Proyecto Para empezar, parte C: Sensor de inclinación de Milo
Descubre cómo usar el Sensor de inclinación para ayudar a Milo a enviar un mensaje a la base.

1. Preparación
((15-30 minutos))
• Lee la parte de preparación general en el capítulo “Organización del aula”. • Lee sobre el proyecto para que te des una buena idea de qué vas a hacer. • Define cómo quieres presentar este proyecto: Utiliza el video que se proporciona en el proyecto en el software WeDo 2.0 o usa el material de tu preferencia. • Determina el resultado final de este proyecto: los parámetros que presentarás y genera el documento. • Asegúrate de que el tiempo permita que se cumplan las expectativas. Importante Se recomienda que completes los cuatro proyectos Para empezar en una sola secuencia. Si no es así, es preferible que lo hagas antes de seguir con otros proyectos para darles tiempo de sobra a tus estudiantes para explorar los materiales. El tiempo aproximado de los cuatro proyectos Para empezar es de: • Parte A: Milo, el róver científico: 40 minutos • Parte B: Sensor de movimiento de Milo: 15 minutos • Parte C: Sensor de inclinación de Milo: 15 minutos • Parte D: Colaborar: 15 minutos
2. Fase Explorar
(3 minutos)
Cuando los róvers localizan lo que están buscando, envían un mensaje a la base. Preguntas para debatir 1. ¿Por qué es importante la comunicación entre un róver y la base? Si un róver tiene éxito en su misión, pero no envía los resultados, la misión no habrá valido la pena. La comunicación sigue siendo el vínculo entre la misión remota y la base. 2. ¿Cuáles son algunas formas en que te podrías comunicar con los róvers? En la actualidad, se usan los satélites para enviar señales de radio entre la base y el róver.
3. Fase Crear
(7 minutos)
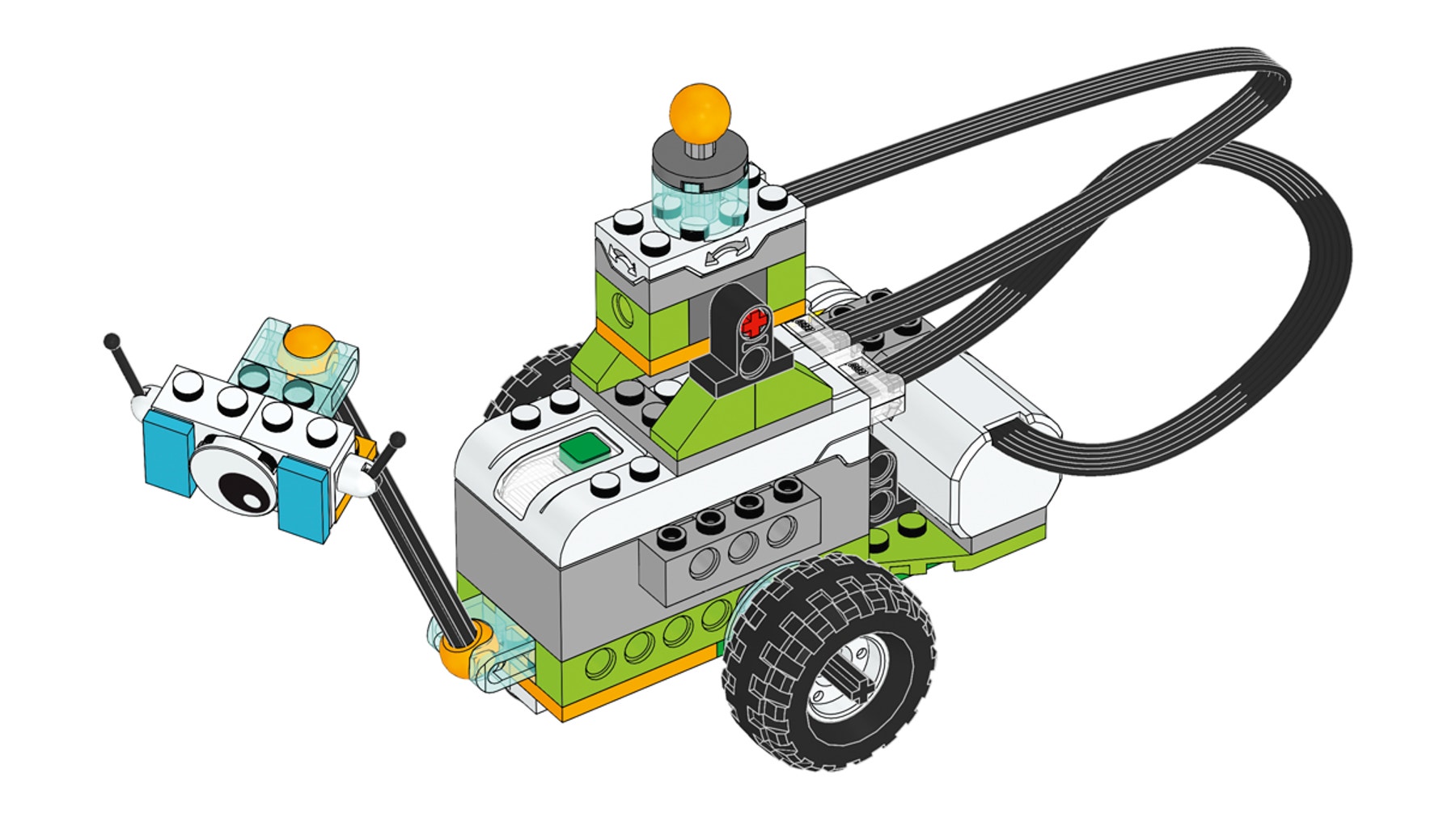
Con las instrucciones para la construcción proporcionadas, tus estudiantes construirán un dispositivo con el Sensor de inclinación que puede enviar un mensaje a la base. La cadena de programación detonará dos acciones, dependiendo del ángulo que detecte el Sensor de inclinación: • Si se inclina hacia abajo, se iluminará el LED rojo. • Si se inclina hacia arriba, aparecerá un mensaje de texto en el dispositivo.

4. Fase Compartir
(5 minutos)
En esta sección del proyecto Para empezar, pídeles a tus estudiantes que tomen una captura de pantalla de su programa final. Pide que practiquen la documentación de las cadenas de programación que usaron en su proyecto.
Soporte para el profesor
Los estudiantes: Crearán y programarán un brazo para enviar mensajes a Milo con el Sensor de inclinación. Documentarán la comunicación de Milo con la base.
MARCO REFERENCIAL PENSAMIENTO COMPUTACIONAL EDUCACIÓN BÁSICA
OPCP/I
Algoritmos y desarrollo: Seguir, describir y construir secuencias ordenadas de instrucciones (algoritmos) simples (organizando una instrucción detrás de otra, de forma lineal), para desarrollar soluciones, aplicándolas tanto en el mundo físico, con objetos concretos, como en entornos computarizados.
OPCP/I
Algoritmos y desarrollo: Integrar el uso de dispositivos robóticos simples, apropiados para el nivel, y reconocer las posibilidades de interacción entre el mundo físico y el virtual
APRENDIZAJES CLAVE PARA LA EDUCACIÓN INTEGRAL
ESP/P3/PS
Producción e interpretación de instructivos y documentos que regulan la Convivencia:
Elige un instructivo y lleva a cabo el proceso de elaboración de un juguete.
ESP/P3/PS
Producción e interpretación de instructivos y documentos que regulan la Convivencia: Reflexiona sobre las características de los textos instructivos: organización de los datos, brevedad, secuencia de la información y precisión de las indicaciones.
Material del alumno
Hoja de trabajo para el estudiante
Descarga, ve o comparte como una página HTML en línea o un PDF imprimible.