つかんで放す
このタスクには電動ツールが必要です。
電動ツールをロボットに取り付けると、色々なタスクを実行させることが可能になります。このタスクに適したツールを探しましょう!
物体を移動するためには、ドライビングベースにどのような電動ツールが必要ですか?
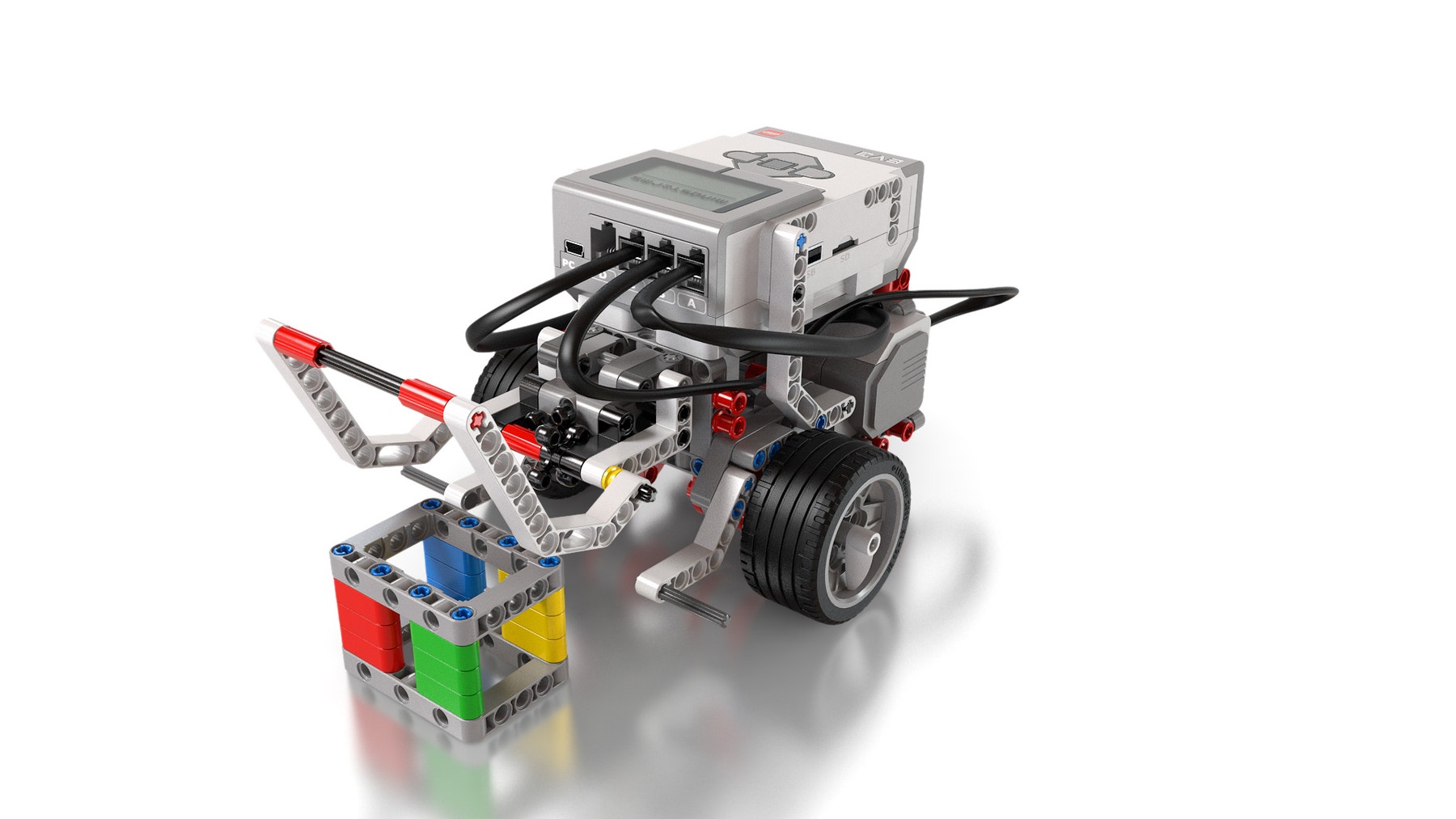
直方体ブロックとこの拡張パーツを組み立てましょう。
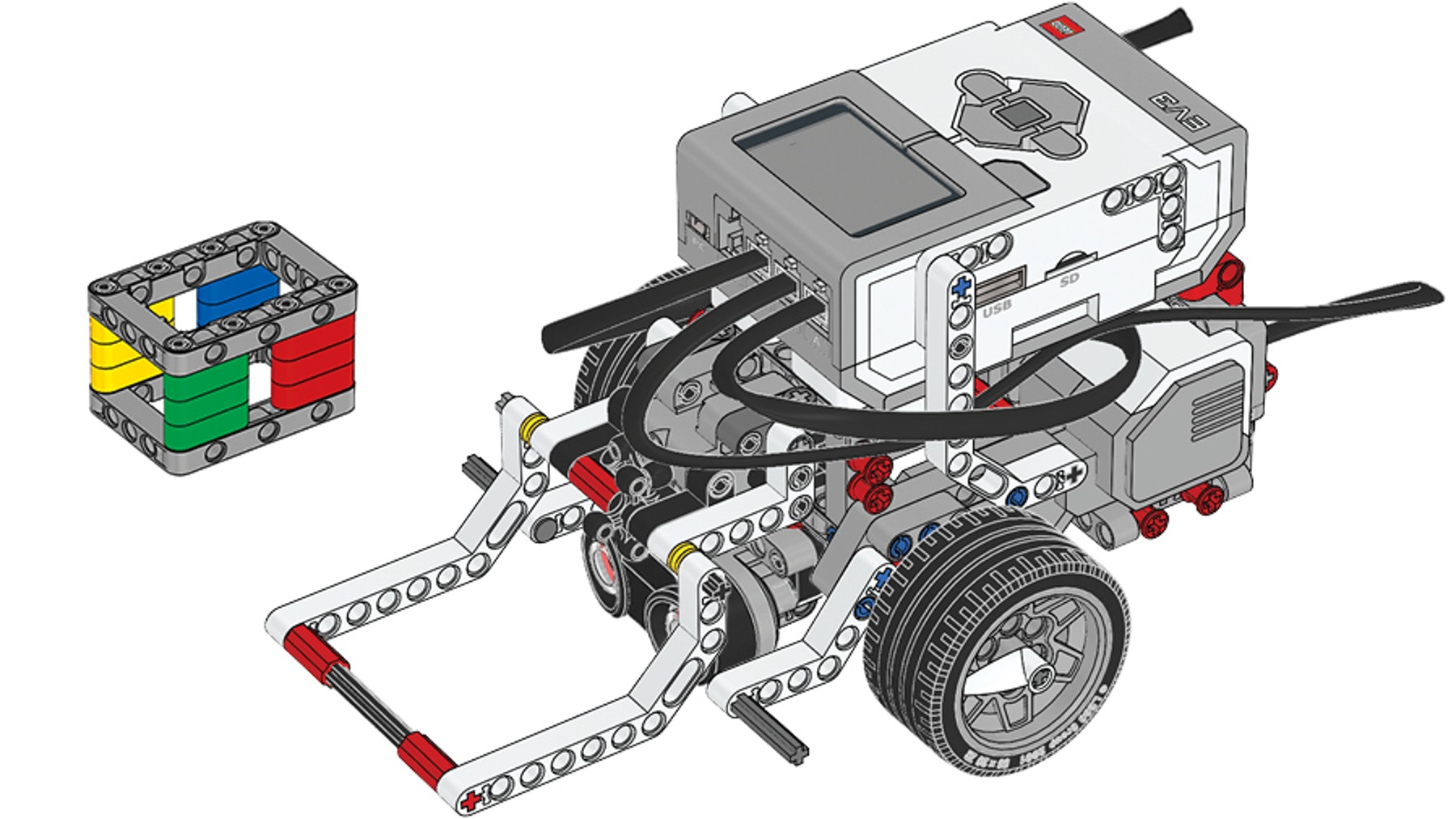
直方体ブロックをつかんで放すにはM モーターを使います。また、前回のレッスンで使用した超音波センサーも必要です。まず直方体ブロックを組み立て、次にドライビングベースに搭載する拡張パーツを組み立てましょう。
下のプログラミングスタックを全部試してみましょう。

何が起こりましたか?直方体ブロックをほかの位置に置いてみましょう。
M モーター拡張パーツの主な特徴と弱点にはどのようなものがありますか?
キミの番だよ!
プログラミングキャンバスに用意されているプログラミングスタックのブロックを使って、直方体ブロックをつかんで特定の回転数だけ前進し、直方体ブロックを放し、後退してスターティングポジションに戻るプログラムを作りましょう。
早速チャレンジです!

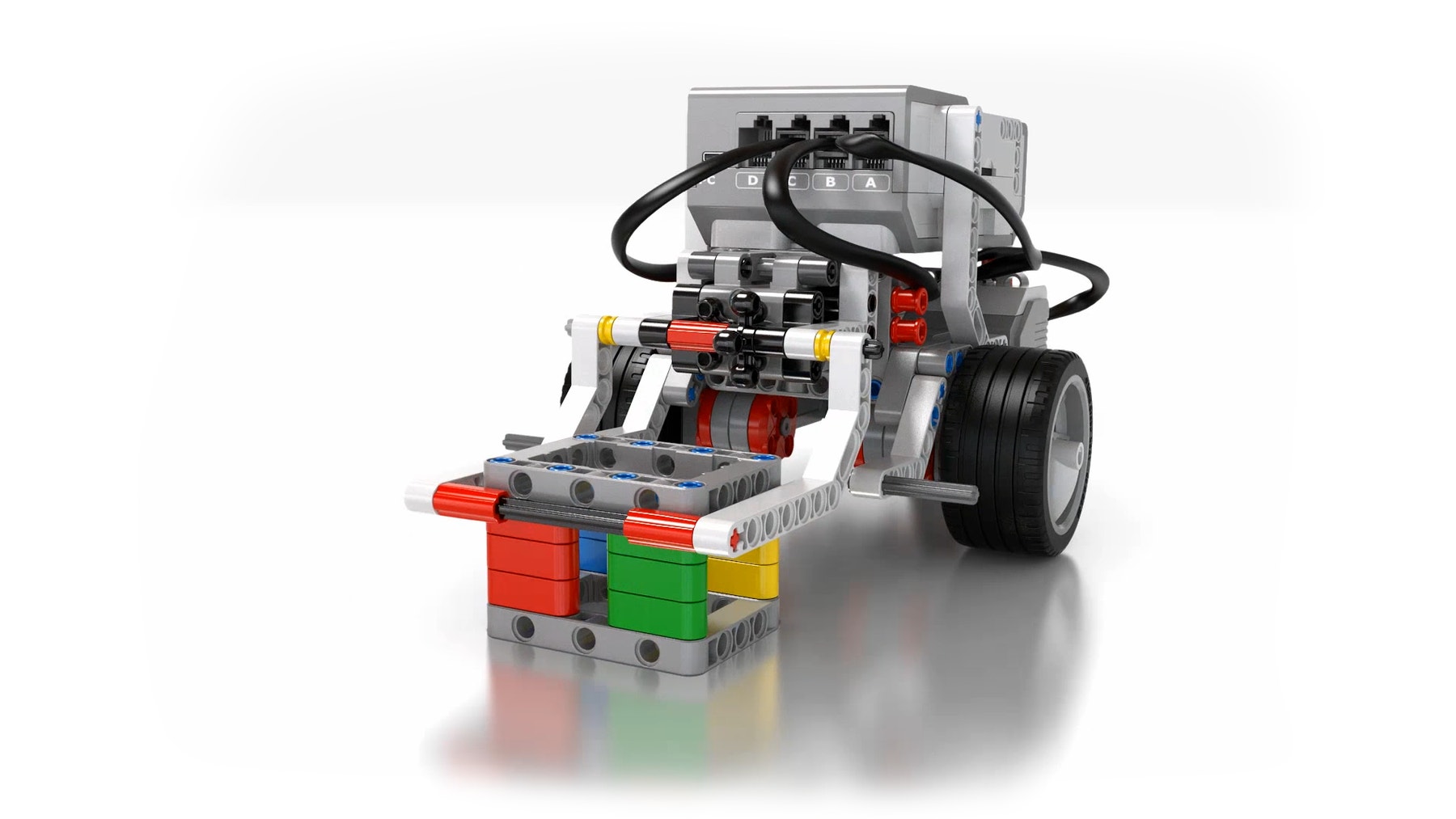
超音波センサーを使って直方体ブロックの近くで停止し、アームを下げて直方体ブロックを回収し、スターティングポジションに戻すことができるよう、ドライビングベースをプログラムできるか挑戦してみましょう。
どうでしたか?

うまくできたのはどれですか?もっとうまくできたかもしれないことはありますか?
よくできました!つかんで放す動作で、物体をどこでも好きな場所に移動することができるようになりました。