Löydä oikea viiva!
Autokilpailun voittaminen on helppoa. On vain oltava nopein ja pysyttävä omalla kaistalla.
Auttaisiko kisoissa, jos voisit seurata viivaa?
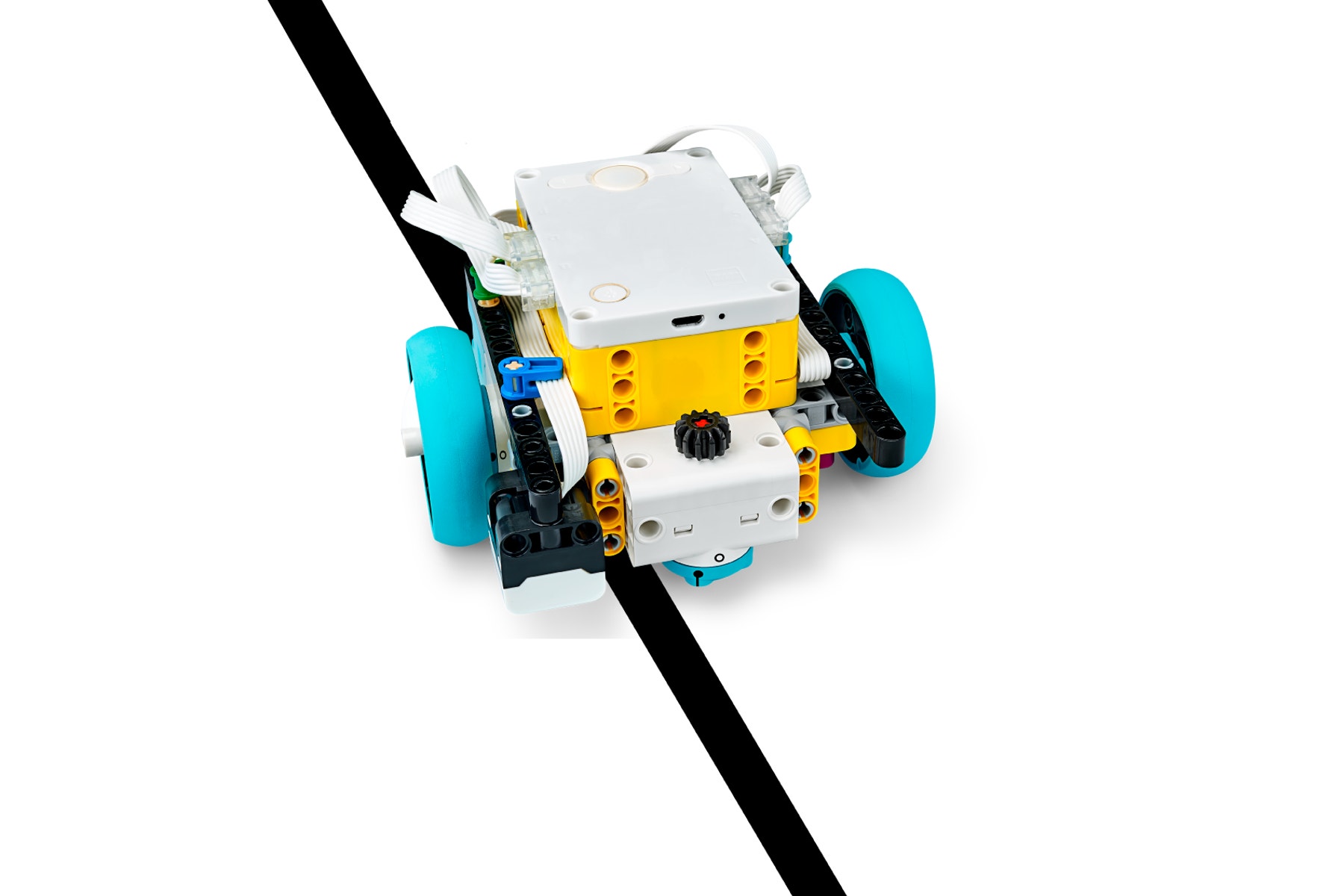
Rakenna tämä ajorobotti, joka sisältää värianturin.

Tehdään niin!
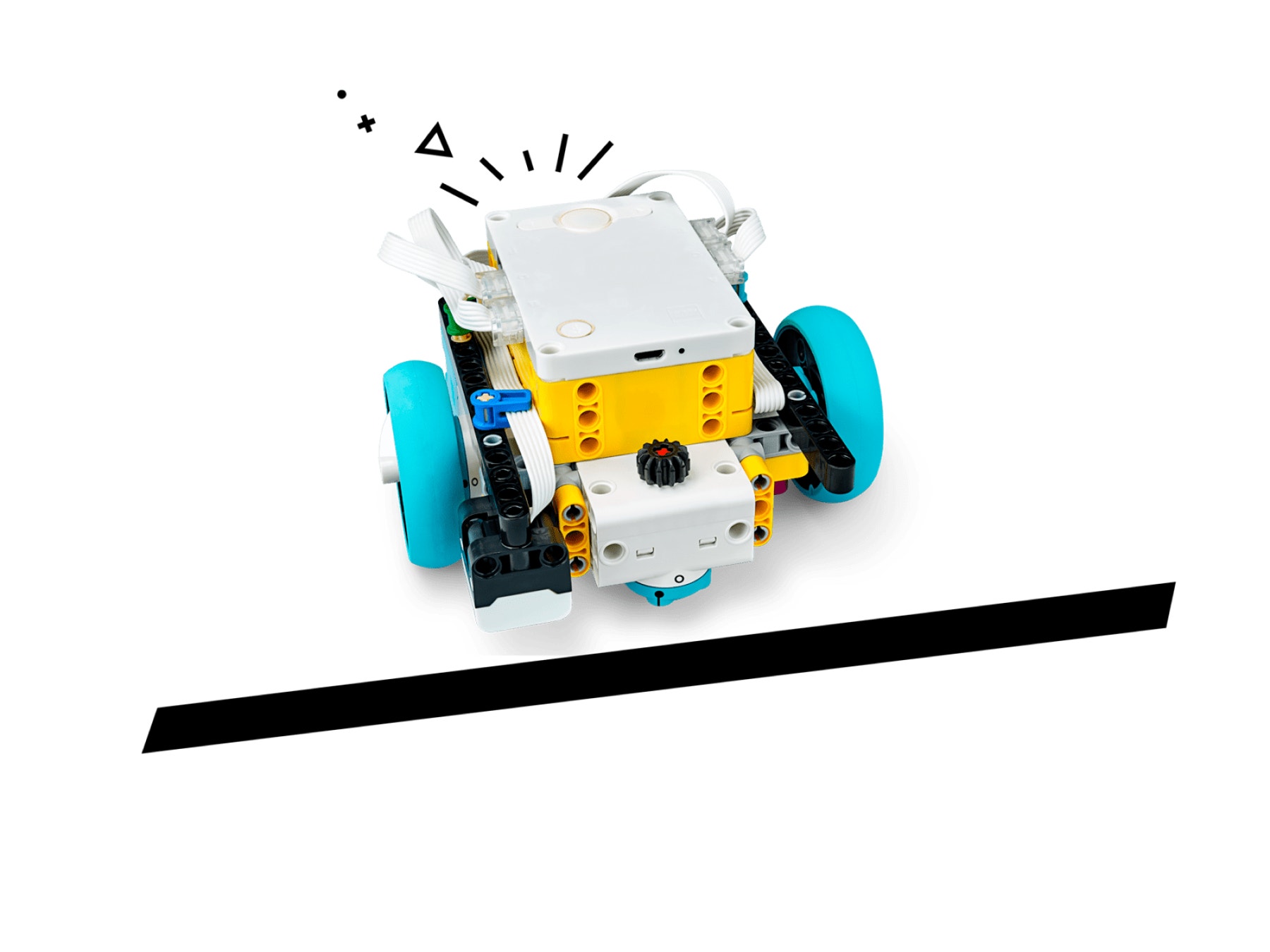
Aja ja pysähdy viivan kohdalle.

Kokeile ensimmäistä ohjelmointipinoa ja kerro, mitä tapahtuu.
Ensimmäinen pino saa ajorobotin pysähtymään, kun se pääsee viivalle asti.
Viiva voi olla:
- paperille piirretty musta viiva
- musta teippi
- rakennettu isoista mustista LEGO palikoista
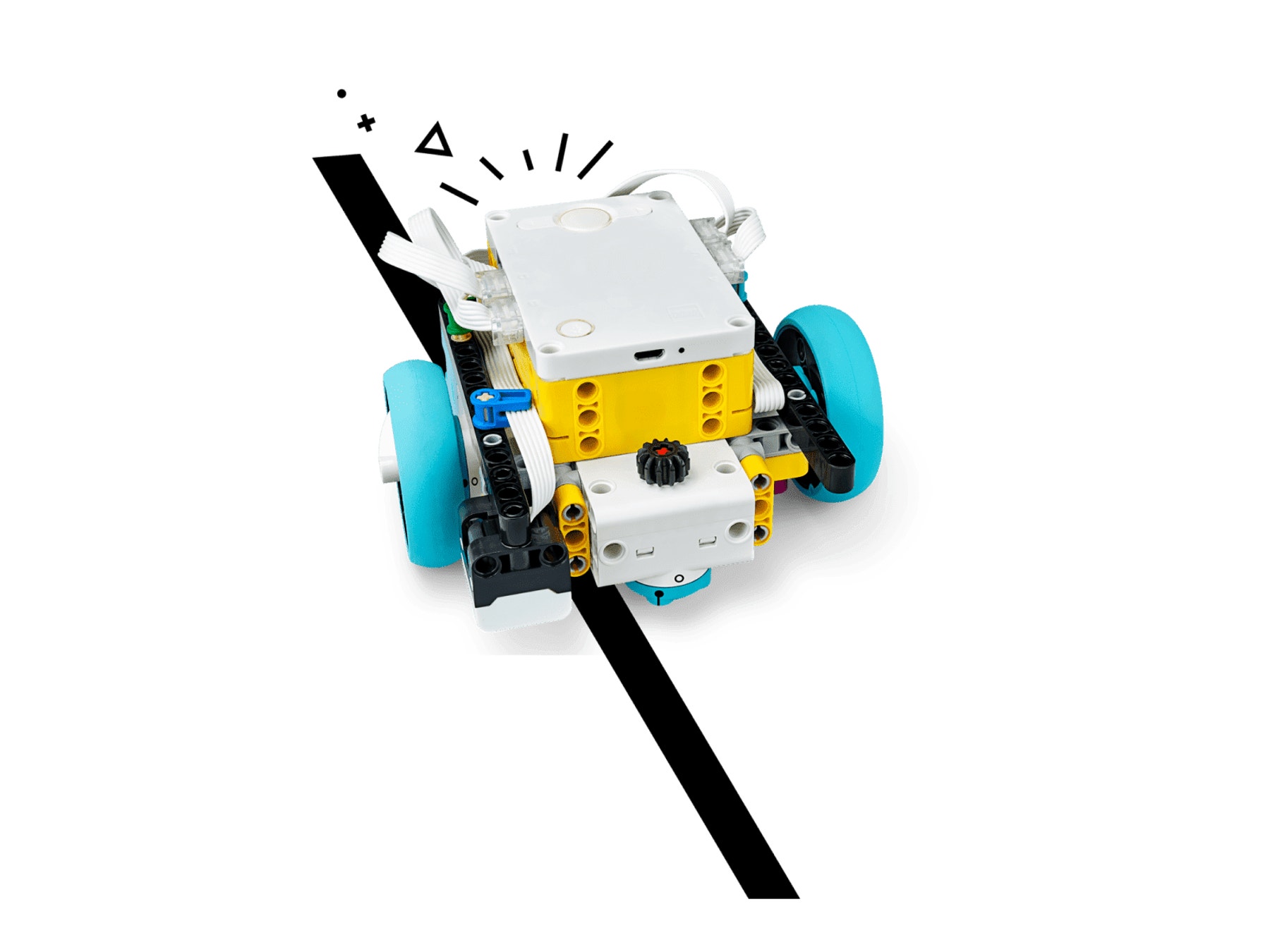
Aja viivaa pitkin.
Kokeile toista ohjelmointipinoa ja kerro, mitä tapahtuu.
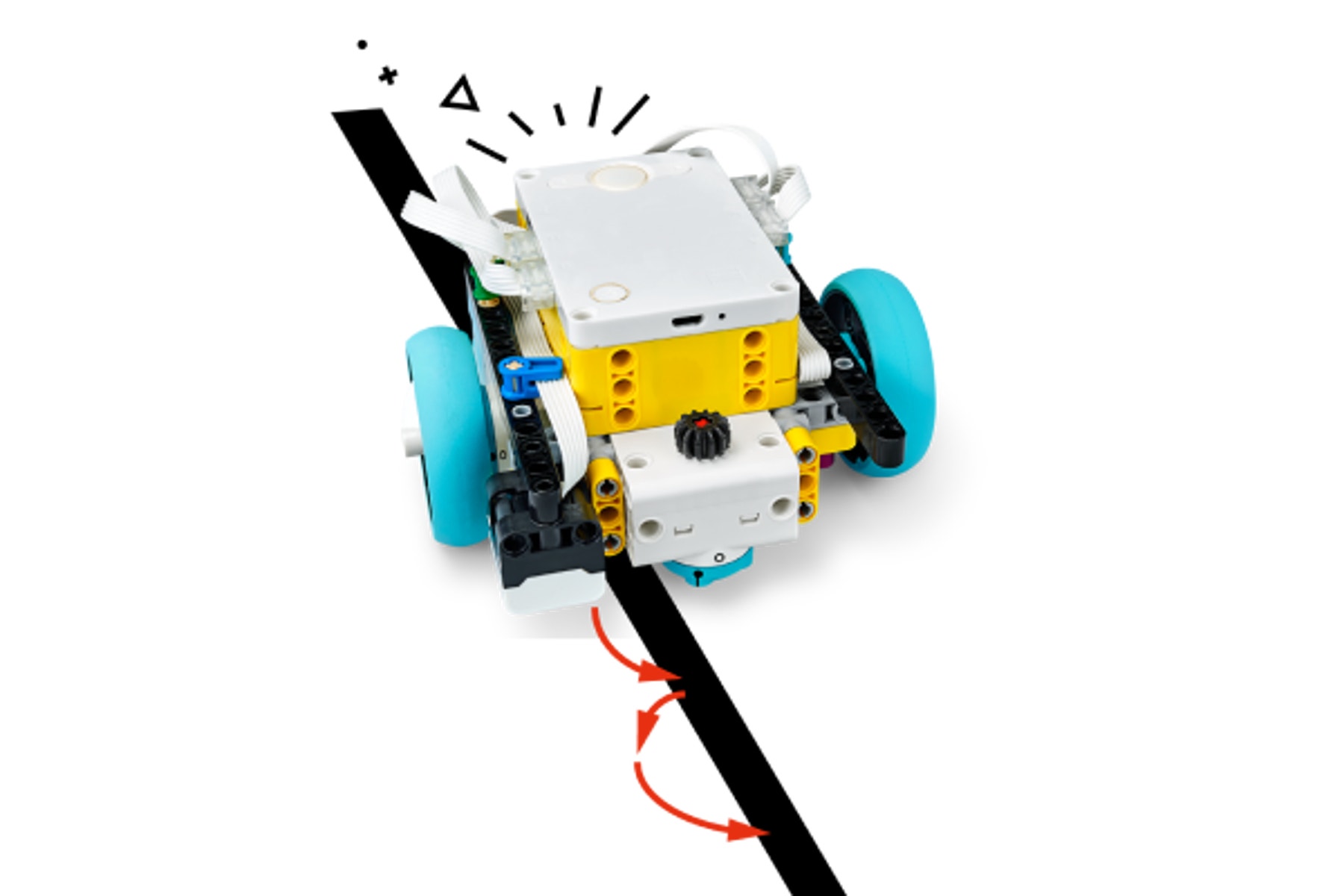
Jos värianturi havaitsee mustan viivan reunan, ajorobotti kääntyy valkoisen tilan suuntaan.
Jos värianturi ei havaitse mustan viivan reunaa, ajorobotti kääntyy päinvastaiseen suuntaan mustaan viivaan nähden.
Toista näitä kahta toimintoa jatkuvasti.
Olet saattanut huomata, että ohjaamme moottoreita oikealle 50 ja vasemmalle –50. Tiedätkö miksi?
Ajorobotti voi liikkua eteenpäin viivaa pitkin vain, kun yksi moottori on liikkeessä ja toinen moottori on pysähtyneenä. Jos ajorobotti kääntyy liian jyrkästi, se kääntyy vain eteen‑ ja taaksepäin paikallaan.
Optimoi, eli tuunaa ohjelmasi mahdollisimman tarkaksi ja nopeaksi.
Nopean viivoja seuraavan ohjelman voi tehdä monella eri tavalla.
Järjestä kilpailu, niin näet kenen ajorobotti on nopein!
Nopeuta ohjelman suorittamista lisäämällä siihen ehtolauselohko.
Tutki ja kokeile erilaisia viivanseuraajaohjelmia. Tulet yllättymään, kuinka nopeaksi ohjelma on mahdollista saada.
Ohjelmasi voi näyttää esimerkiksi tältä:

Miten pärjäsit?

Missä onnistuit? Olisitko voinut tehdä jotain paremmin?
Mahtavaa! Nyt pystyt liikuttamaan ajorobottia lähes minne tahansa kilpailukentällä.