Saisir et libérer
Il nous faut des outils motorisés.
Des outils motorisés peuvent être ajoutés aux robots afin de leur permettre d'effectuer différentes tâches. Nous devons donc identifier les bons outils pour cette mission.
De quels outils motorisés la base motrice a-t-elle besoin pour déplacer des objets ?
Construisez le cuboïde ainsi que ces extensions.
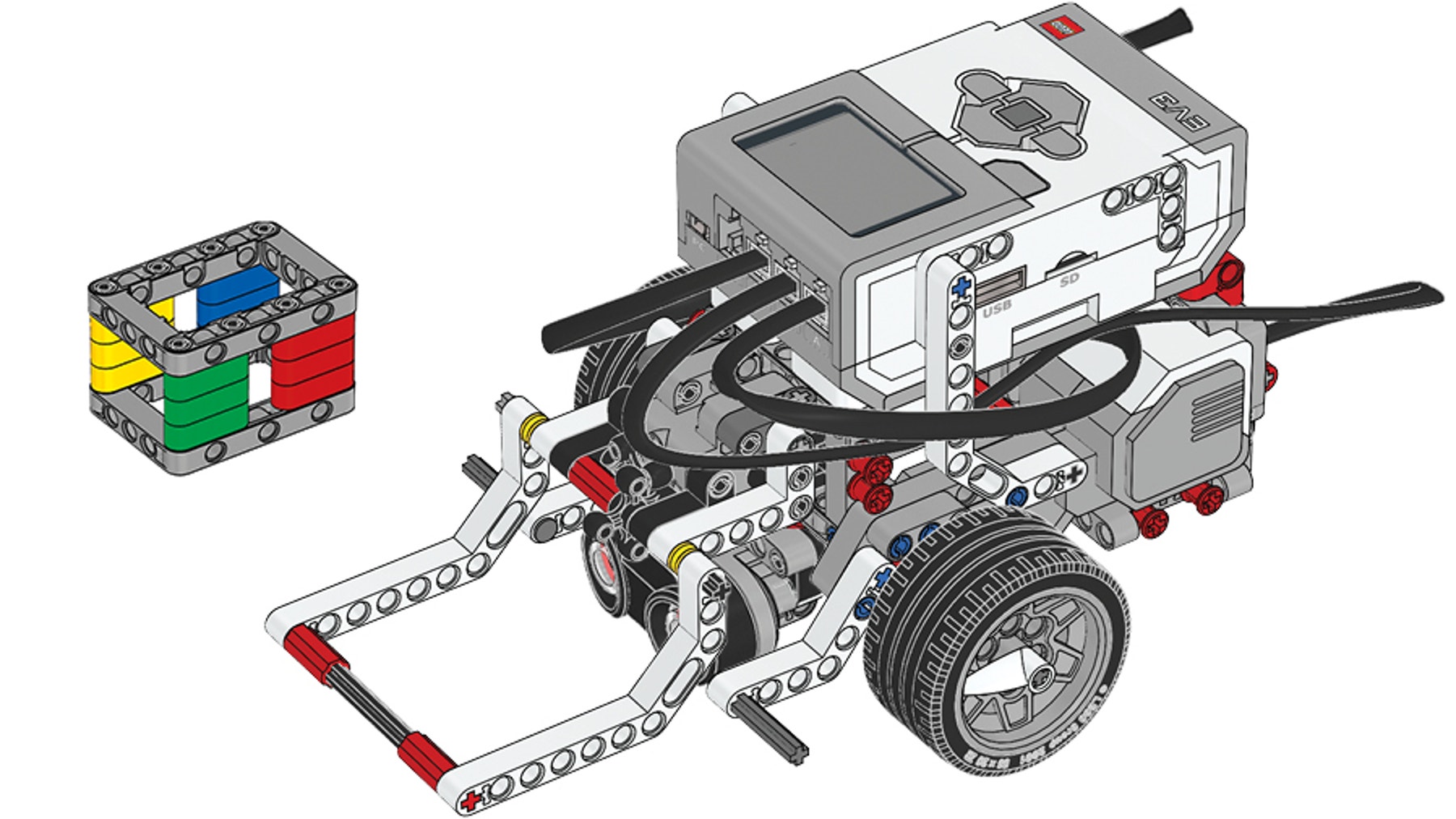
Nous utiliserons l'extension de moteur moyen pour saisir et libérer le cuboïde, ainsi que l'extension de capteur à ultrasons utilisée lors de la dernière leçon. Construisez le cuboïde, puis construisez les extensions sur la base motrice.
Exécutez ces piles de programmation les unes après les autres.


Que constatez-vous ? Essayez de placer le cuboïde dans différentes positions.
Quelles sont les principales caractéristiques et limitations de l'extension de moteur moyen ?
À vous !

Utilisez les blocs des piles de programmation présentes dans la trame de programmation pour créer un programme permettant à la base motrice de saisir le cuboïde, d’avancer sur quelques rotations, de libérer le cuboïde, puis de faire marche arrière pour revenir à son emplacement de départ.
C’est l’heure du défi !

Programmez la base motrice afin qu’elle utilise le capteur à ultrasons pour s'arrêter près du cuboïde, abaisser son bras, saisir le cuboïde et le ramener à son emplacement de départ.
Comment cela s’est-il passé ?

Qu’avez-vous réussi ? Qu’auriez-vous pu mieux faire ?
Vous avez réussi ! Vous savez désormais saisir et libérer des objets, afin de les déplacer.