Rotation avec capteur
Votre mission consiste à programmer votre robot pour qu'il fasse un tour sur lui-même en décrivant l'angle exact prévu en utilisant le capteur gyroscopique.
Procédure
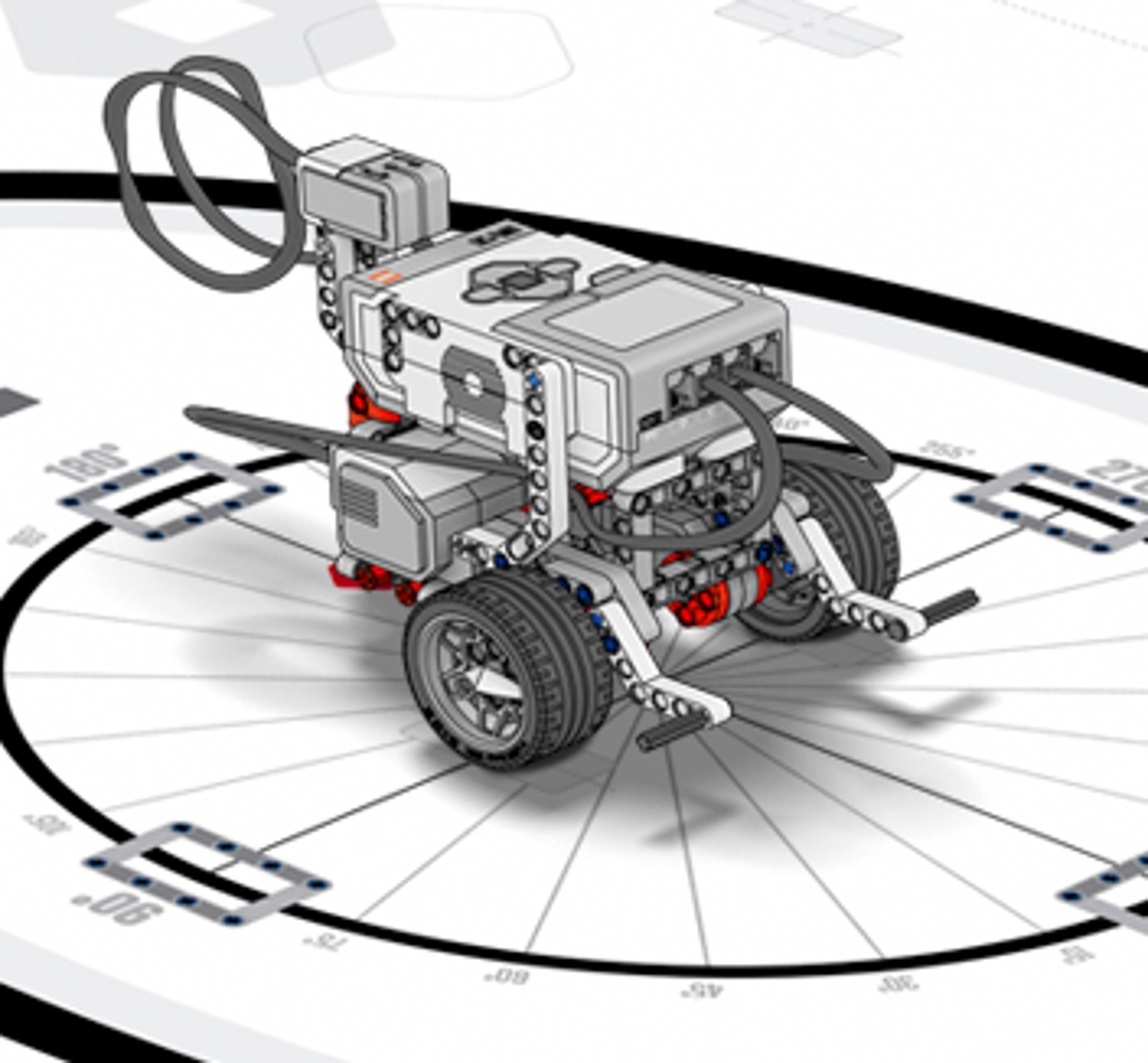
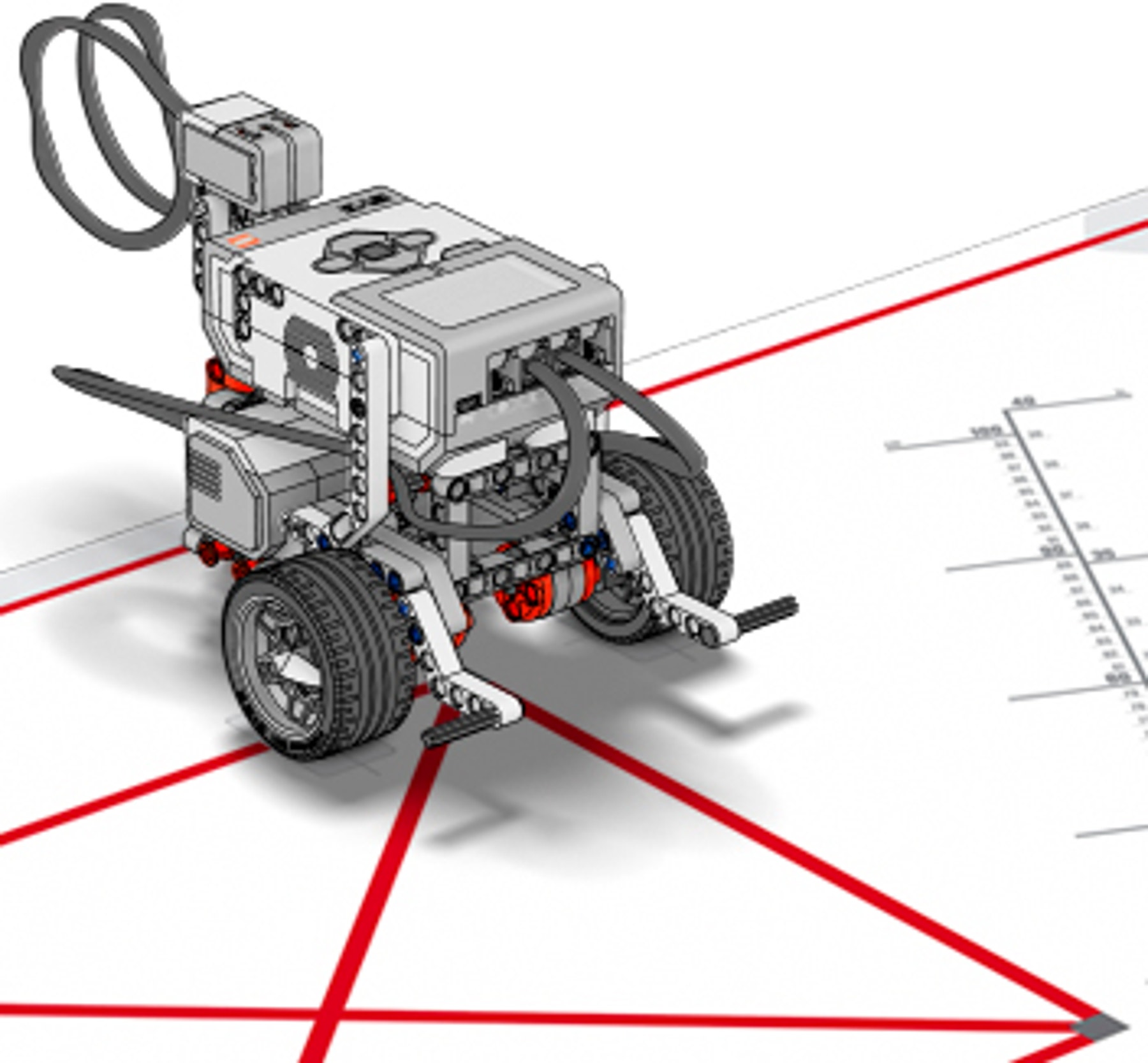
- Construisez votre robot.
- Créez votre programme.
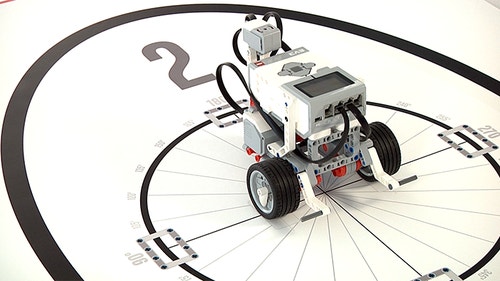
- Placez le robot sur la position 2 du tapis 2 et exécutez le programme.
- Documentez vos découvertes.
- Continuez à vous familiariser avec l'utilisation du capteur gyroscopique pour commander les mouvements du robot.
Avant de commencer cette mission, il peut être utile de visionner les didacticiels Robot Educator suivants :
- Arrêt en fonction d'un angle
- Boucle
Durant cette mission, les étudiants vont étudier la relation entre les données fournies par le capteur et le comportement du robot. La rotation de la base motrice va être commandée par le capteur gyroscopique.
Observez les étudiants pour déterminer :
• s'ils utilisent la terminologie adéquate ;
• s'ils identifient la fonction des blocs de programmation ;
• s'ils trouvent une bonne méthode pour vérifier l'angle de rotation de leur robot ;
• s'ils comprennent quels facteurs ont un impact sur la précision lors de l'utilisation du capteur gyroscopique (marge d'erreur du capteur, jeu du moteur et moment cinétique de rotation).
Se connecter
(5 min.)
Les rotations ne sont pas très précises avec les roues. Si vous essayez de faire tourner le robot dans la poussière ou sur une surface glissante, il risque de ne pas décrire l'angle prévu. Le capteur gyroscopique permet des mouvements plus précis.
Votre mission consiste à programmer votre robot pour qu'il fasse un tour sur lui-même en décrivant l'angle exact prévu en utilisant le capteur gyroscopique.
Construire
(20 min.)
Construisez votre robot
Cliquez sur les liens ci-dessous pour accéder aux instructions de montage, puis construisez le modèle et revenez à ce projet pour continuer. Si le modèle est déjà construit, sautez cette étape.
IMPORTANT :
Veillez à ce que le capteur gyroscopique et la brique EV3 restent stables lorsque vous branchez le câble et au démarrage de la brique.
Créez votre programme
Reproduisez le programme ci-dessous et téléchargez-le sur la brique.

Récapitulatif du programme
Démarrer
Déplacement char – Puissance B [10], Puissance C [-10]
Attendre – Capteur gyroscopique – Comparer – Angle – Type [3] (Supérieur ou égal à), Degrés [90]
Déplacement char – Désactivé
Résolution des problèmes
L'angle doit être ajusté ; en général, la valeur doit être inférieure à 90 degrés.
Théorie
Lorsque le robot utilise le capteur gyroscopique, la valeur de rotation écrite par le bloc du capteur correspond à la rotation de la base. La précision du capteur est de +/-3 degrés.
Le jeu du moteur et le retard causé par l'arrêt du moment cinétique de rotation peuvent aussi avoir un impact sur la précision.
L'autonomie de la batterie, la taille des roues, le frottement du robot sur la surface et la distance entre les deux roues ne sont plus des facteurs pouvant avoir un impact sur la précision de la rotation du robot.
Comprendre
(20 min.)
Exécutez votre programme et observez
Placez votre robot sur la position de départ 2 du tapis 2 et exécutez votre programme.
Documentez vos découvertes
- Expliquez ici ce que chaque bloc de programmation a fait.
Mon robot a tourné sur lui-même jusqu'à ce que le capteur gyroscopique lise une valeur de 90 degrés et arrête le robot. - Estimez l'angle de rotation de votre robot.
Mon robot a tourné sur environ 90 degrés. - Expliquez la différence entre la rotation de votre robot avec et sans capteur gyroscopique.
La rotation contrôlée par le capteur gyroscopique est associée à moins de facteurs d'incertitude sur mon robot.
Observez et modifiez
Modifiez votre programme pour que le robot tourne sur lui-même :
- Sur 45 degrés dans le sens des aiguilles d'une montre
- Sur 180 degrés dans le sens des aiguilles d'une montre
- Sur 360 degrés dans le sens des aiguilles d'une montre, puis dans le sens inverse sur 360 degrés
Sur quel angle votre robot a-t-il tourné, par rapport à ce que le programme prévoyait ?
L'angle a été plus grand en raison du moment cinétique.
Mission
Faites tourner votre robot sur 45 degrés dans le sens des aiguilles d'une montre.

Solution - Récapitulatif du programme
Démarrer
Déplacement char – Puissance B [10], Puissance C [-10]
Attendre – Capteur gyroscopique – Comparer – Angle – Type [3] (Supérieur ou égal à), Degrés [45]
Déplacement char – Désactivé
Résolution des problèmes
L'angle doit être ajusté ; en général, la valeur doit être inférieure à 45 degrés.
Mission
Faites tourner votre robot sur 180 degrés dans le sens des aiguilles d'une montre.

Récapitulatif du programme
Démarrer
Déplacement char – Puissance B [10], Puissance C [-10]
Attendre – Capteur gyroscopique – Comparer – Angle – Type [3] (Supérieur ou égal à), Degrés [180]
Déplacement char – Désactivé
Résolution des problèmes
L'angle doit être ajusté ; en général, la valeur doit être inférieure à 180 degrés.
Mission
Faites tourner votre robot sur 360 degrés dans le sens des aiguilles d'une montre, puis dans le sens inverse sur 360 degrés.

Récapitulatif du programme
Démarrer
Déplacement char – Puissance B [10], Puissance C [-10]
Attendre – Capteur gyroscopique – Comparer – Angle – Type [3] (Supérieur ou égal à), Degrés [360]
Déplacement char – Désactivé
Attendre – Secondes [2]
Déplacement char – Puissance B [10], Puissance C [-10]
Attendre – Capteur gyroscopique – Comparer – Angle – Type [5] (Inférieur ou égal à), Degrés [0]
Déplacement char – Désactivé
Continuer
(15 min.)
Continuez l'exploration
Créez un programme en utilisant une boucle pour que votre robot décrive un carré.
Une fois que vous êtes prêt, essayez votre programme sur la position de départ 4 du tapis d'apprentissage 1.

Récapitulatif du programme
Démarrer
Boucle – Compteur [4]
Déplacement et direction – Degrés [682], Puissance [30]
Attendre – Temps [1 s]
Déplacement char – Activé, Puissance B [10], Puissance C [-10]
Attendre – Capteur gyroscopique – Modifier – Angle – Direction [0] (Augmentation), Degrés [85]
Déplacement char – Désactivé
Attendre – Temps [1 s]
Résolution des problèmes
L'angle doit être ajusté ; en général, la valeur doit être inférieure à 90 degrés.
Expliquez à quoi peut servir une boucle.
Je peux utiliser la structure avec une boucle pour répéter des actions.
Facultatif
1.Créez un programme qui fait décrire un triangle au robot. Une fois que vous êtes prêt, essayez votre programme sur la position de départ 4 du tapis 1.
2.Programmez votre robot pour qu'il décrive d'autres formes.

Vous pouvez désormais utiliser le capteur gyroscopique pour faire des rotations. Bien joué !
Support pour l’enseignant
Objectifs d'apprentissage
Sciences et ingénierie
• Modèles
• Cause et effet : mécanisme et explication
Maths
• Résoudre des problèmes réels et mathématiques impliquant la mesure d'angles, de surfaces et de volumes
• Tendre vers le raisonnement répété et pouvoir l'exprimer
Apprentissage de la robotique
• Maîtrise des déplacements du robot à l'aide du capteur gyroscopique
• Compréhension de la différence entre la programmation passive et la programmation réactive avec des capteurs
• Avantages et limites des capteurs
Set de base LEGO MINDSTORMS EV3
EV3 Lab ou EV3 Programming
Ensemble EV3 Conquête de l’espace