Objets et obstacles
La base motrice est une plate-forme robotique modulaire.

Elle peut être étendue et reconfigurée au besoin. L'ajout de capteurs lui permet de réagir à son environnement afin, par exemple, de détecter les obstacles et d’éviter les collisions.
Pouvez-vous citer des robots capables de détecter des objets ?
Construisez le cuboïde ainsi que cette extension.
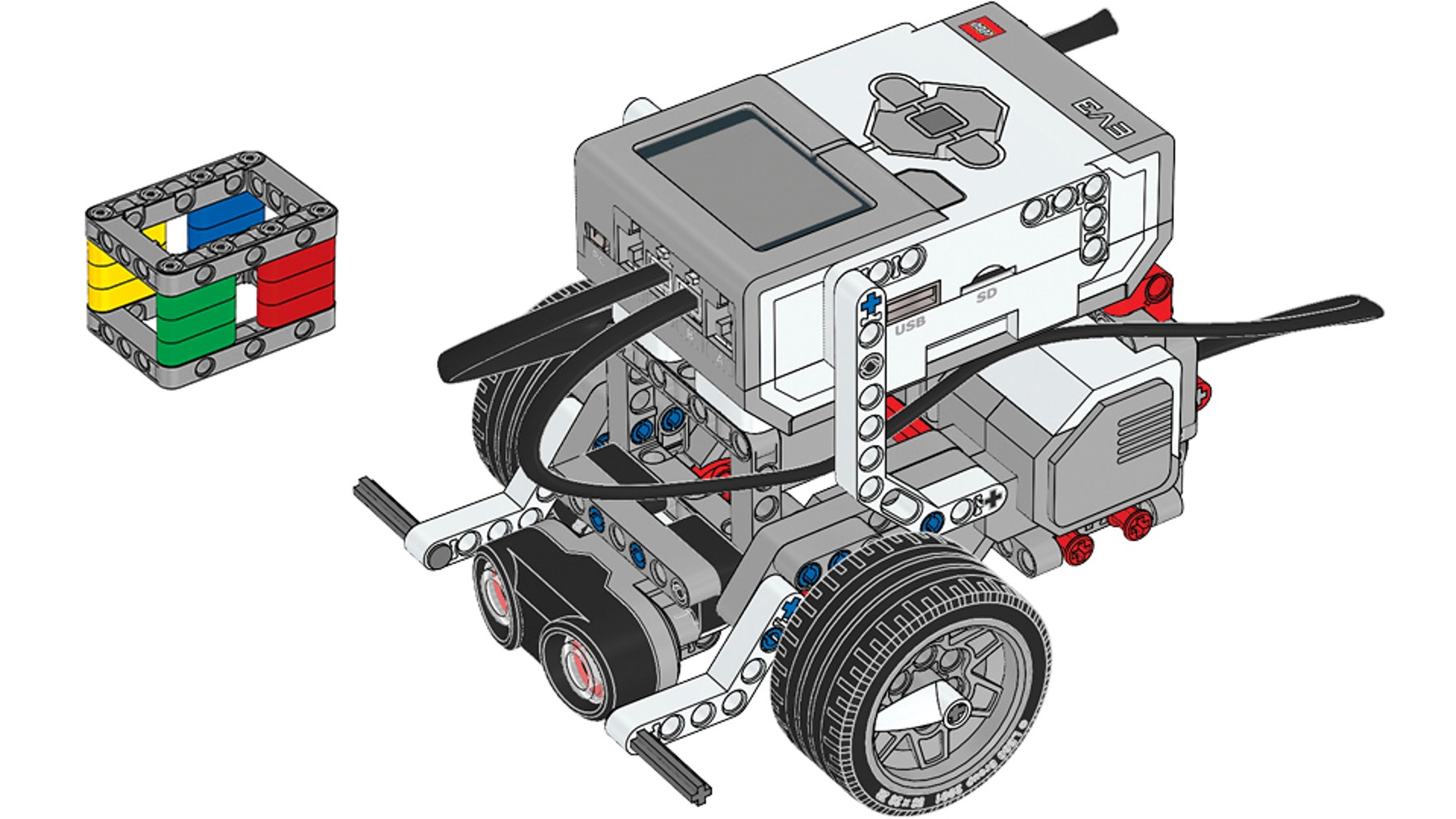
Vous aurez besoin de l'extension de capteur à ultrasons afin de détecter les objets et les obstacles. Construisez le cuboïde, puis construisez l'extension sur la base motrice.
Exécutez ces piles de programmation les unes après les autres.

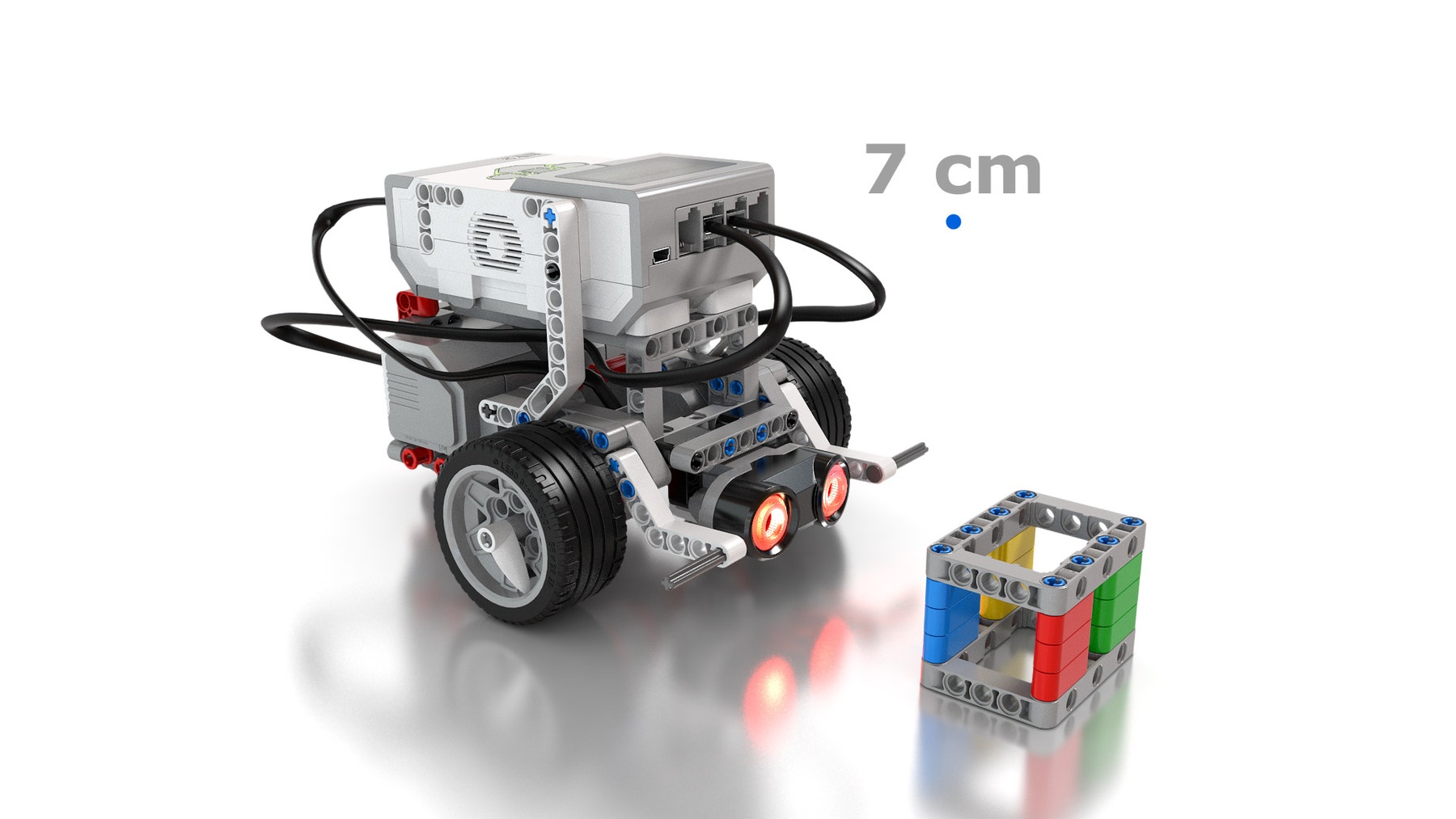
Que constatez-vous ? Essayez de placer le cuboïde dans différentes positions.
Dans quelles situations pourriez-vous utiliser le capteur à ultrasons pour mesurer une distance ?
À vous !

Utilisez les blocs des piles de programmation présentes dans la trame de programmation pour créer un programme réagissant à deux distances différentes du cuboïde.
C’est l’heure du défi !
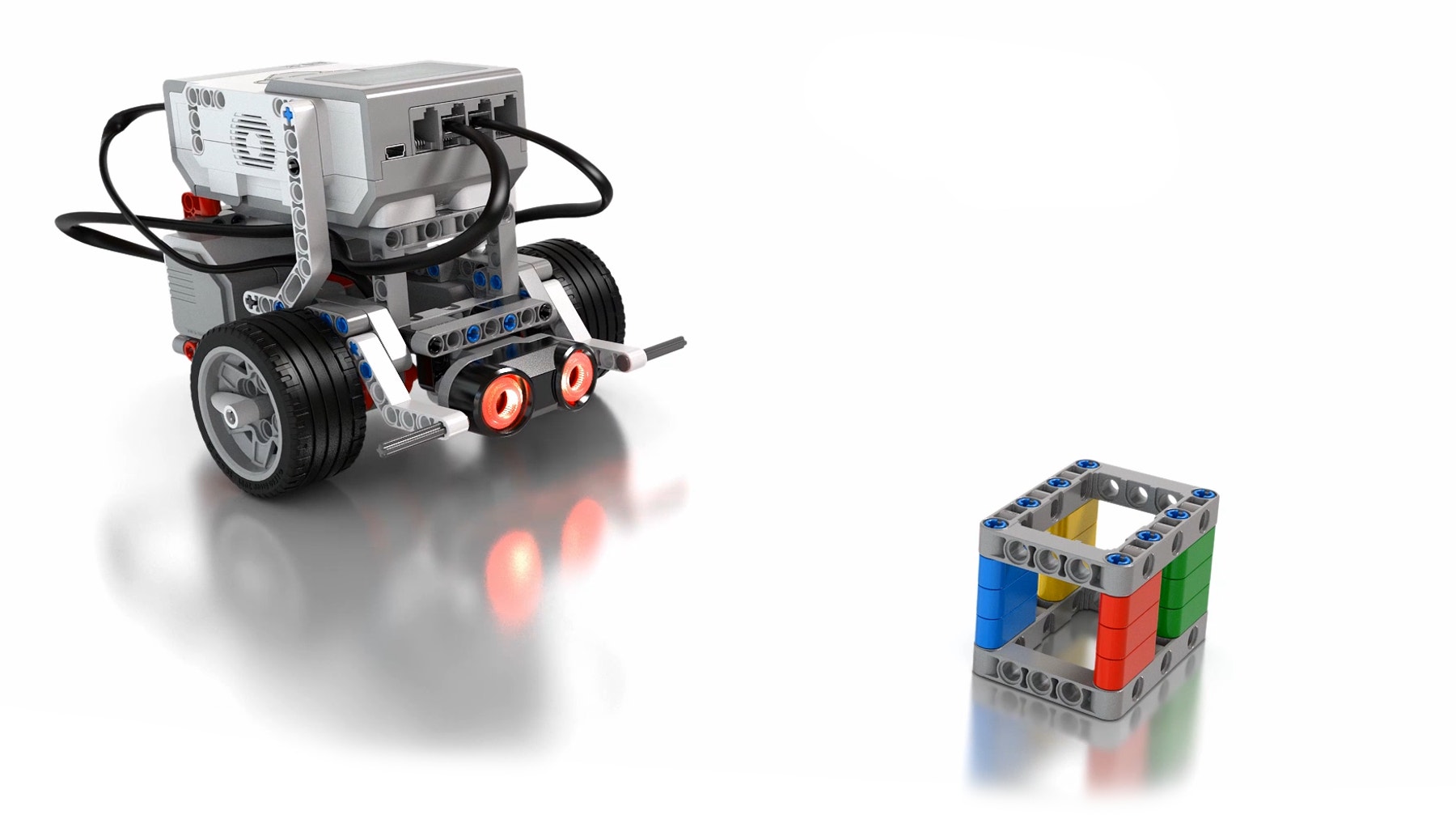
Programmez la base motrice pour qu’elle émette un bip plus rapide ou plus fort à mesure qu’elle se rapproche du cuboïde.
Comment cela s’est-il passé ?

Qu’avez-vous réussi ? Qu’auriez-vous pu mieux faire ?
La sécurité d'abord ! La base motrice peut désormais détecter tous les obstacles sur son chemin et réagir en conséquence.