物体と障害物
ドライビングベースはモジュラープラットフォームです。
必要に応じて拡張したり再構成したりすることができます。センサーを追加すると環境に反応することが可能になり、障害物の検出や衝突の回避などの機能をもたせることができます。
物体を検出できるロボットにはどのようなものがありますか?
直方体ブロックとこの拡張パーツを組み立てましょう。
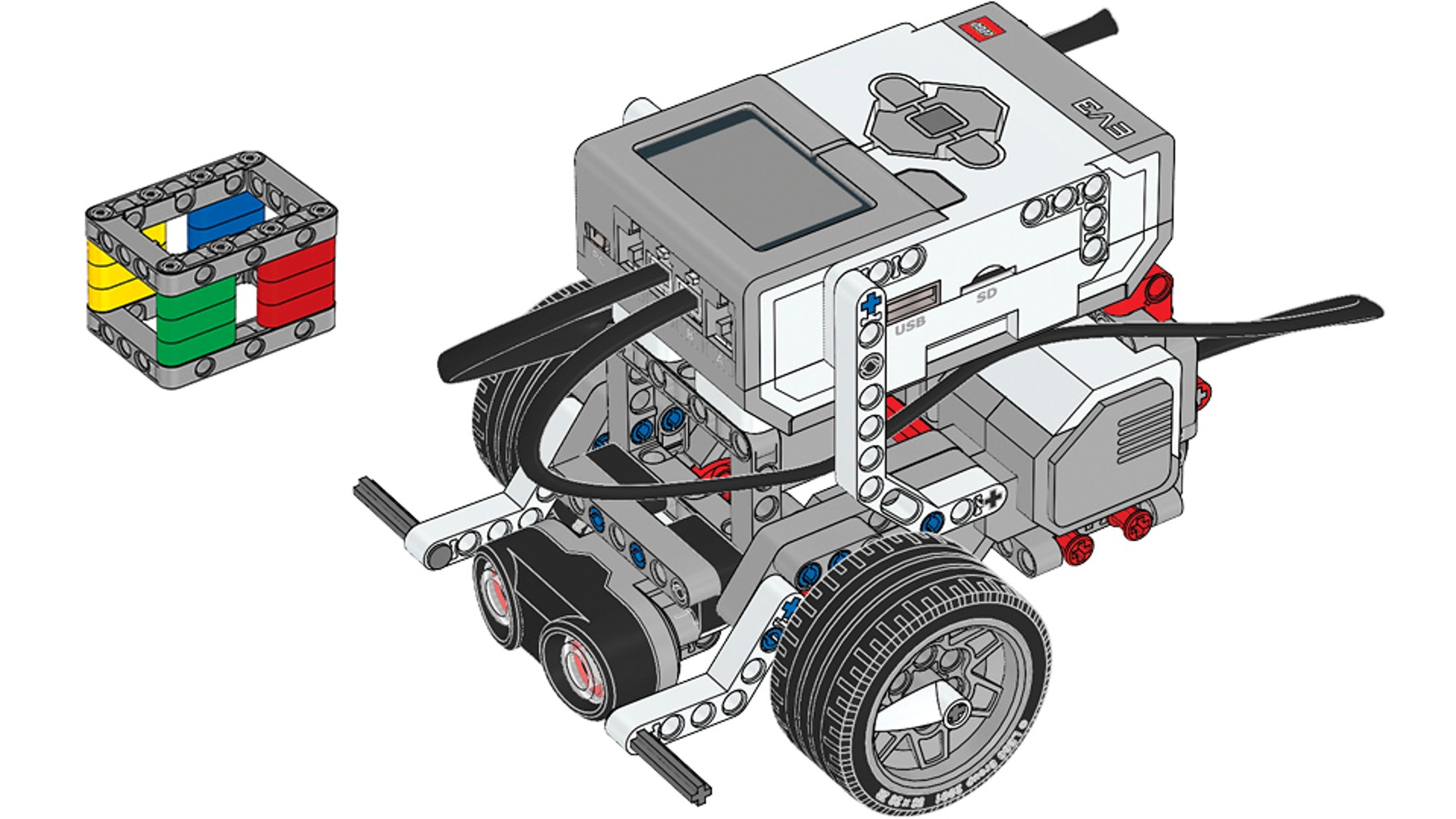
物体や障害物を検出するには、超音波センサー拡張パーツが必要です。まず直方体ブロックを組み立て、次にドライビングベースに搭載する拡張パーツを組み立てましょう。
下のプログラミングスタックを全部試してみましょう。

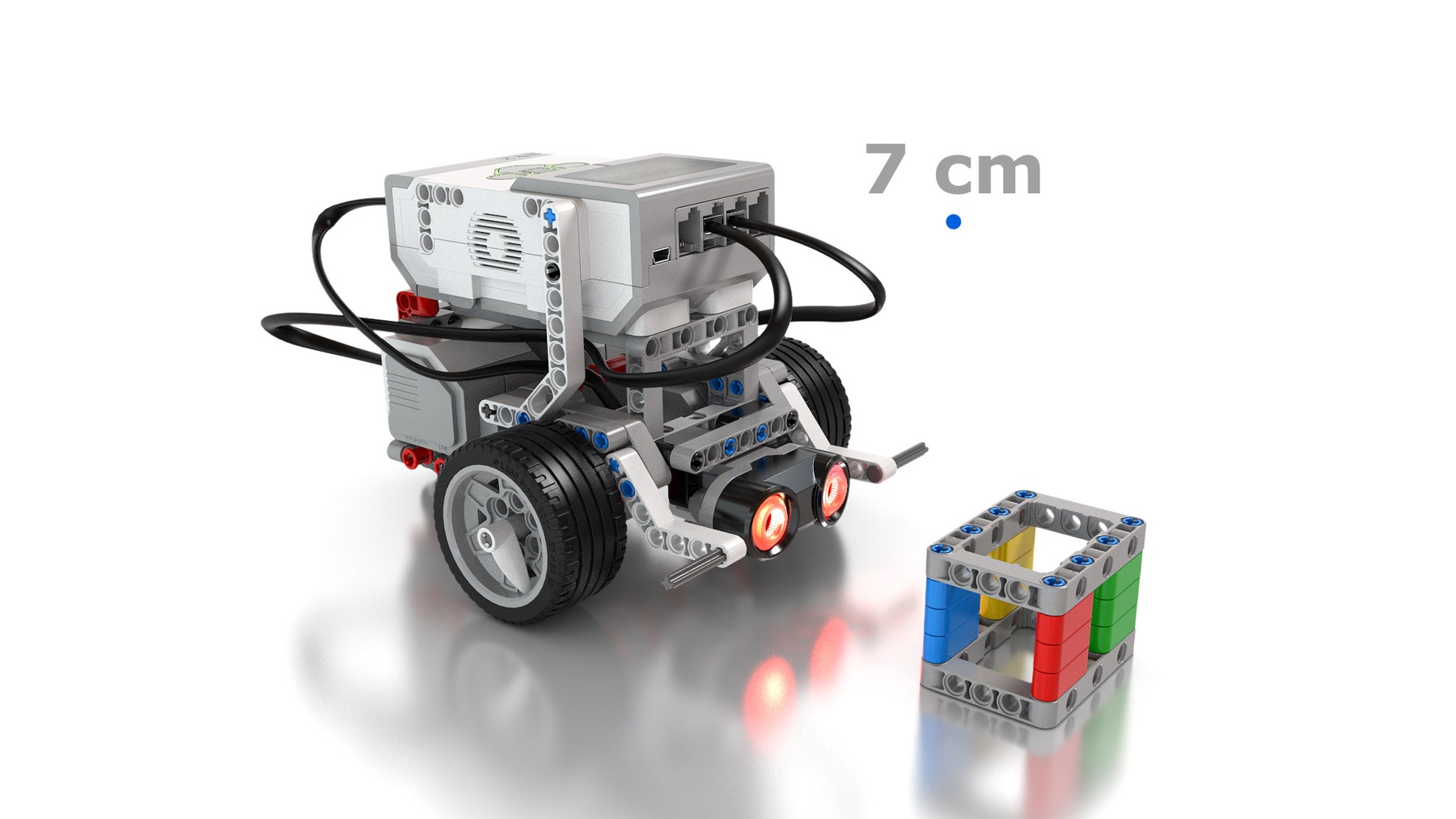
何が起こりましたか?直方体ブロックをほかの位置に置いてみましょう。
超音波センサーを使って距離を測定する機能はどのような状況で使えますか?
キミの番だよ!

プログラミングキャンバスに用意されているプログラミングスタックのブロックを使って、直方体ブロックまでの2種類の距離に反応できるプログラムを作りましょう。
早速チャレンジです!
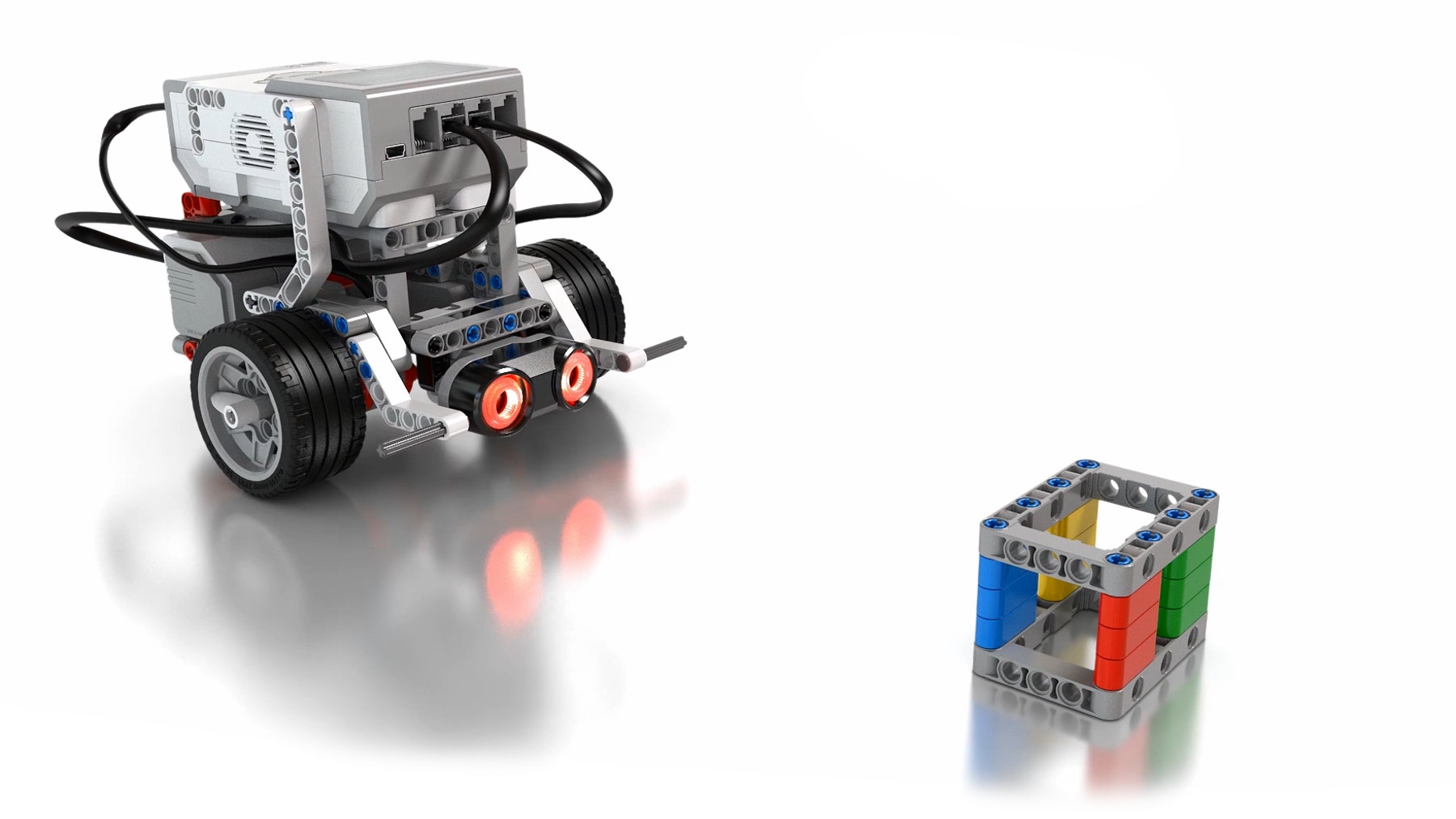
直方体ブロックに近づくにつれて、ビープ音が速くなるか大きくなるようにプログラミングしてみましょう。
どうでしたか?
うまくできたのはどれですか?もっとうまくできたかもしれないことはありますか?
工場は安全が何より重要です!これで、通路にある障害物を検出して適切な反応をさせることができるようになりました。