Raccogli e rilascia
Ci occorrono degli attrezzi motorizzati.
Gli attrezzi motorizzati possono essere collegati ai robot per consentire loro di eseguire diversi compiti. Adesso dobbiamo trovare l'attrezzo giusto per il lavoro da svolgere.
Di quali attrezzi motorizzati ha bisogno la tua struttura motrice per spostare gli oggetti?
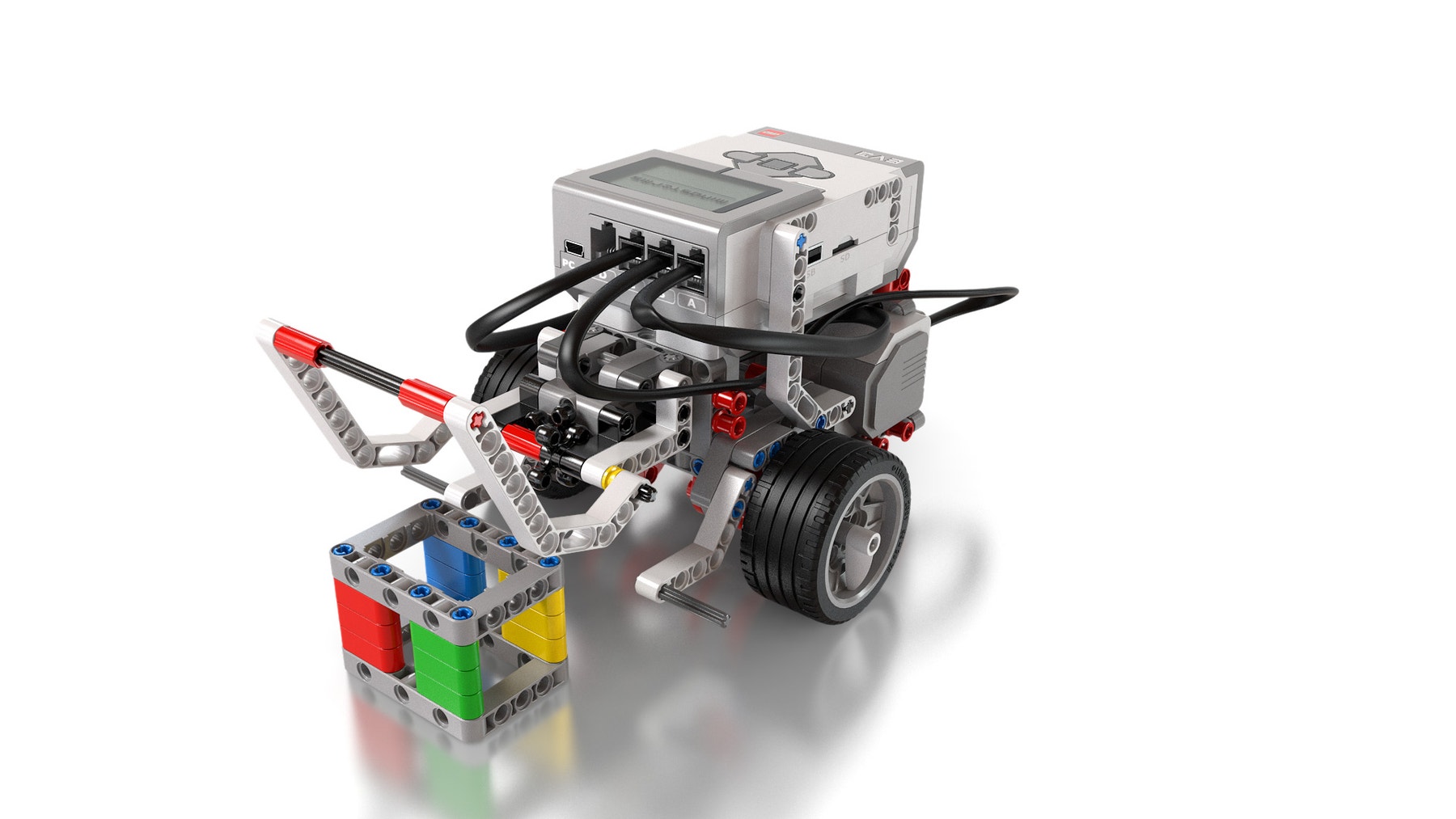
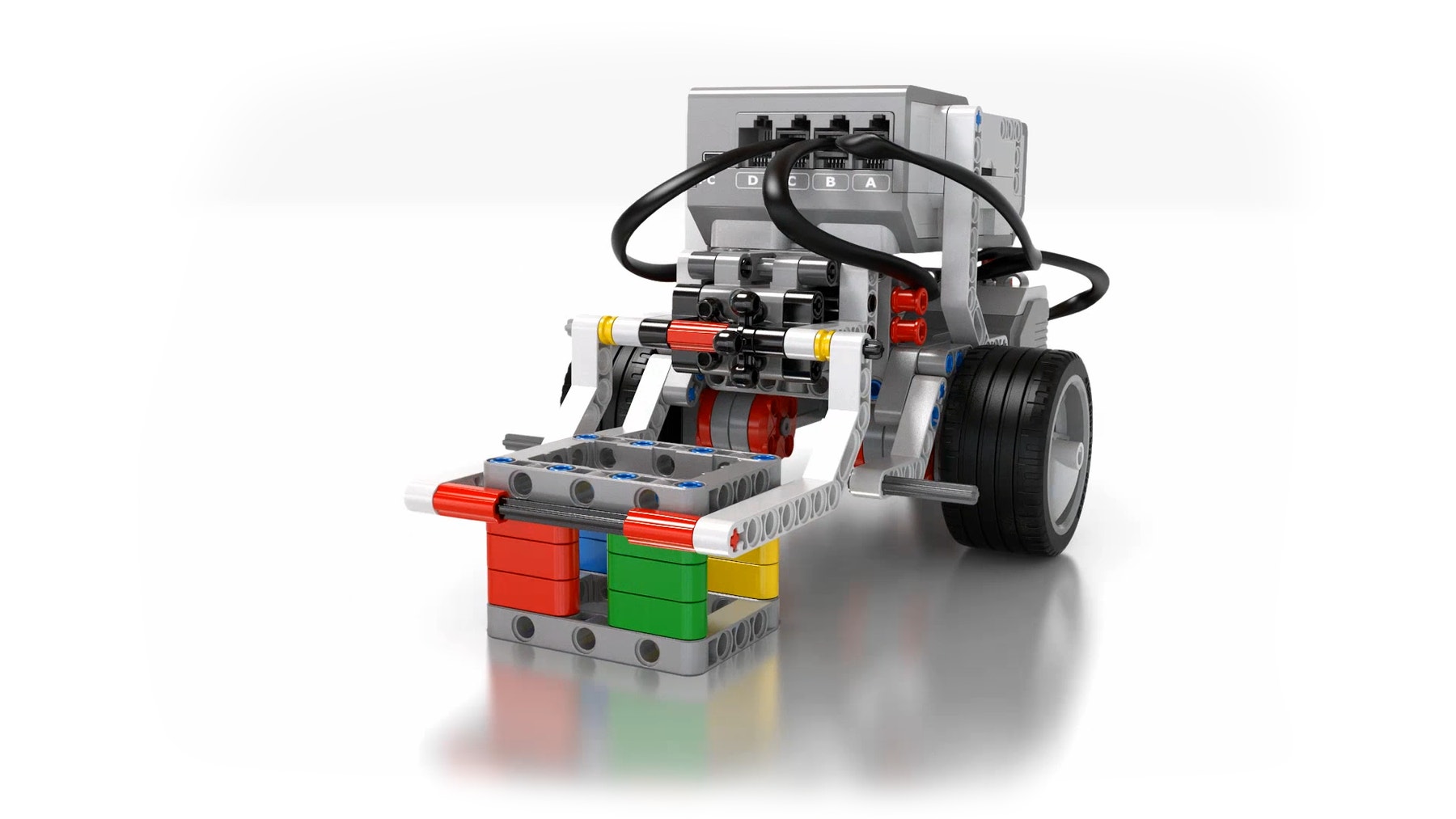
Costruisci il cuboide e queste estensioni.
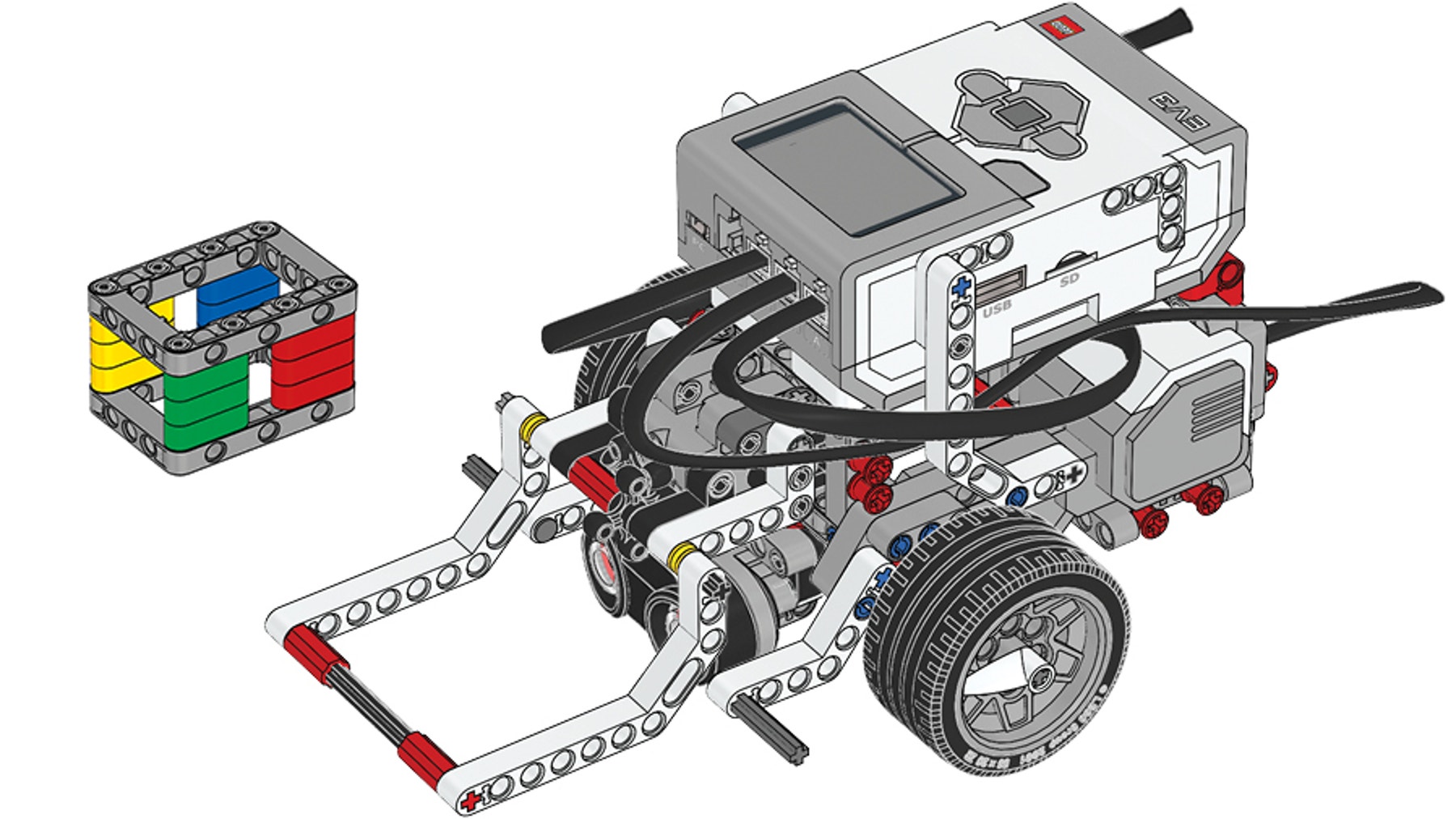
Utilizzeremo l'estensione motore medio per afferrare e rilasciare il cuboide. Ti occorrerà anche l'estensione sensore ad ultrasuoni dell'ultima lezione. Costruisci prima il cuboide e quindi le estensioni sulla struttura motrice.
Prova questi stack di programmazione uno dopo l'altro.

Cosa vedi? Prova a collocare il cuboide in diverse posizioni.
Quali sono le caratteristiche e le limitazioni principali dell'estensione motore medio?
Ora tocca a te!
Utilizza i blocchi degli stack di programmazione già presenti nell'Area di programmazione per creare un programma che consenta di afferrare il cuboide, procedere in avanti per alcune rotazioni, rilasciare il cuboide e infine invertire la direzione per tornare alla posizione di partenza.
È il momento di affrontare una sfida!

Programma la struttura motrice in modo che utilizzi il sensore ad ultrasuoni per fermarsi vicino al cuboide e abbassare il braccio per raccoglierlo e riportarlo alla posizione di partenza.
Com'è andata?
Cosa hai eseguito correttamente? Cè qualcosa che avresti potuto fare meglio?
Ecco fatto! Ora puoi afferrare e rilasciare oggetti, spostandoli dove desideri.