Curva con l’uso del sensore
La tua missione consiste nel programmare il robot in modo che completi un giro sul posto fino a un'angolazione esatta utilizzando il sensore giroscopico.
Procedura
- Costruire il robot.
- Creare il programma.
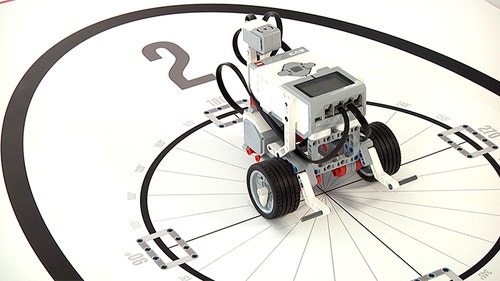
- Collocare il robot nella posizione 2 sul tappetino 2 ed eseguire il programma.
- Documentare le scoperte.
- Apprendere ulteriori informazioni sull'uso del sensore giroscopico per controllare i movimenti del robot.
Durante questa missione gli studenti esamineranno la relazione tra l’input del sensore e il comportamento del robot. Le rotazioni della base motrice saranno controllate dal sensore giroscopico.
Osservare gli studenti per determinare se
Usano la terminologia corretta;
Riconoscono la funzione dei blocchi di programmazione;
Individuano modi validi per testare l’angolo di rotazione del rispettivo robot e
Sono consapevoli dei fattori che possono influenzare la precisione allo stop quando si utilizza un sensore giroscopico (tolleranza del sensore, gioco del motore e momento angolare).
Connetti
(5 min.)
Le curve effettuate con una ruota non sono molto precise. Se si cerca di far girare il robot su una superficie polverosa e scivolosa, è possibile che non raggiunga l'angolazione corretta. Il sensore giroscopico consente di effettuare movimenti molto più precisi.
La tua missione consiste nel programmare il robot in modo che completi un giro sul posto fino a un'angolazione esatta utilizzando il sensore giroscopico.
Costruisci
(20 min.)
Costruisci il tuo robot
Fare clic sui collegamenti riportati di seguito per visualizzare le istruzioni di montaggio, quindi costruire il modello e tornare al progetto per continuare. Ignorare questo passaggio se il modello è già costruito.
IMPORTANTE:
Tenere fermi il sensore giroscopico e il mattoncino EV3 quando si collega il cavo e durante l'avvio del mattoncino EV3.
Creare il programma
Ricreare il programma illustrato e scaricarlo nel robot.

Panoramica del programma
Avvio
Movimento tipo cingolato - Potenza B[10], Potenza C[-10]
Attesa - Sensore giroscopico - Confronto angolo - Tipo[3] (Maggiore di o Uguale a), Gradi [90]
Movimento tipo cingolato - Off
Risoluzione dei problemi
È necessario regolare l'angolo; solitamente il valore deve essere minore di 90 gradi.
Teoria
Quando si utilizza il sensore giroscopico, il valore della rotazione scritto nel blocco del sensore corrisponde alla rotazione della base motrice. La precisione del sensore è di +/- 3 gradi.
Il gioco del motore e il ritardo causato dall'arresto del momento angolare può influire anche sulla precisione.
La potenza della batteria, le dimensioni della ruota, l'attrito tra il robot e la superficie, la distanza tra due ruote non sono più fattori che possono influenzare la precisione della rotazione del robot.
Osserva
(20 min.)
Eseguire il programma e osservare.
Collocare il robot nella posizione di avvio 2 sul tappetino 2, quindi eseguire il programma.
Documenta le tue scoperte
- Descrivere qui le azioni compiute da ciascun blocco di programmazione:
Il mio robot ha girato sul posto fino a quando il sensore giroscopico non ha letto il valore di 90 gradi e si è fermato. - Stimare l'angolo di rotazione del robot:
Il mio robot ha girato di circa 90 gradi. - Spiegare la differenza tra la rotazione del robot con e senza il sensore giroscopico:
La rotazione controllata dal sensore giroscopico è influenzata da meno fattori di incertezza.
Osserva e modifica
Ricostruire il programma per fare in modo che il robot compia i seguenti giri sul posto:
- 45 gradi in senso orario
- 180 gradi in senso orario
- 360 gradi in senso orario, seguiti da un giro sul posto in senso antiorario di 360 gradi
Di quanto ha ruotato il robot rispetto al valore indicato dal programma?
Ha ruotato tipicamente di più a causa del momento angolare.
Attività
Far girare il robot in senso orario di 45 gradi.

Soluzione - Panoramica del programma
Avvio
Movimento tipo cingolato - Potenza B[10], Potenza C[-10]
Attesa - Sensore giroscopico - Confronto angolo - Tipo[3] (Maggiore di o Uguale a), Gradi [45]
Movimento tipo cingolato - Off
Risoluzione dei problemi
È necessario regolare l'angolo; solitamente il valore deve essere minore di 45 gradi.
Attività
Far girare il robot in senso orario di 180 gradi.

Soluzione - Panoramica del programma
Avvio
Movimento tipo cingolato - Potenza B[10], Potenza C[-10]
Attesa - Sensore giroscopico - Confronto angolo - Tipo[3] (Maggiore di o Uguale a), Gradi [180]
Movimento tipo cingolato - Off
Risoluzione dei problemi
È necessario regolare l'angolo; solitamente il valore deve essere minore di 180 gradi.
Attività
Far girare il robot di 360 gradi in senso orario, seguiti da un giro sul posto in senso antiorario di 360 gradi.

Soluzione - Panoramica del programma
Avvio
Movimento tipo cingolato - Potenza B[10], Potenza C[-10]
Attesa - Sensore giroscopico - Confronto angolo - Tipo[3] (Maggiore di o Uguale a), Gradi [360]
Movimento tipo cingolato - Off
Attesa - Secondi[2]
Movimento tipo cingolato - Potenza B[10], Potenza C[-10]
Attesa - Sensore giroscopico - Confronto angolo - Tipo[5] (Minore di o Uguale a), Gradi [0]
Movimento tipo cingolato - Off
Continua
(15 min.)
Continua a esplorare
Creare un nuovo programma utilizzando un ciclo per fare in modo che il robot si muova descrivendo un quadrato.
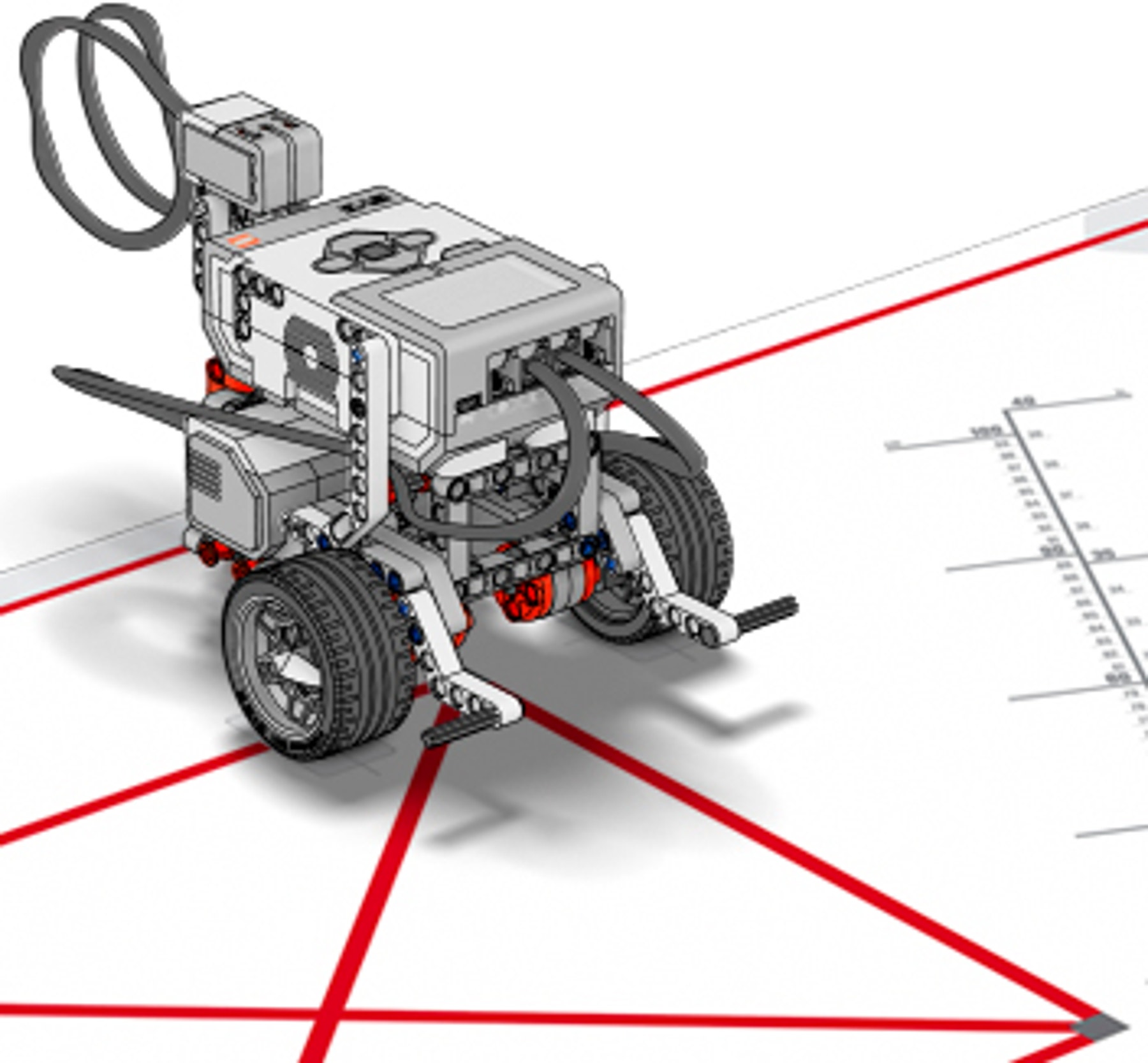
Quando si è pronti, testare il programma nella posizione di avvio 4 sul tappetino didattico 1.

Soluzione - Panoramica del programma
Avvio
Ciclo - Conteggio [4]
Movimento con controllo sterzo - Gradi[682], Potenza[30]
Attesa - Tempo[1s]
Movimento tipo cingolato - On, Potenza B[10], Potenza C[-10]
Attesa - Sensore giroscopico - Cambia - Angolo - Direzione[0] (Aumento), Gradi [85]
Movimento tipo cingolato - Off
Attesa - Tempo[1s]
Risoluzione dei problemi
È necessario regolare l'angolo; solitamente il valore deve essere minore di 90 gradi.
Spiegare qui come può essere utilizzato un ciclo:
Si può utilizzare la struttura Ciclo per ripetere azioni.
Opzionale
1.Creare un nuovo programma in modo che il robot si muova descrivendo un triangolo. Quando si è pronti, testare il programma nella posizione di avvio 4 sul tappetino 1.
2.Programmare il robot in modo che si muova descrivendo altre forme.
Adesso sei in grado di utilizzare il sensore giroscopico per curvare. Ottimo lavoro!
Supporto per l'insegnante
Obiettivi di apprendimento
Scienze e Ingegneria
• Schemi
• Causa ed effetto: Meccanismo e spiegazione
Matematica:
• Risolvere problemi della vita reale e problemi matematici che implichino misura di angolo, area, superficie e volume.
• Ricercare ed esprimere regolarità nel ragionamento ripetitivo.
Nozioni di robotica:
• Controllo del movimento del robot mediante l'uso del sensore giroscopico
• Comprensione della differenza tra programmare semplicemente le uscite o basandosi sui valori dei sensori
• Vantaggi e limiti dei sensori
Set di base LEGO MINDSTORMS EV3
EV3 Lab o EV3 Programming
Set di Sfida spaziale EV3




