¡Encuentra la línea correcta!
Es fácil ganar una carrera de autos. Básicamente, basta con ser el más rápido y mantenerte en tu carril.
¿Sería útil que pudieras seguir una línea?
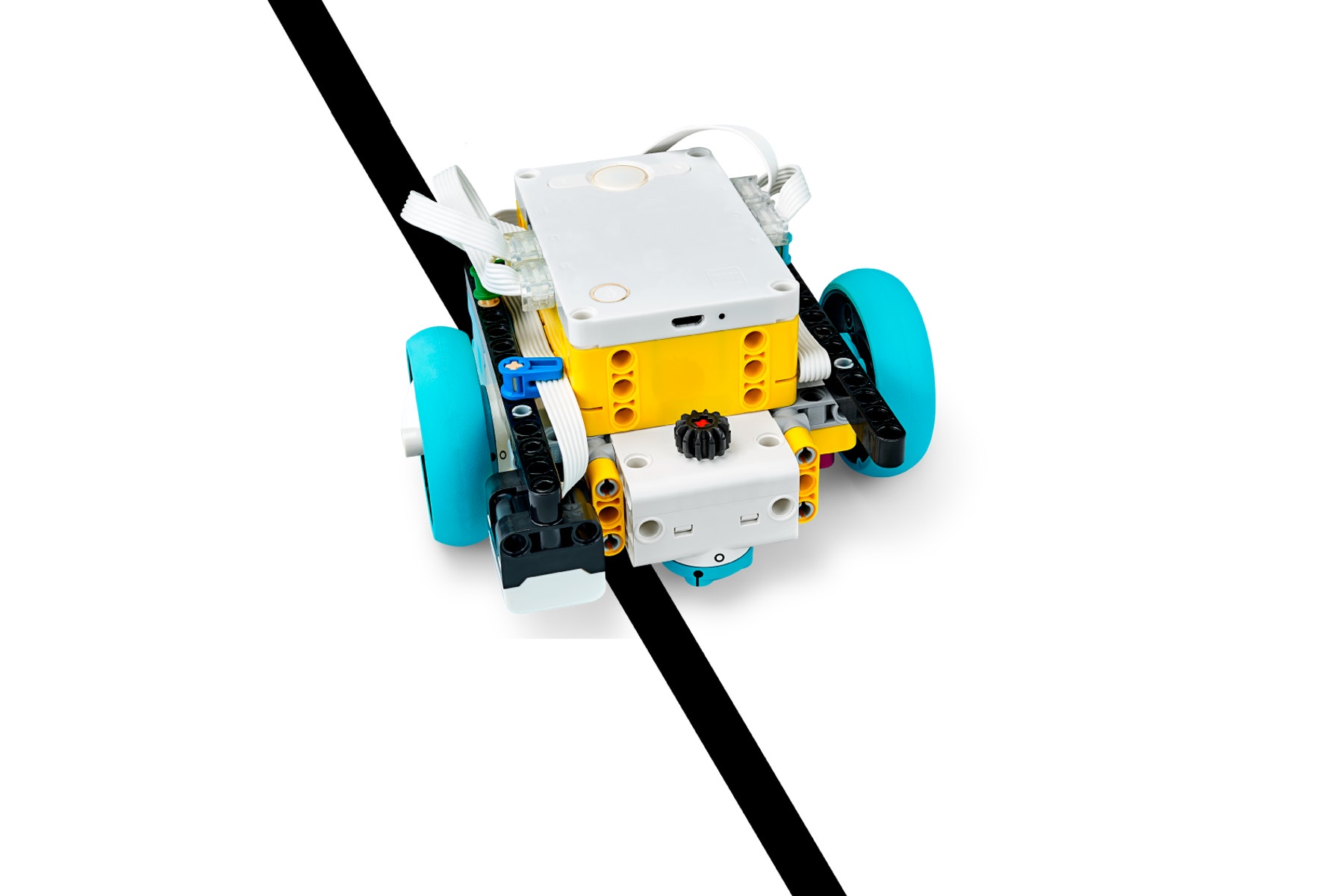
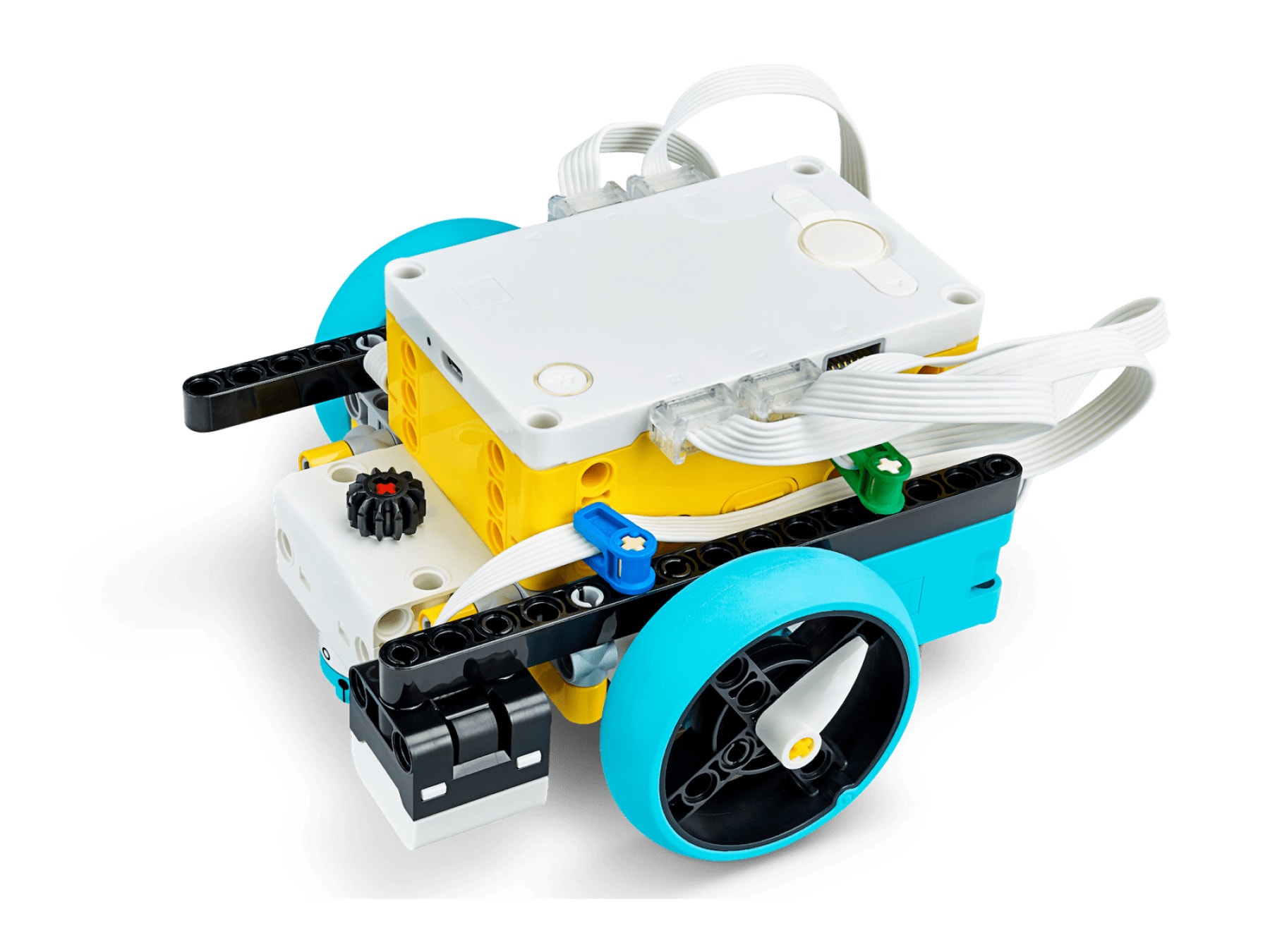
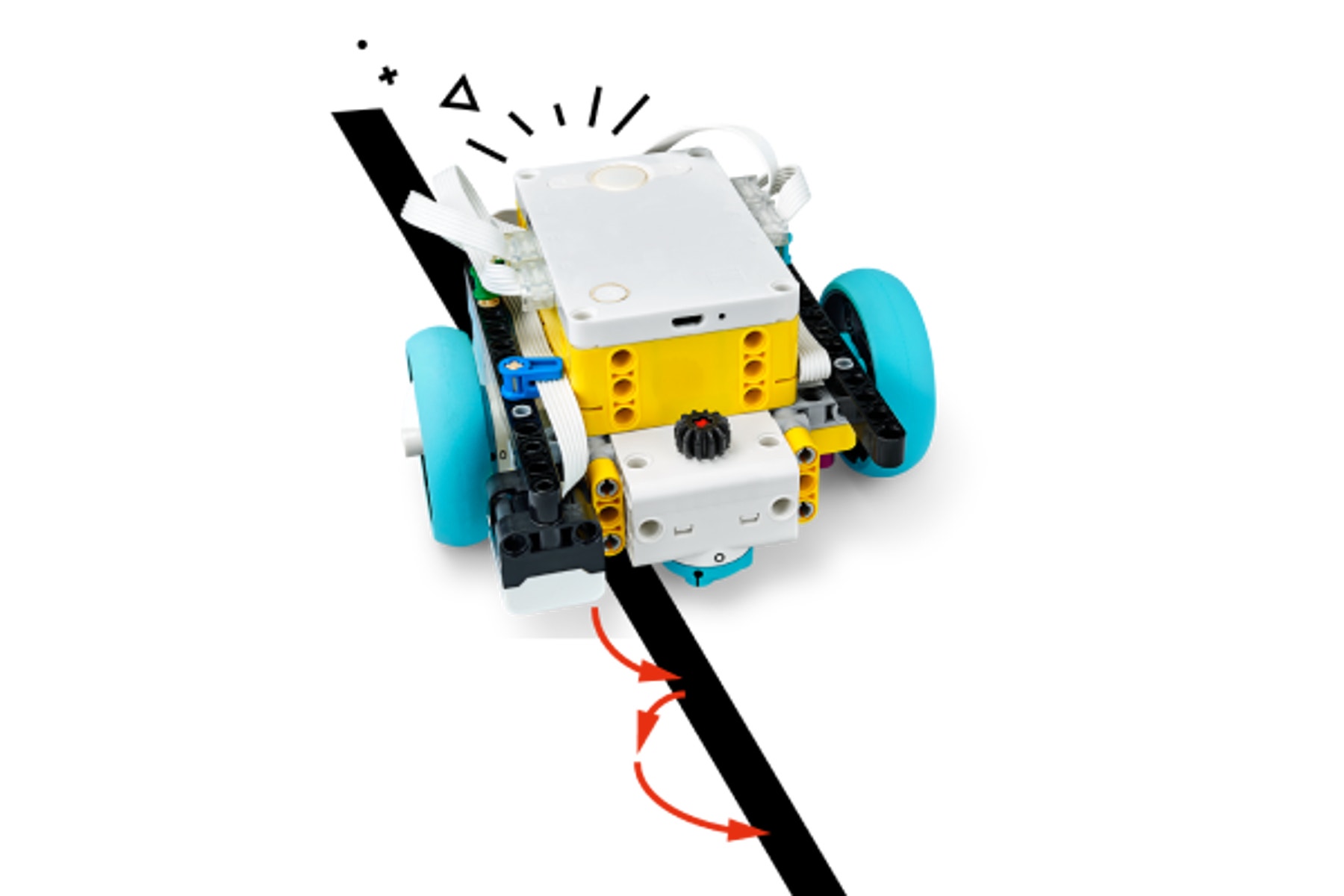
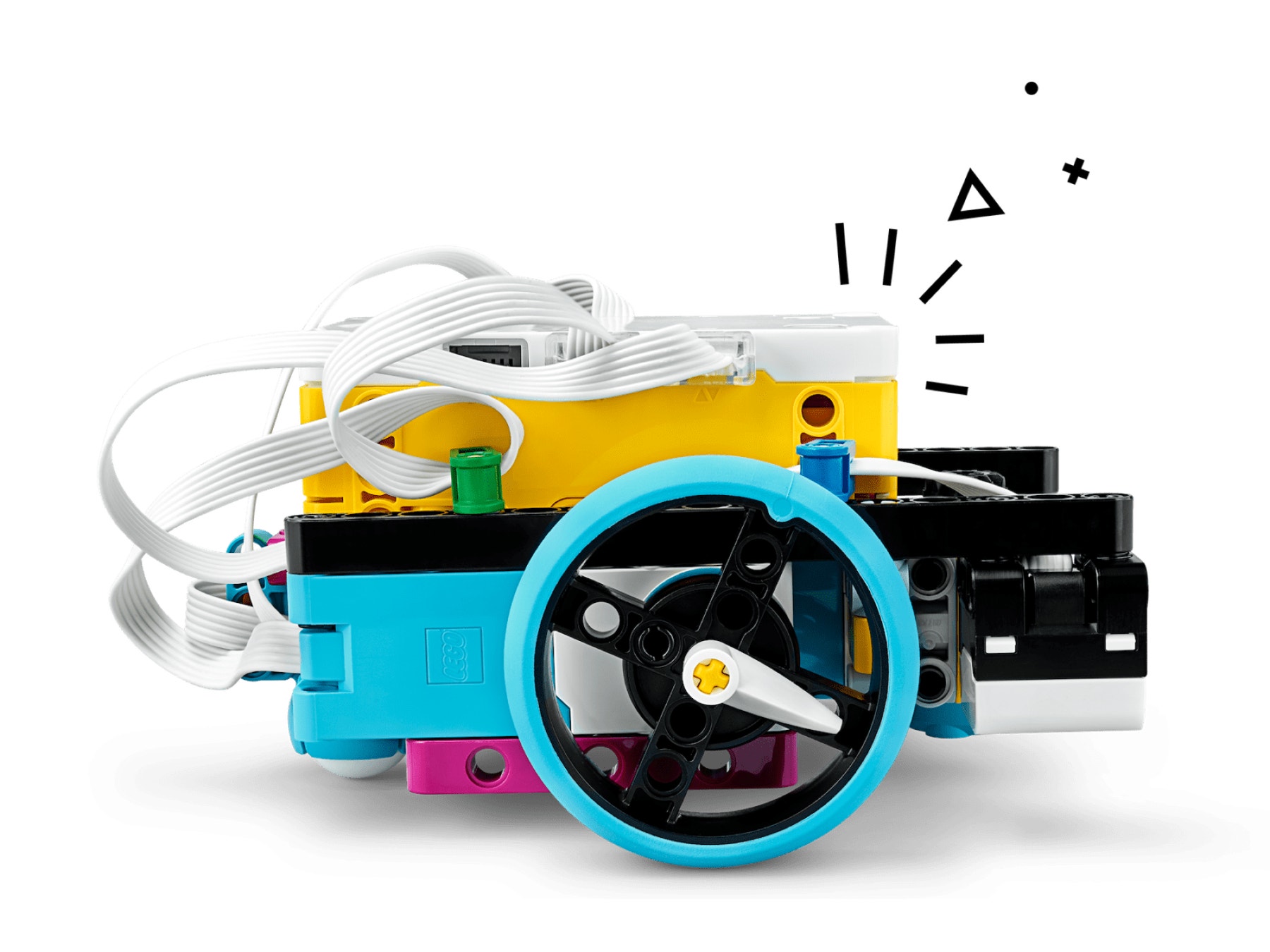
Construye esta Base motriz con Sensor de color.
¡Vamos!
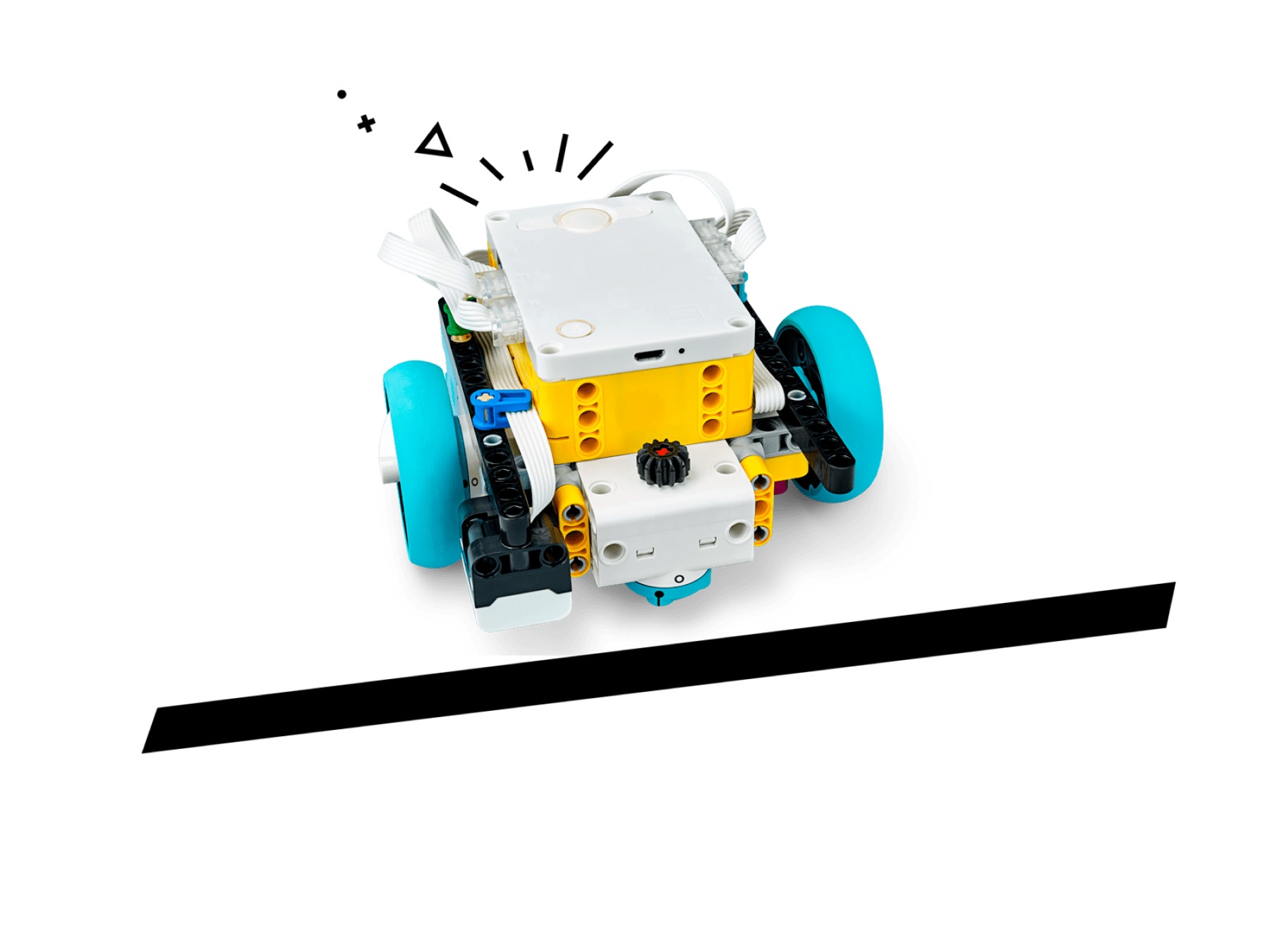
Haz que conduzca y se detenga ante una línea.

Prueba la primera pila de programación y describe lo que observes.
La primera pila hace que la Base motriz se detenga ante una línea que sea perpendicular a su movimiento.
La línea puede ser:
- Una línea negra dibujada en una hoja de papel
- Cinta negra
- Ladrillos LEGO negros más grandes
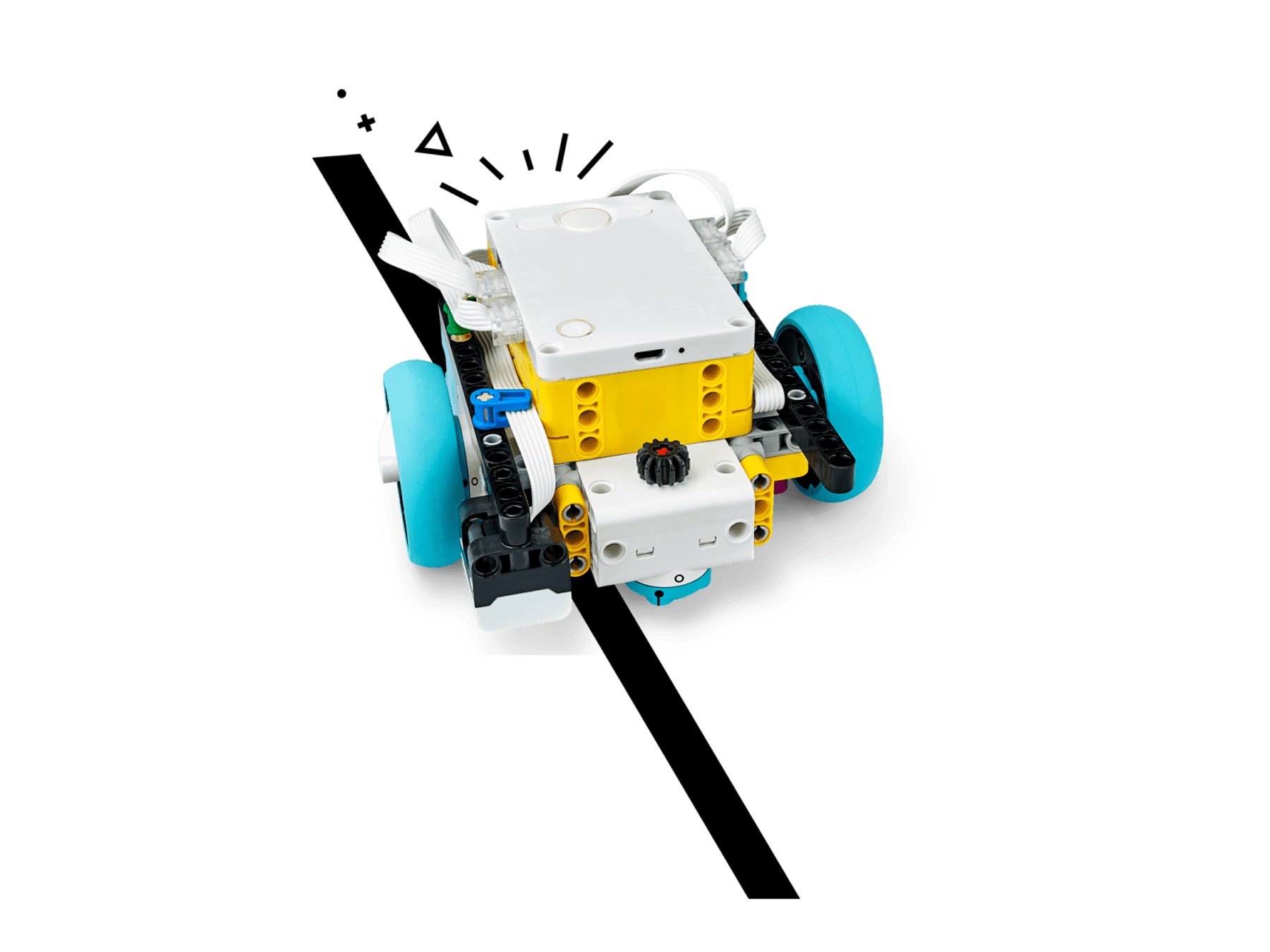
Haz que conduzca sobre una línea.
Prueba la segunda pila de programación y describe lo que observes.
Si el Sensor de color detecta el borde de la línea negra, la Base motriz gira en dirección al espacio blanco.
Cuando el Sensor de color no detecta el borde de la línea negra, la Base motriz gira en dirección opuesta a la línea negra.
Repitan estas 2 acciones por siempre.
Tal vez hayas notado que estamos dirigiendo los motores a la derecha con un valor de 50 y a la izquierda con un valor de -50. ¿Sabes por qué?
Durante el movimiento a lo largo de la línea, es necesario que uno de los motores se mueva y el otro esté detenido para permitir que la Base motriz avance. Si la Base motriz diera vuelta de manera muy abrupta, simplemente daría vueltas en vaivén en el mismo lugar.
Optimiza tu programa para que el robot sea más rápido.
Hay muchas formas de hacer que el seguidor de líneas sea más rápido.
¡Organiza una carrera para ver qué equipo tiene la Base motriz más rápida!
Añade un bloque “SI...; SI NO,...” para acelerar la ejecución del programa.
Sigue explorando el programa seguidor de líneas... ¡te sorprenderá lo mucho que puedes mejorar la velocidad!
Tu programa podría verse como este:

¿Cómo les fue?

¿Qué hiciste bien? ¿Hay algo que podrías haber hecho mejor?
¡Genial! Ahora debes poder mover la Base motriz casi en cualquier lugar sobre un campo de juego.