色と線
色付きの線で進路を指示しましょう。

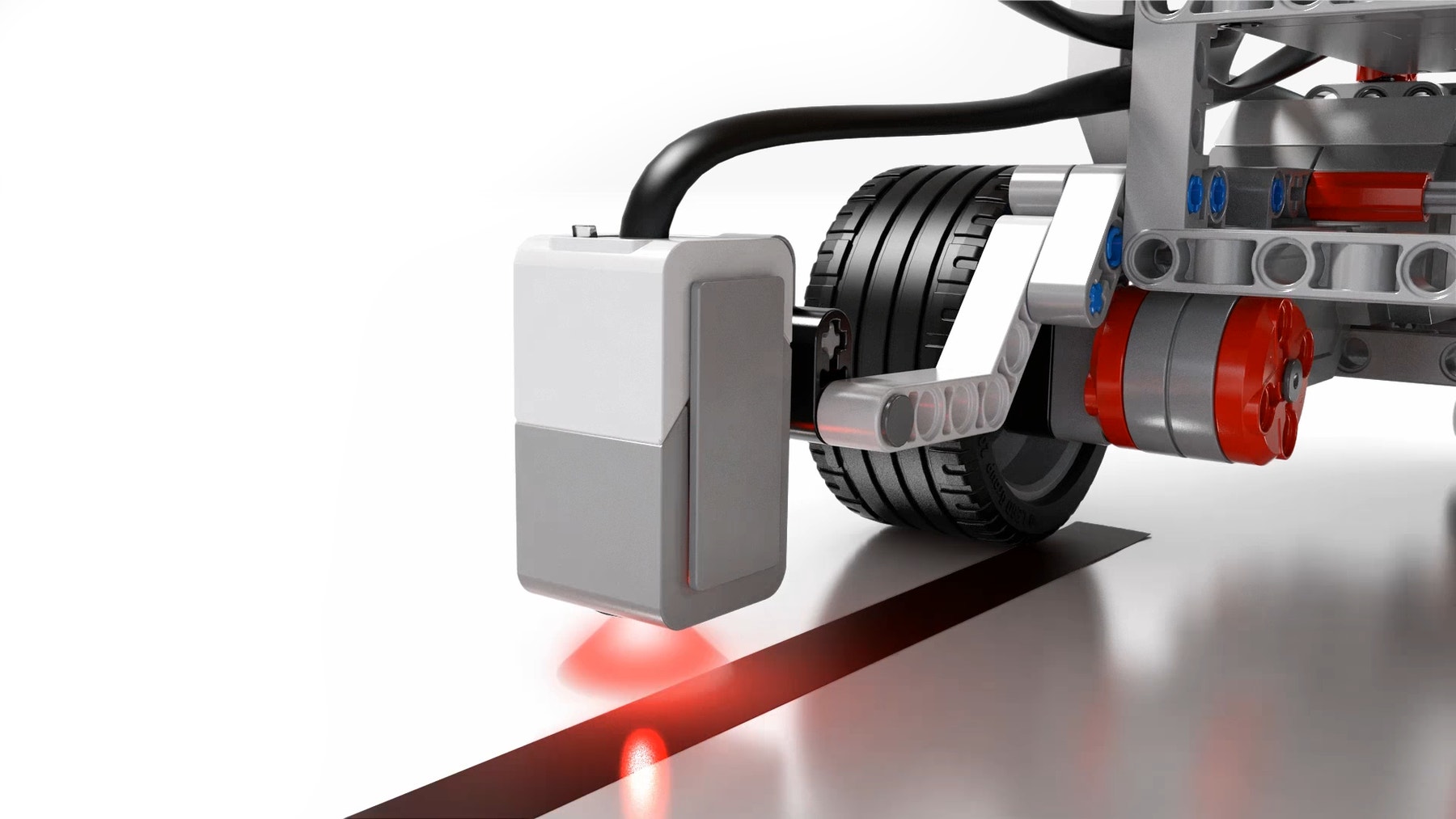
工場の床に、複数の作業ステーションをつなぐ線を描きます。この方法が上手くいけばドライビングベースのすべての動作をハードコードする必要がなくなり、大幅な時間の節約になります。
床に線を描いてロボットの進路を指示する方法の利点と弱点は何ですか?
この拡張パーツを組み立てましょう。
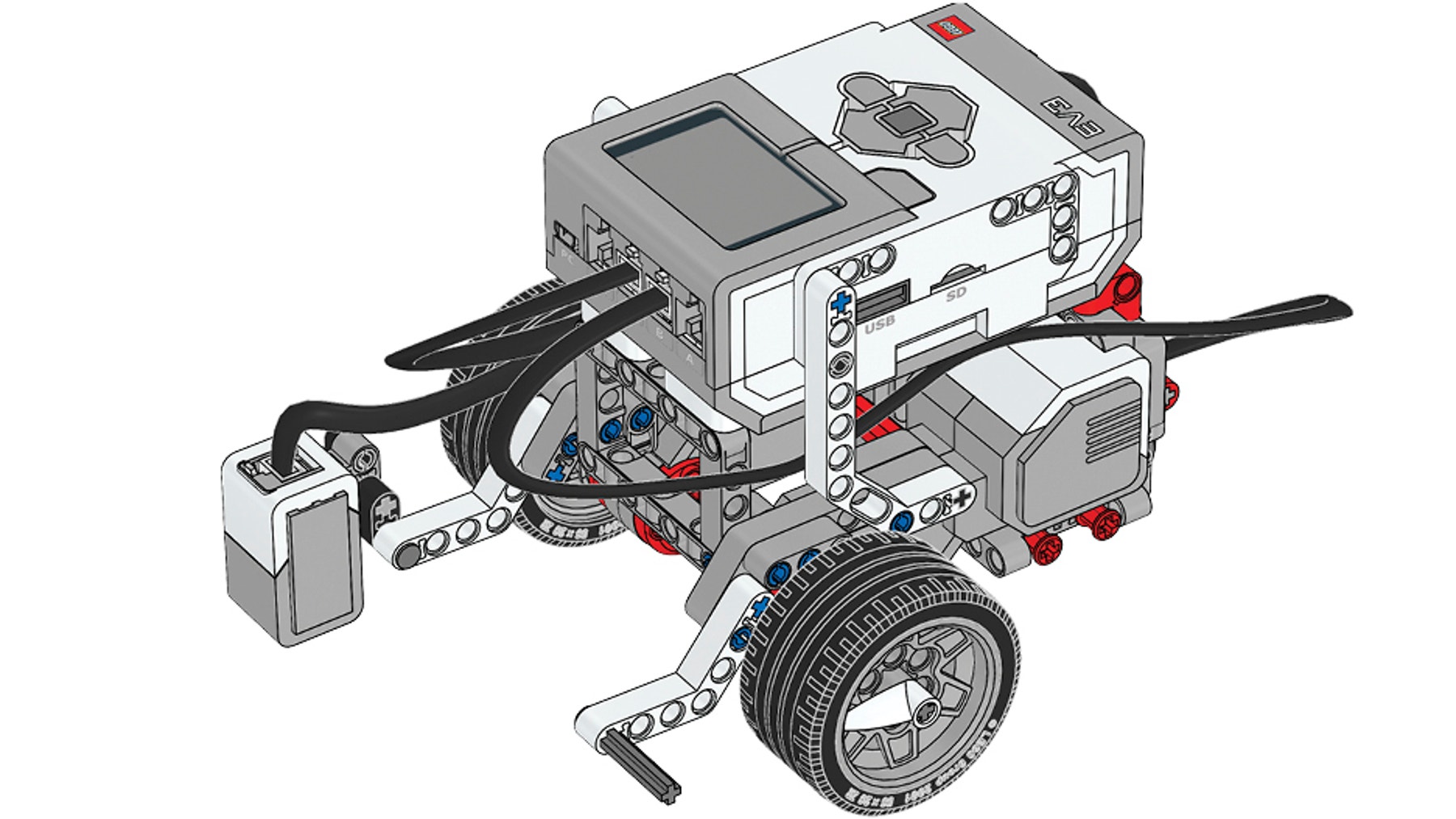
線を検出し、それに沿って走行するにはカラーセンサー下向き拡張パーツが必要です。ドライビングベースに取り付けます。
最初の2つのプログラミングスタックを試しましょう。

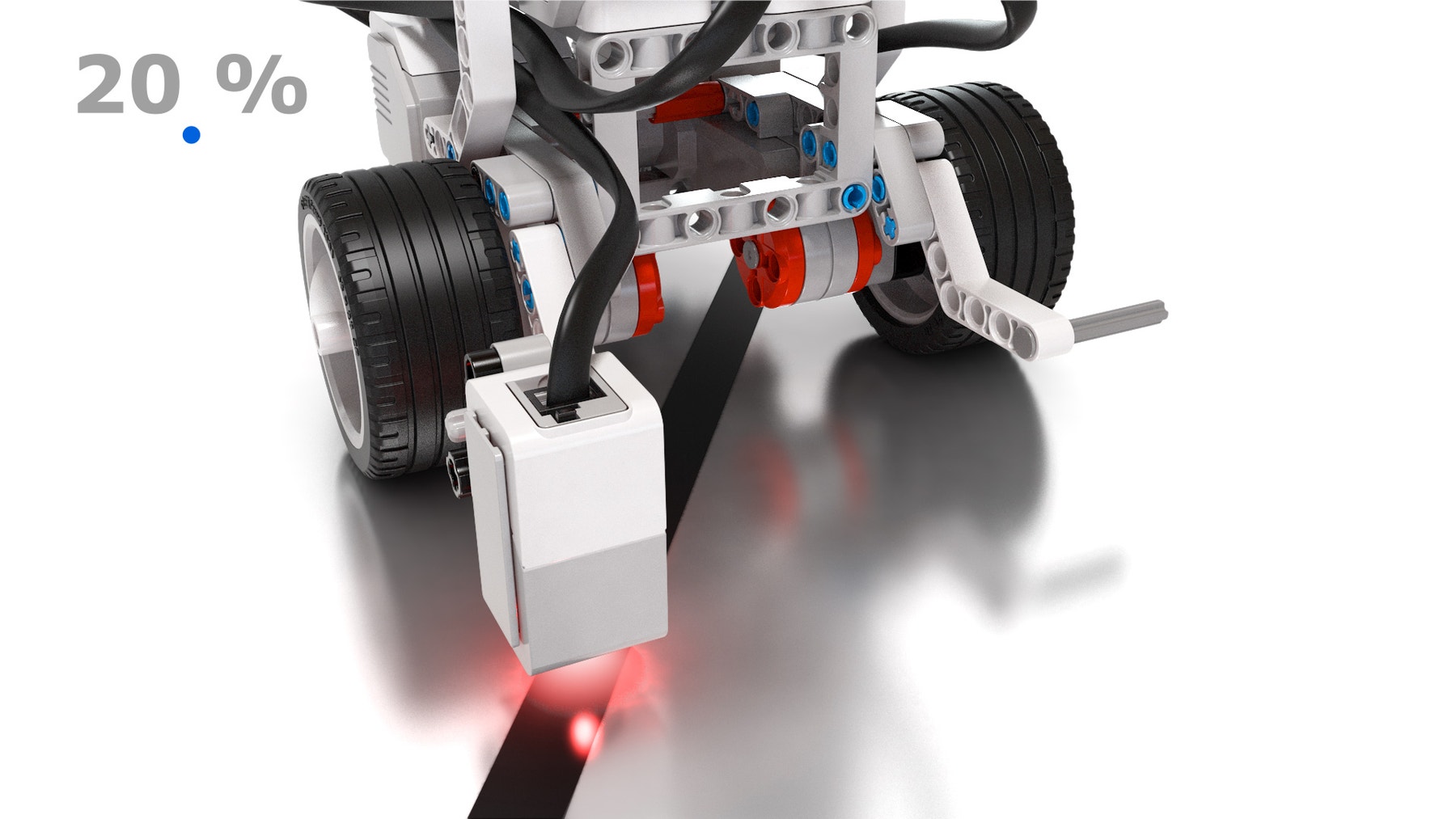
ロボットを線の近くに置いてください。何が起こりましたか?
カラーセンサーを調整しましょう。
まずカラーセンサーを調整するプログラミングスタックを実行し、ライントレースプログラムを再度実行します。
カラーセンサーの調整が重要なのはなぜですか?
早速チャレンジです!

ドライビングベースがより速く、スムーズに線に沿って走行できるようにプログラミングしてみましょう。
どうでしたか?

うまくできたのはどれですか?もっとうまくできたかもしれないことはありますか?
素晴らしい!これで、線を検出して、それに沿って走行することが可能になりました。