ギアチェンジ
ギアをチェンジするのはなぜでしょうか?
ギアシステムは、被駆動車輪を動かすのに必要な力の量を調整することができる仕組みです。乗り物を運転する際は、低いギアで発進し、速度が出て来たら高いギアにチェンジします。
ギアチェンジが役立つのはどのような状況ですか?
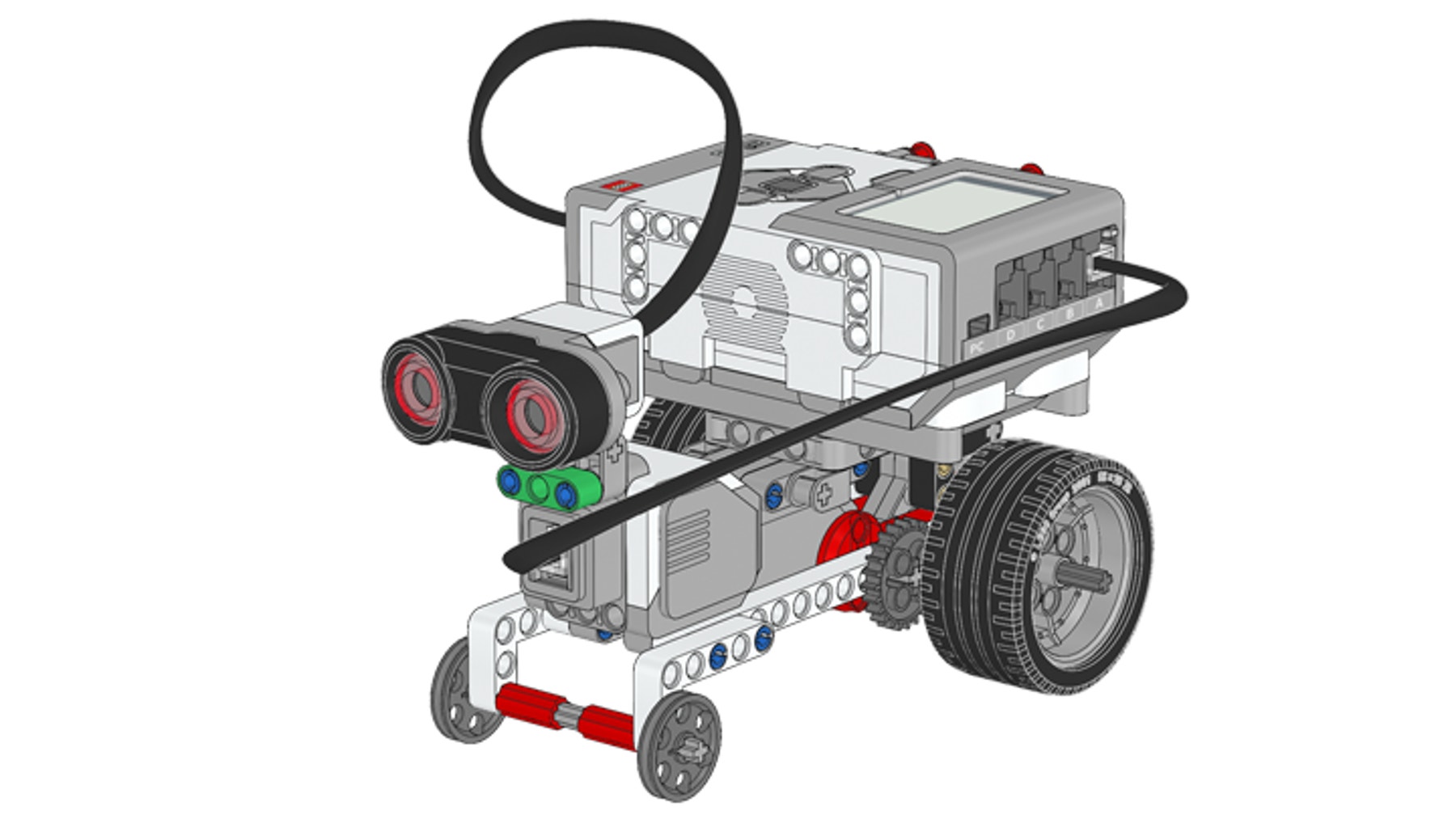
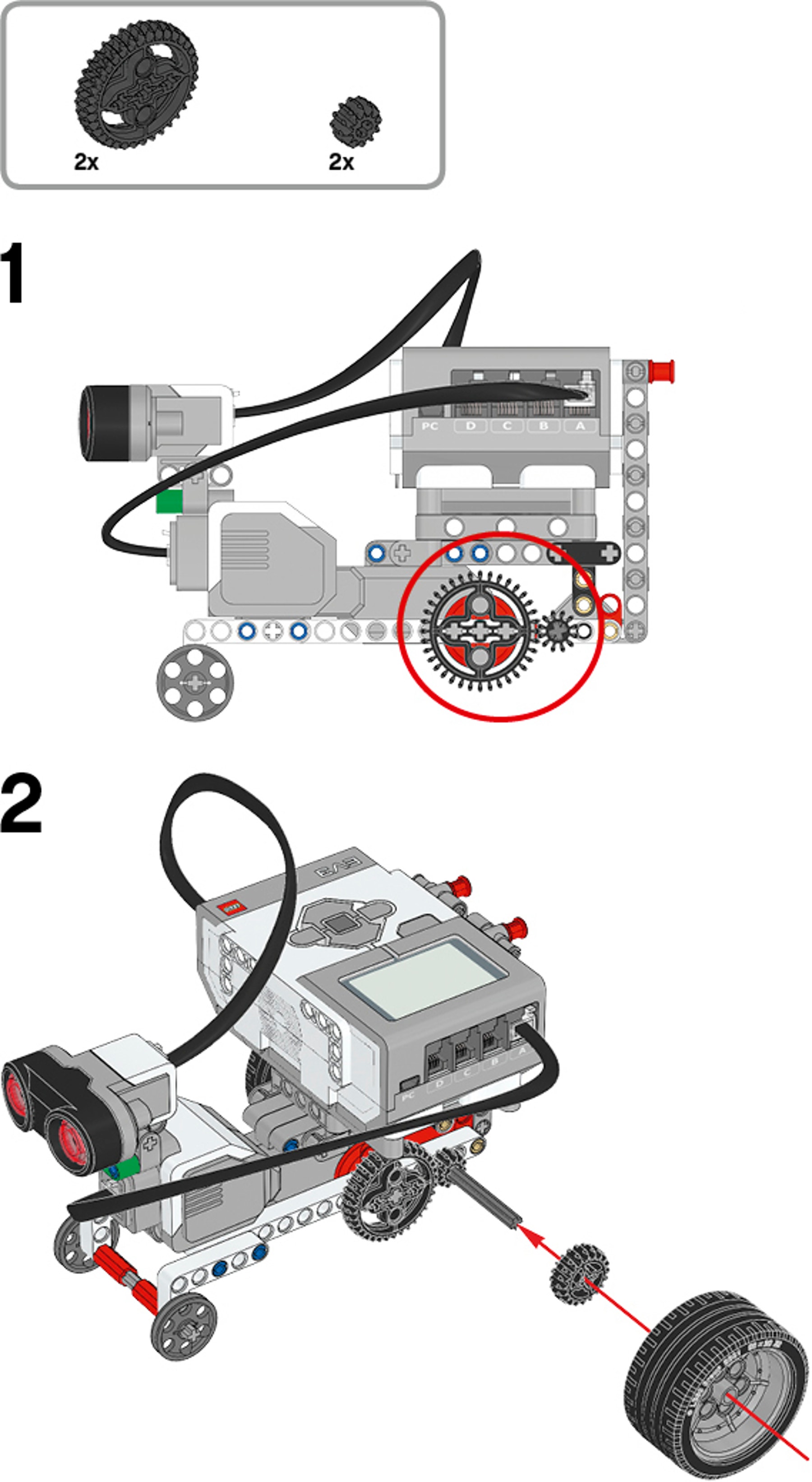
この *変速カー* を組み立てましょう。
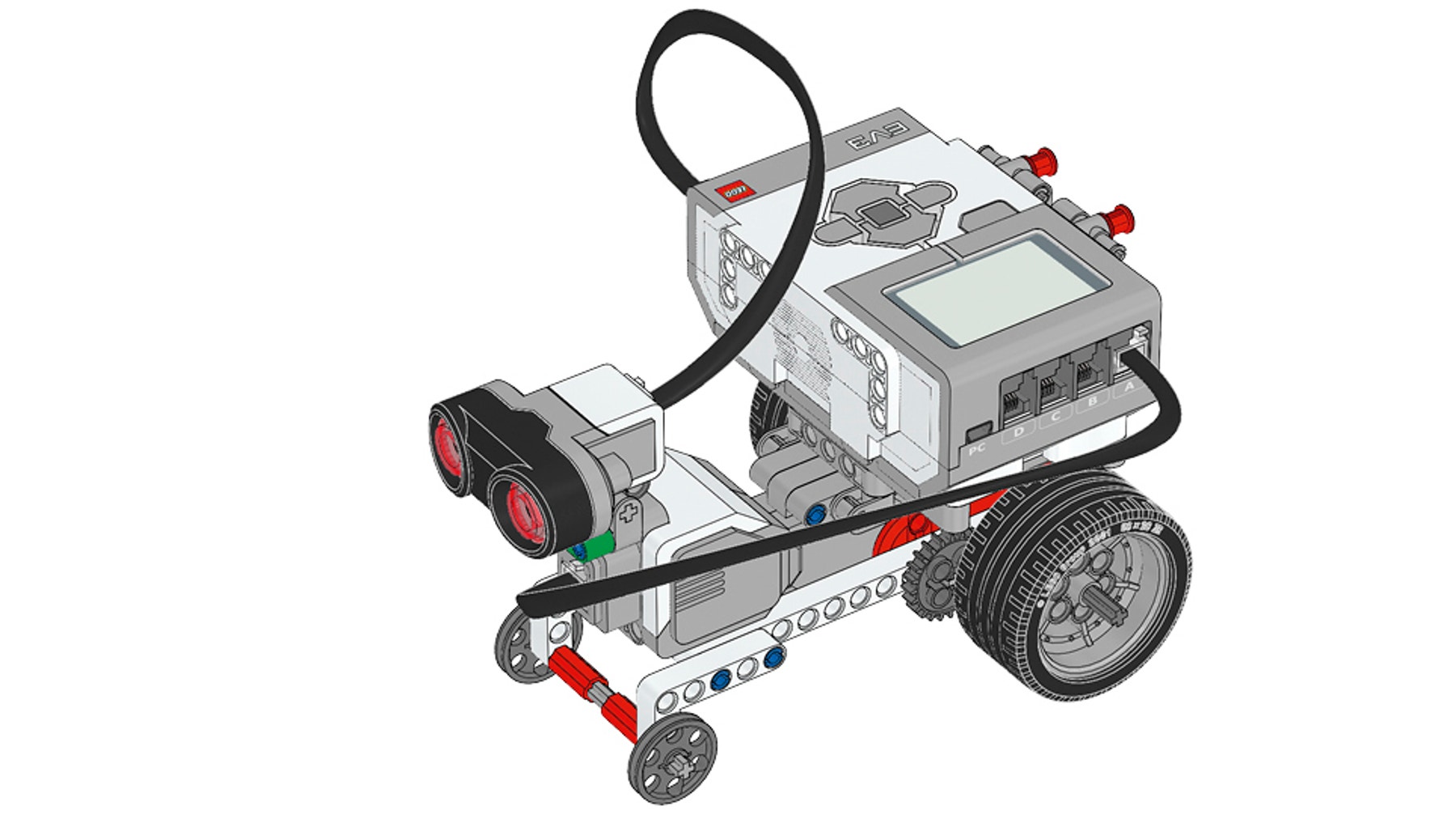
このロボットには切り替えできる複数のギア列があり、ギアチェンジの仕組みを実際に見ることができます!
テスト走行をしましょう。

モデルを水平で安定した場所に置きます。ギア上の針とモーター上の針の両方が上を向いていることを確認してください。プログラムを実行し、ギア上の針に注意しながら回転数を数えます。
この際、回転方向も確認してください。参照モーターが1回転し、両方のモーターが同時に回転を停止しますか?
超音波センサーを使う
超音波センサーはサウンドコーンを形成する音波パルスを発し、コーンの中にある物体を検出します。実験をはじめる際は、ロボットの隣や超音波センサーの検出圏内に立たないようにしてください。超音波センサーの背後に立つことをおすすめします。
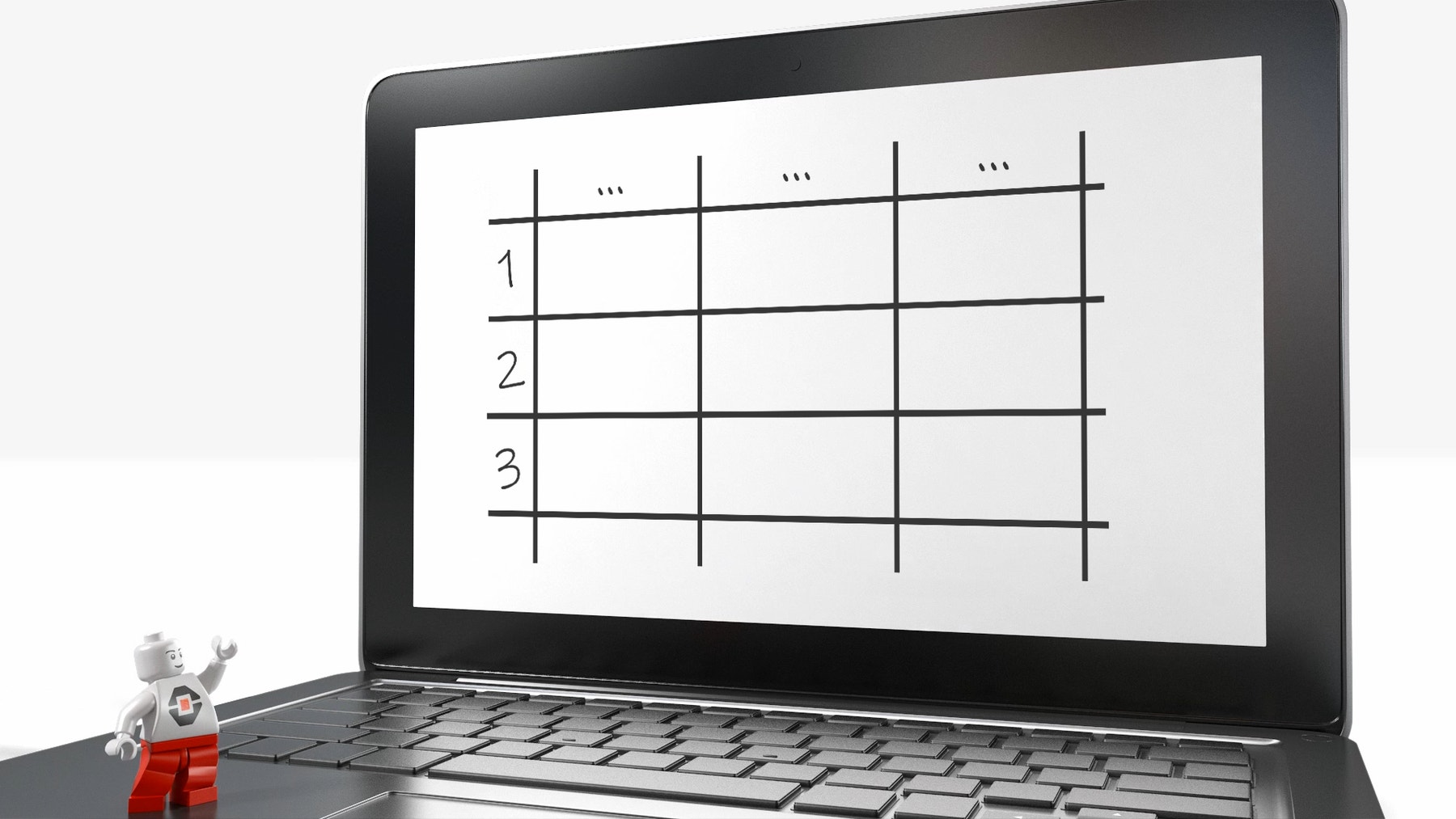
結果を記録しましょう。

実験の回数、ギア比、結果予測、移動距離、速度をチェック表に記録します。そのほかに気づいた点も記入できるよう、十分なスペースを空けておきます。
基本のギア構造を使って実験を行ってから、下の「ヒント」に記載されるすべてのギア列バリエーションに対して同じように実験を繰り返します。
実験を行う
実験を行う際は、以下のヒントに従うと上手くいきます:
- 移動距離 (cm)、速度 (m/秒)、回転速度 (毎秒回転数) がディスプレイに表示されます。
- ギア列の各バリエーションに対して実験を3回以上行い、平均値を用いることで実験結果の信頼性を高めます。
ギアチェンジ
基本のギア列を取り外します:
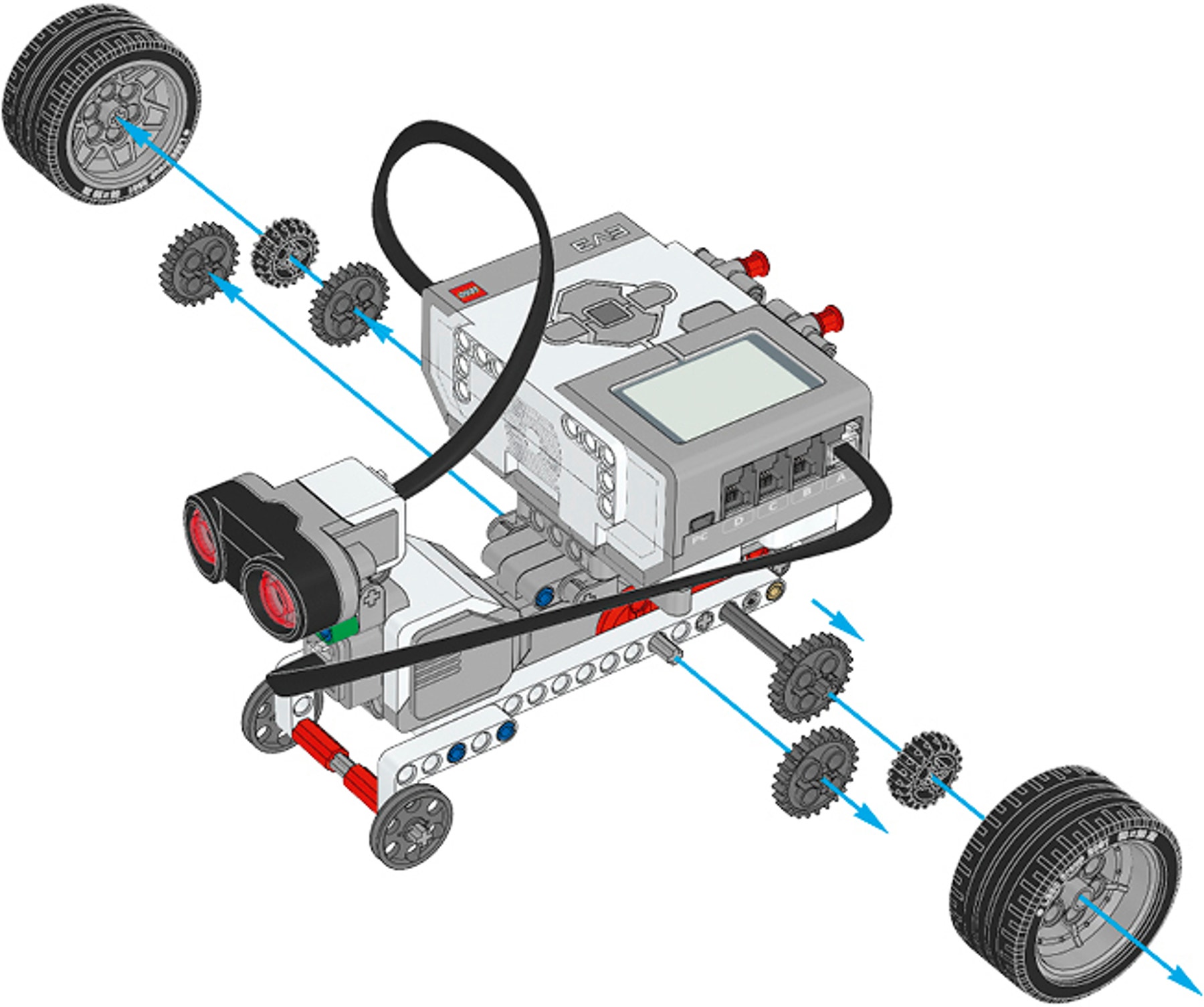
ダブルベベルギアを使って2番目のギア列を組み立てます:
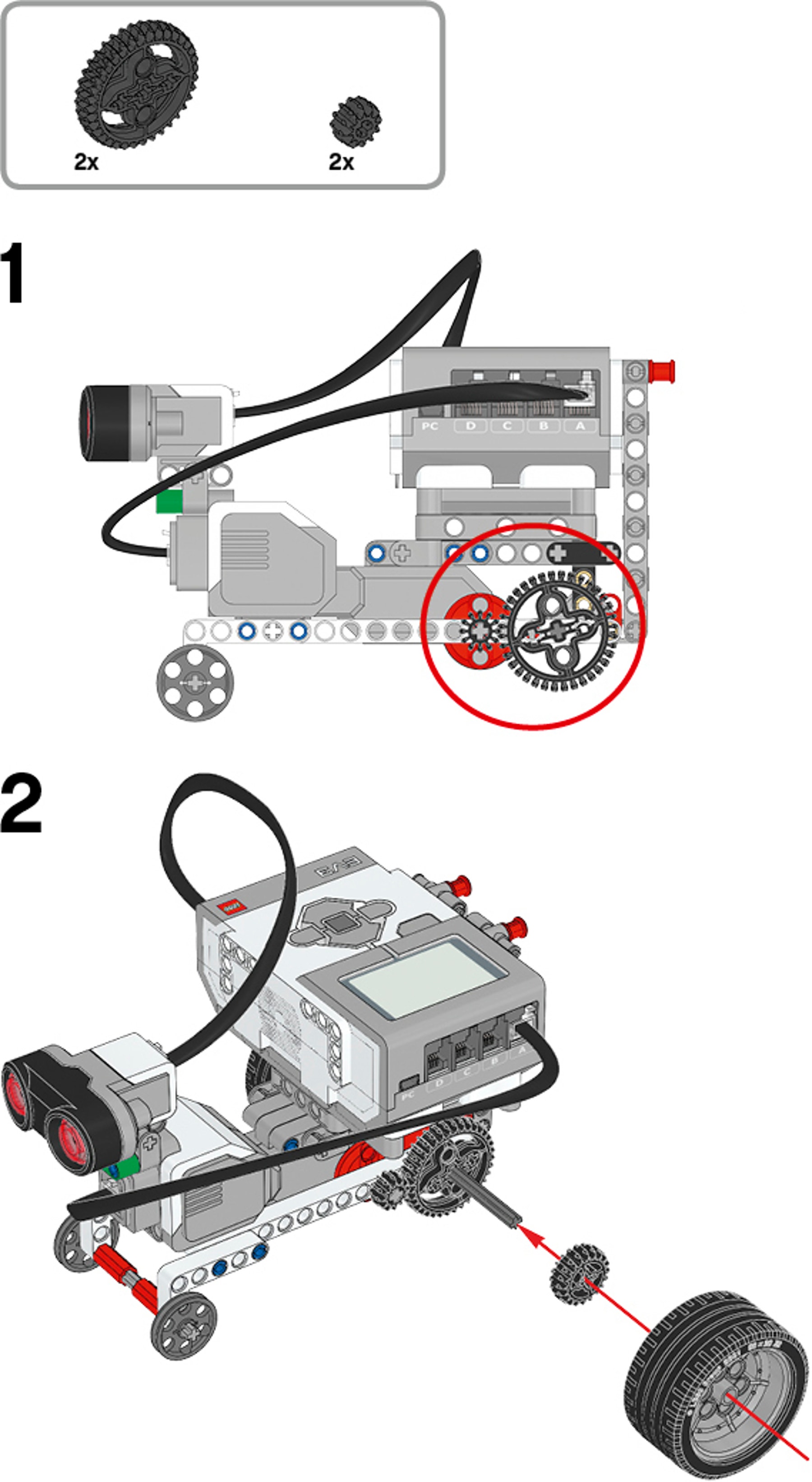
同じギアを使って3番目のギア列を組み立てます:
時間に余裕があれば、標準ギアを使って4番目のギア列を組み立ててください:
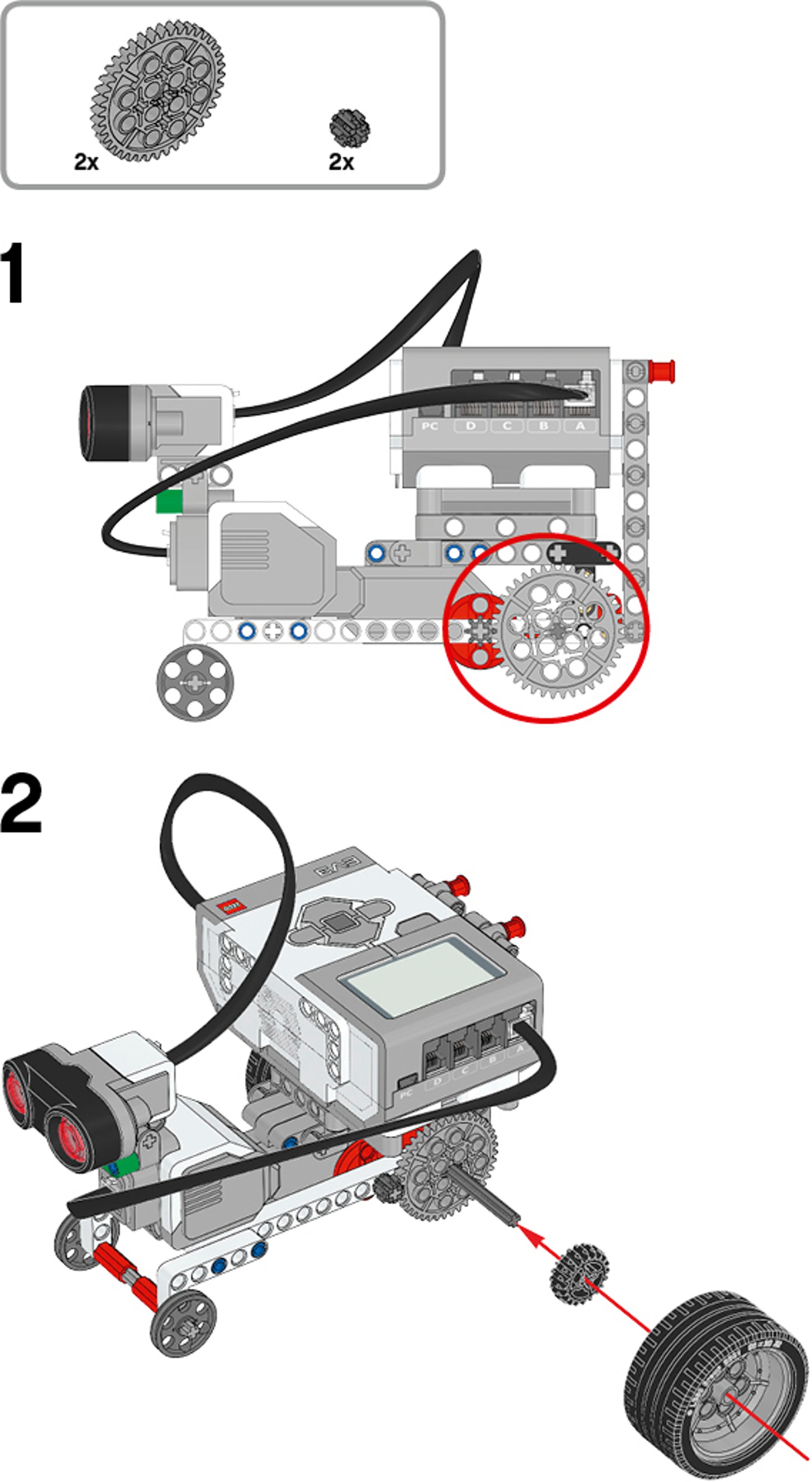
時間に余裕があれば、同じギアを使って5番目のギア列を組み立ててください:

結果をまとめましょう。
ギア列の各バリエーションの実験結果から出した平均値を使って、ギア比が移動距離や速度にどのように関係しているかを分析します。
速度の速い自動車を設計するとしたら、どのギア比を使いますか?重量物を運ぶ自動車を設計する場合はどうですか?
どうでしたか?
うまくできたのはどれですか?もっとうまくできたかもしれないことはありますか?
これで、ギアチェンジが必要な状況がわかりましたね。それでは次のレッスンに全速力で進みましょう!