Il robot della fabbrica
I robot autonomi svolgono diversi compiti all'interno della fabbrica LEGO^®^.


Uno degli incarichi consiste nello spostare scatole tra le diverse postazioni di lavoro. Questi robot sono persino in grado di tornare a una stazione di ricarica quando il livello della batteria si riduce e svolgono i propri compiti in modo efficiente, senza urtare contro pareti, persone o altri robot.
Pensi che la struttura motrice potrebbe essere utilizzata per eseguire compiti simili?
Ecco una bella sfida!
Progetta e costruisci estensioni sulla struttura motrice e programmala per:
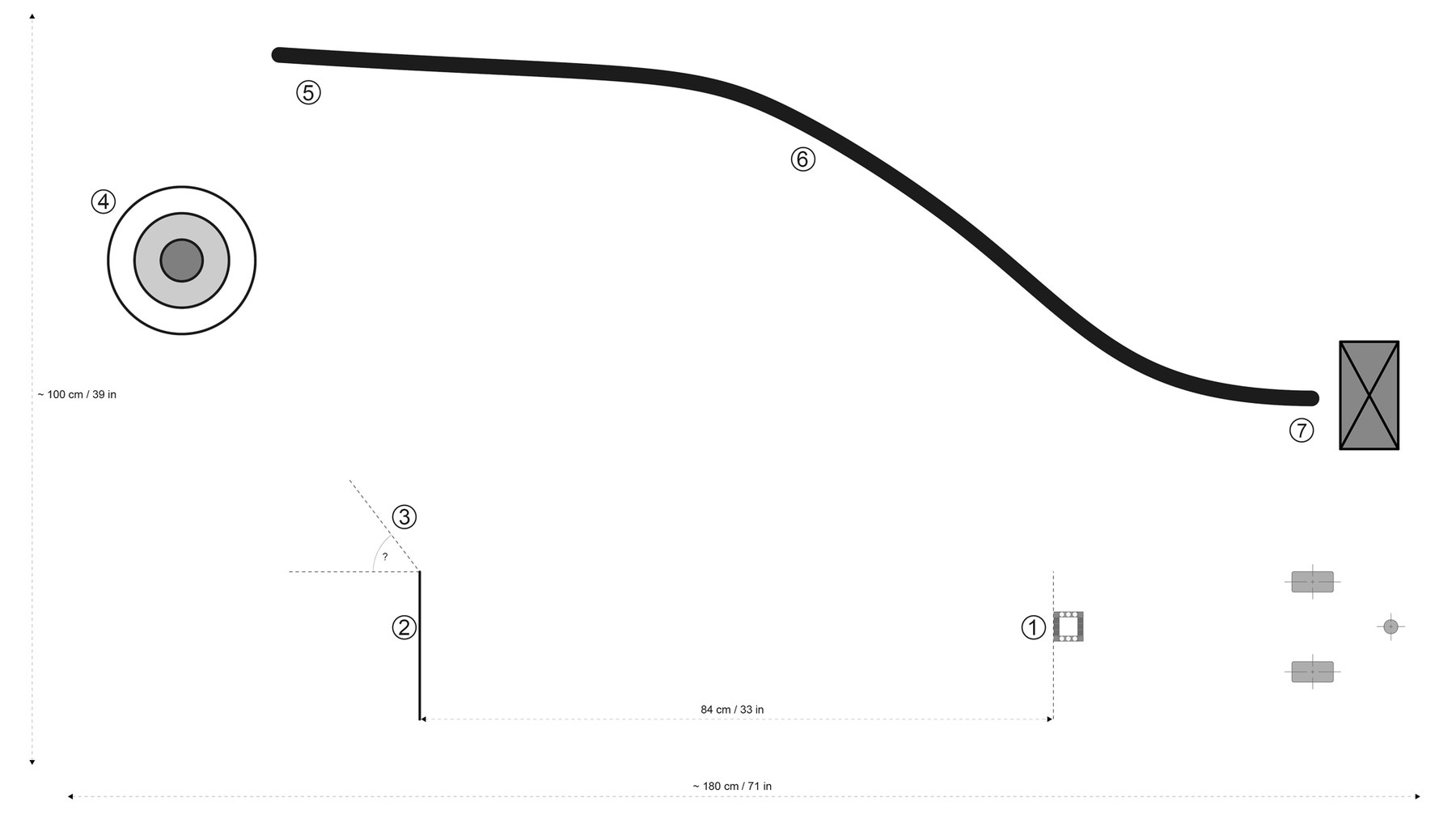
- Afferrare il cuboide e portarlo il più vicino possibile al centro della zona di consegna per poi rilasciarlo.
- Rilevare e seguire la linea che porta alla stazione di ricarica, fermandosi il più vicino possibile all'oggetto di grandi dimensioni, senza tuttavia toccarlo.
Rilascia il pacco nella zona di consegna.

Cerca nuove idee e perfeziona il tuo robot fino a quando sarai pronto a testare la soluzione che hai creato per afferrare il cuboide e rilasciarlo al centro della zona di consegna.
Suggerimento per il brainstorming
È possibile dividere il compito principale in attività secondarie di minore entità e trovare insieme le risposte a domande quali:
- In che modo il robot può afferrare il cuboide?
- In che modo il robot può raggiungere il centro della zona di consegna?
- Quale delle estensioni delle lezioni precedenti potrebbe risultare utile per tali compiti?
Segui la linea fino alla stazione di ricarica.
Cerca nuove idee e perfeziona il tuo robot fino a quando sarà pronto a testare la soluzione che hai creato per seguire la linea che porta alla stazione di ricarica, fermandosi proprio di fronte all'oggetto di grandi dimensioni.
Suggerimento per il brainstorming
È possibile dividere il compito principale in attività secondarie di minore entità e trovare insieme le risposte a domande quali:
- In che modo il robot può rilevare e seguire la linea?
- In che modo il robot può smettere di seguire la linea dopo essere arrivato il più vicino possibile all'oggetto di grandi dimensioni?
- Quale delle estensioni delle lezioni precedenti potrebbe risultare utile per tali compiti?
Porta a termine la sfida:

Colloca il robot nella posizione di partenza e scopri se è in grado di:
- Afferrare il cuboide e rilasciarlo al centro della zona di consegna
- Seguire la linea fino alla stazione di ricarica
Com'è andata?

Cosa hai eseguito correttamente? Cè qualcosa che avresti potuto fare meglio?
Fantastico! Ora hai il controllo della struttura motrice, che è pronta per essere utilizzata in fabbrica!