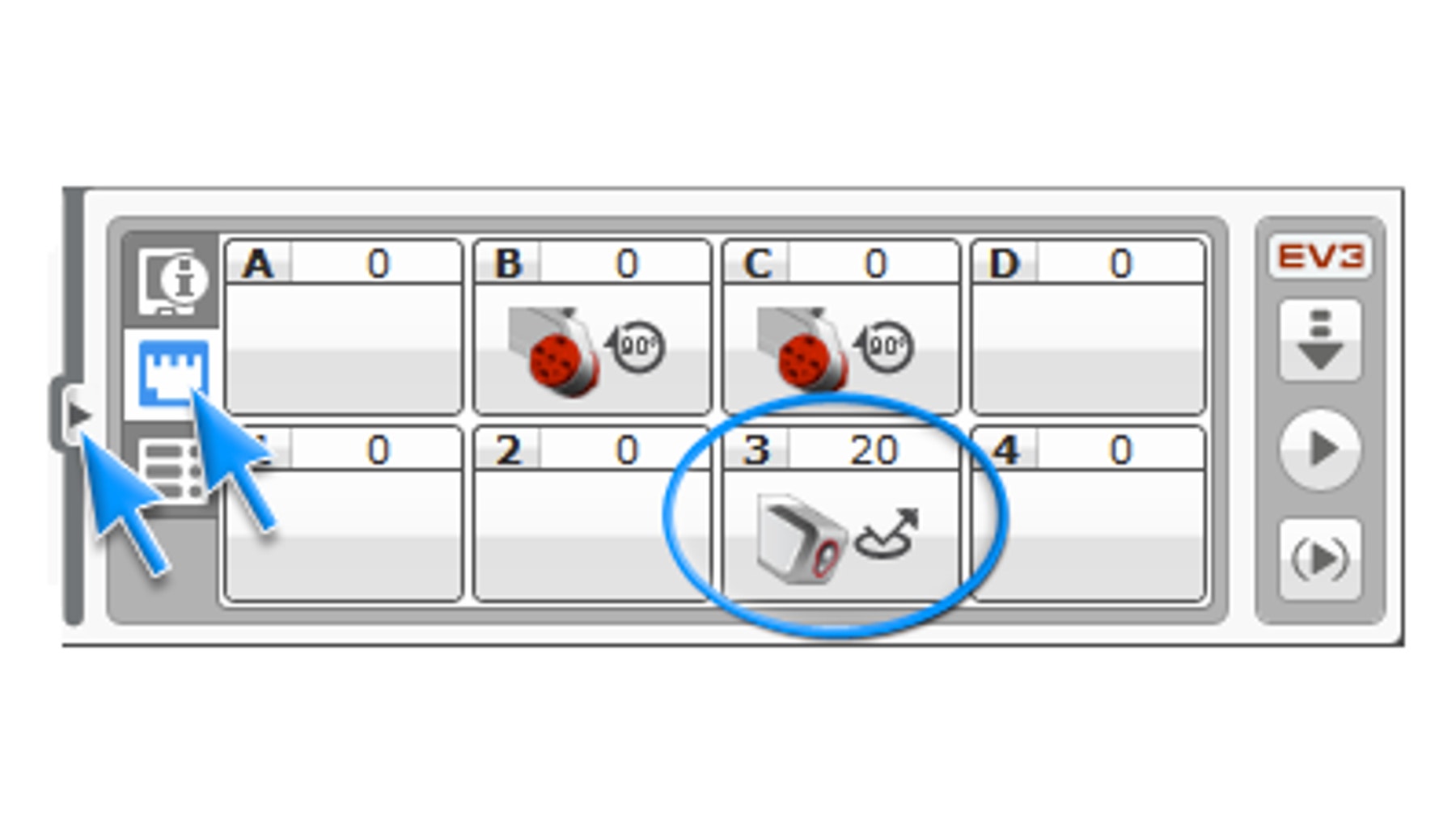
A continuación, abre la página de Hardware y anota el valor mostrado en el puerto 3. Este es el valor mínimo (x).
Ahora, aleja el Sensor de color de la línea oscura.
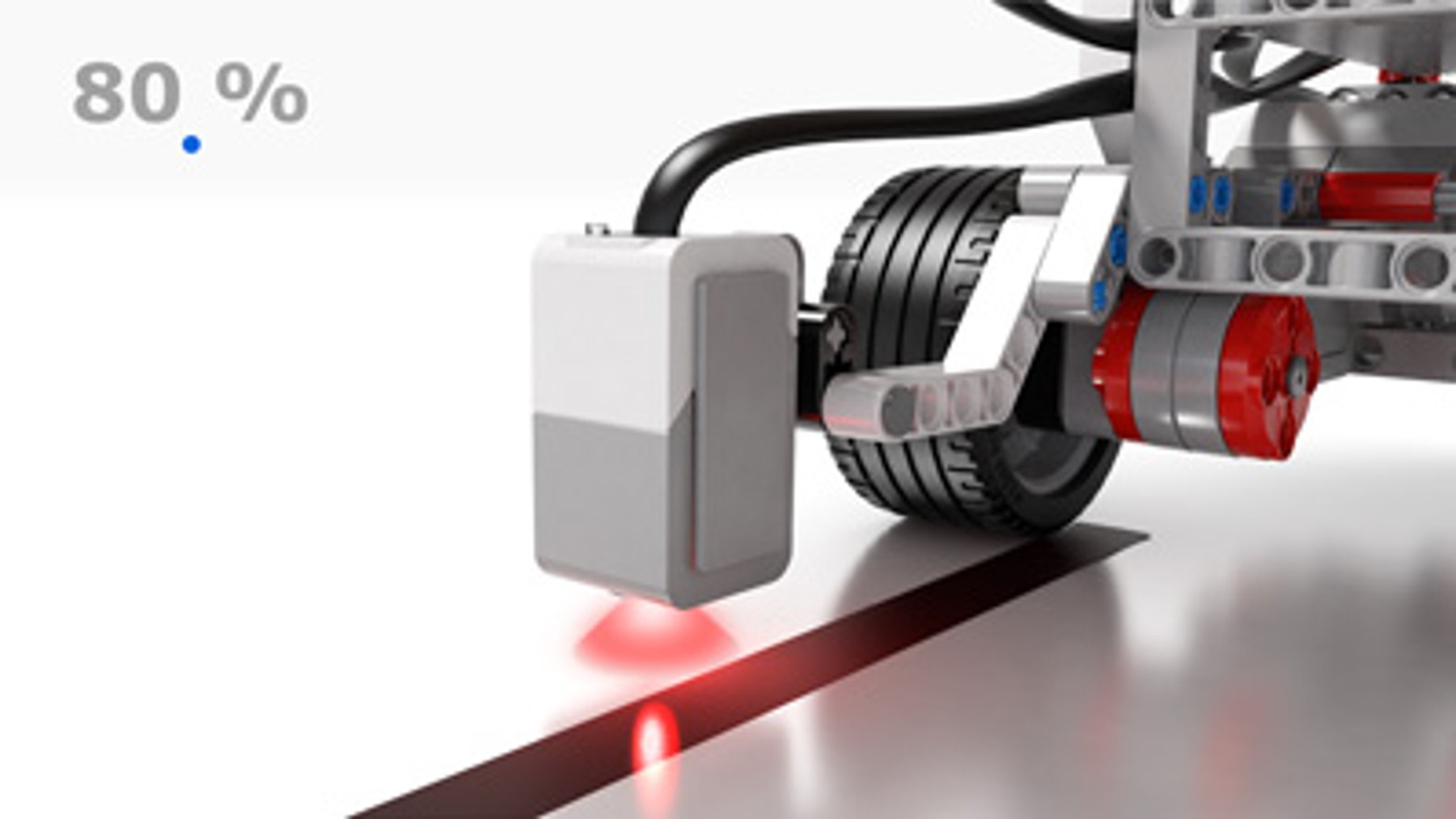
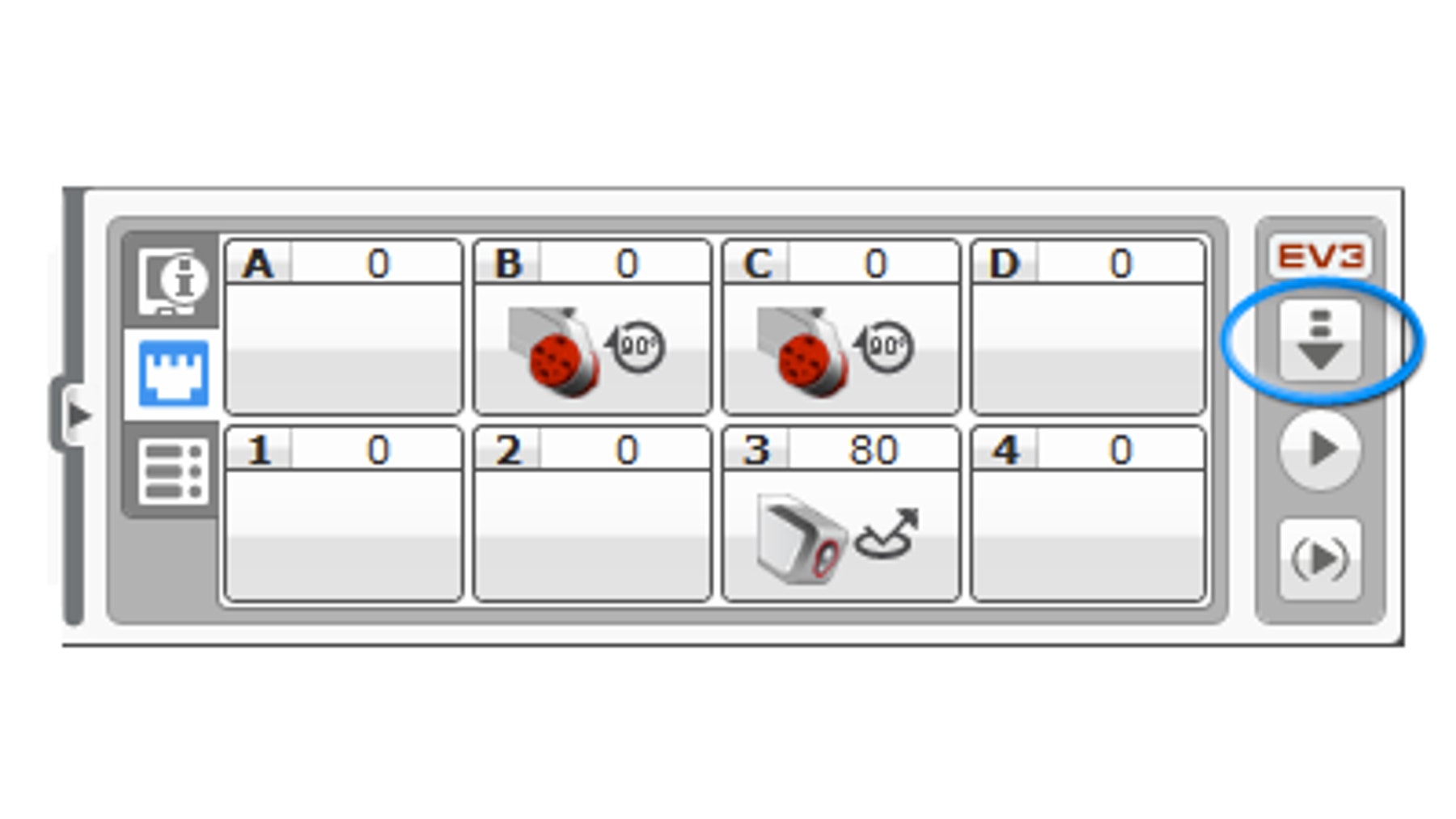
Anota el nuevo valor mostrado en el puerto 3. Este es el valor máximo (y).
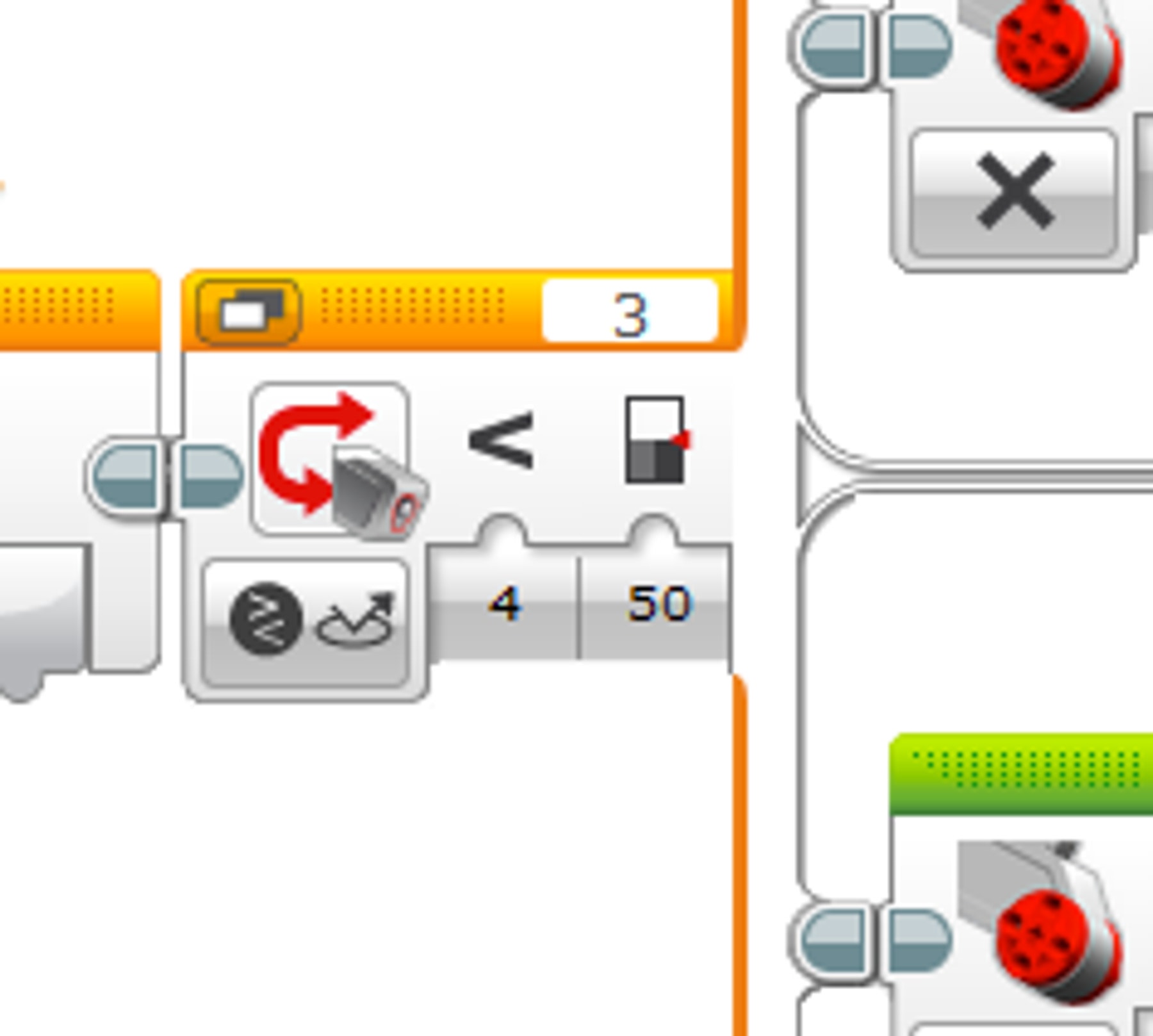
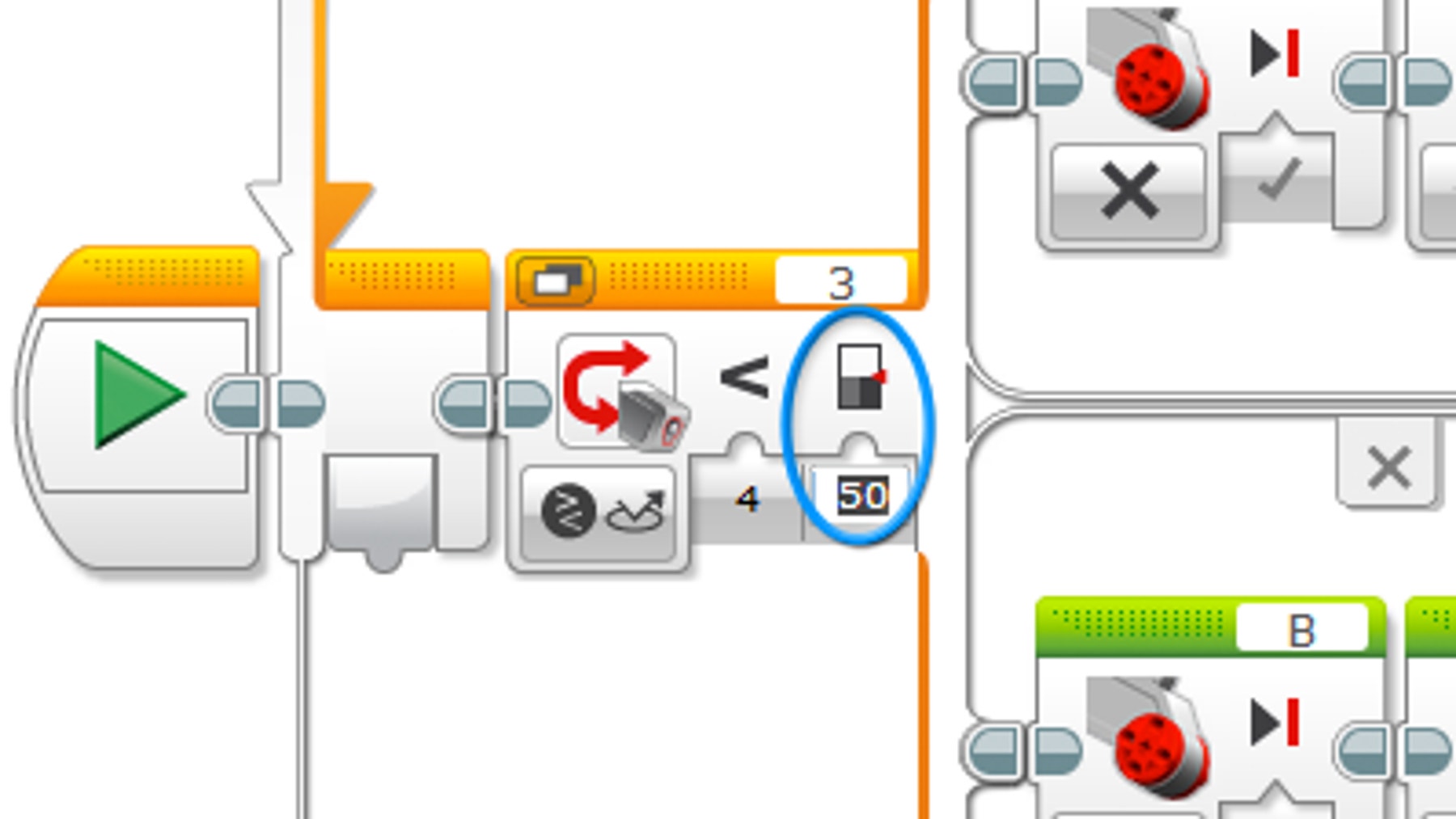
Para establecer el umbral, calcula la ecuación (x+y)/2 e introduce el resultado en el bloque Esperar (es posible que el valor sea diferente al que se muestra en el ejemplo).
A continuación, descarga el programa.
Modifícalo
¡Ahora es tu turno! Prueba si la Base motriz funciona cuando sigue una línea de color más claro. Si no funciona, intenta ajustar el umbral de nuevo. Resolución de problemas En algún punto, la luz del sensor que se refleja fuera de la línea superará el umbral y provocará que la Base motriz se mueva en círculos. En tal caso, cambia el valor del umbral. Consejo Si la diferencia entre los valores de X e Y es muy pequeña, la línea no será detectada. Si ocurre esto, intenta recalibrar el sensor.
¿Qué sigue?

Soporte para el profesor
Los estudiantes: Utiliza el bloque Mover la dirección para girar la Base motriz.
MARCO REFERENCIAL PENSAMIENTO COMPUTACIONAL EDUCACIÓN BÁSICA
OPCP/P
Algoritmos y desarrollo: Diseñar, construir y depurar secuencias ordenadas de instrucciones, a partir del uso de estructuras simples de código que involucren la utilización de iteraciones (repeticiones de parte del algoritmo), variables y distintos formatos de entrada y salida de datos.