Méthode expérimentale
Qu'est-ce qui est suffisant ?
Aucune machine n'est parfaite. Les ingénieurs font de leur mieux pour obtenir le niveau de précision et d’exactitude le plus élevé possible, mais il y aura toujours un certain degré d'erreur.
Quels facteurs déterminent le niveau d'erreur acceptable ?
Construisez ce *robot à engrenage conique*.
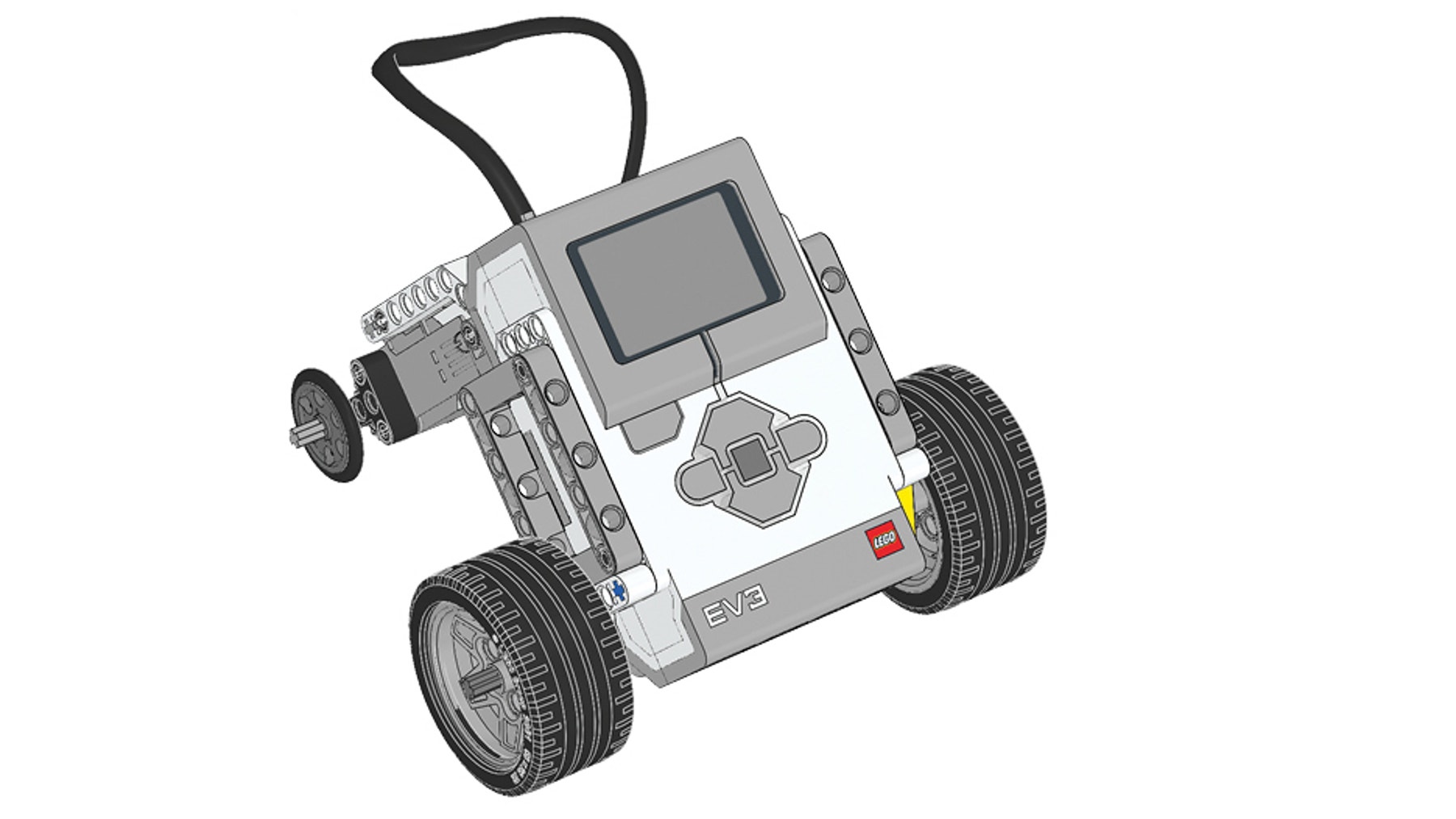
Il vous permettra de déterminer quels aspects de sa conception et de sa programmation peuvent causer des inexactitudes.
Effectuez un test.


Placez le modèle sur une surface solide et plane, puis marquez sa position de départ. Exécutez le programme et marquez la position finale une fois le robot immobile.
Le robot à engrenage conique se déplace-t-il de 100 cm ? Les rotations de moteur calculées, les rotations de moteur effectives et la distance parcourue calculée (en cm) apparaissent-elles à l’écran ?
Consignez vos résultats.
Consignez le numéro de l'expérience, la distance parcourue calculée et la distance parcourue mesurée dans un tableau de test. Assurez-vous de laisser suffisamment d'espace pour pouvoir ajouter des colonnes de calcul supplémentaires.
Réalisez l'expérience à l'aide du modèle et du programme par défaut. Répétez ensuite l'expérience après chaque modification afin d’en déterminer l’impact.
Expérimentation
Gardez les astuces suivantes à l'esprit lors de l’expérience :
- Les rotations de moteur calculées, les rotations de moteur effectives et la distance parcourue calculée (en cm) sont indiquées à l'écran.
- Effectuez l'expérience au moins trois fois et utilisez les valeurs moyennes pour vous assurer d’obtenir les résultats les plus fiables possible.
Synthétisez vos résultats.
Utilisez la distance parcourue mesurée moyenne pour chacune des modifications effectuées et calculez l'erreur afin d’identifier la version la plus précise.
Quelles modifications apportées à la conception et à la programmation du robot ont eu le plus d'impact sur son exactitude ?
Comment cela s’est-il passé ?
Qu’avez-vous réussi ? Qu’auriez-vous pu mieux faire ?
Excellent ! Vous savez désormais comment améliorer l’exactitude d'un robot. Passons à la leçon suivante.