Tentativi ed errori
Il risultato è sufficiente?
Nessuna macchina è perfetta. Gli ingegneri si impegnano a rendere le macchine più precise e accurate possibile, ma occorre tenere sempre in considerazione un certo margine di errore.
Quali fattori determinano il limite di errore accettabile?
Costruisci il *robot di molatura*.
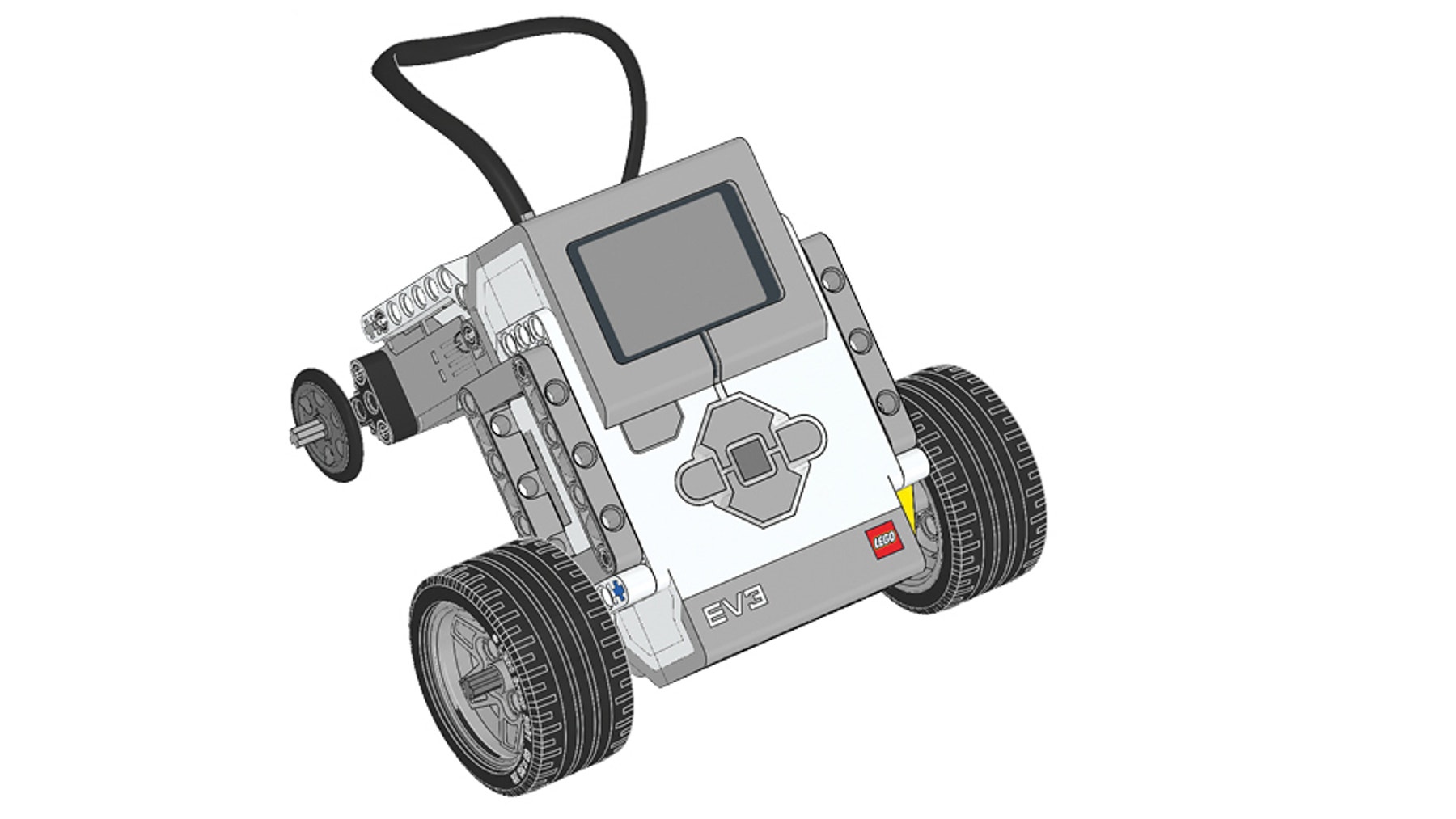
Questo ti consentirà di scoprire quali aspetti del progetto e del programma possono causare imprecisioni.
Esegui una serie di test.


Posiziona il modello su una superficie solida e livellata e segnane la posizione iniziale. Esegui il programma e, quando il modello smette di muoversi, segna la posizione finale.
Il robot di molatura si sposta di 100 cm? Le rotazioni del motore calcolate ed effettive e la distanza percorsa calcolata (in cm) sono visualizzate sul display?
Registra i risultati.

Registra il numero dell'esperimento e la distanza percorsa calcolata e quella misurata in una tabella di test. Assicurati di lasciare spazio sufficiente per colonne aggiuntive al fine di effettuare ulteriori calcoli.
Esegui l'esperimento utilizzando il modello e il programma predefiniti. Ripeti l'esperimento per ogni regolazione effettuata in modo da studiarne l'effetto.
Esecuzione dell'esperimento
Durante l'esperimento, tieni presenti i seguenti suggerimenti:
- Le rotazioni del motore calcolate ed effettive e la distanza percorsa calcolata (in cm) verranno visualizzate sul display.
- Esegui l'esperimento almeno tre volte e utilizza i valori medi per ottenere risultati più affidabili.
Riepiloga i risultati.

Utilizza la distanza media misurata per ciascuna delle regolazioni che hai apportato e calcola l'errore per scoprire qual era la versione più accurata.
Quali regolazioni apportate al progetto e al programma del robot hanno influito maggiormente sulla sua precisione?
Com'è andata?

Cosa hai eseguito correttamente? Cè qualcosa che avresti potuto fare meglio?
Fantastico! Ora sai come migliorare la precisione di un robot. Passiamo alla lezione successiva.