角度とパターン
ドライビングベースはモーターエンコーダを使って回転動作を行います。

この構造に問題はありませんが、工場の床を清掃する度にドライビングベースの車輪が滑り、迷ってしまうことがあります。ジャイロセンサーを使うとドライビングベースが自分の向きを把握することができ、正しい進路で走行できます。
ロボットが方向の変化を検出して進路を決定する機能は、どのような状況で役立ちますか?
この拡張パーツを組み立てましょう。
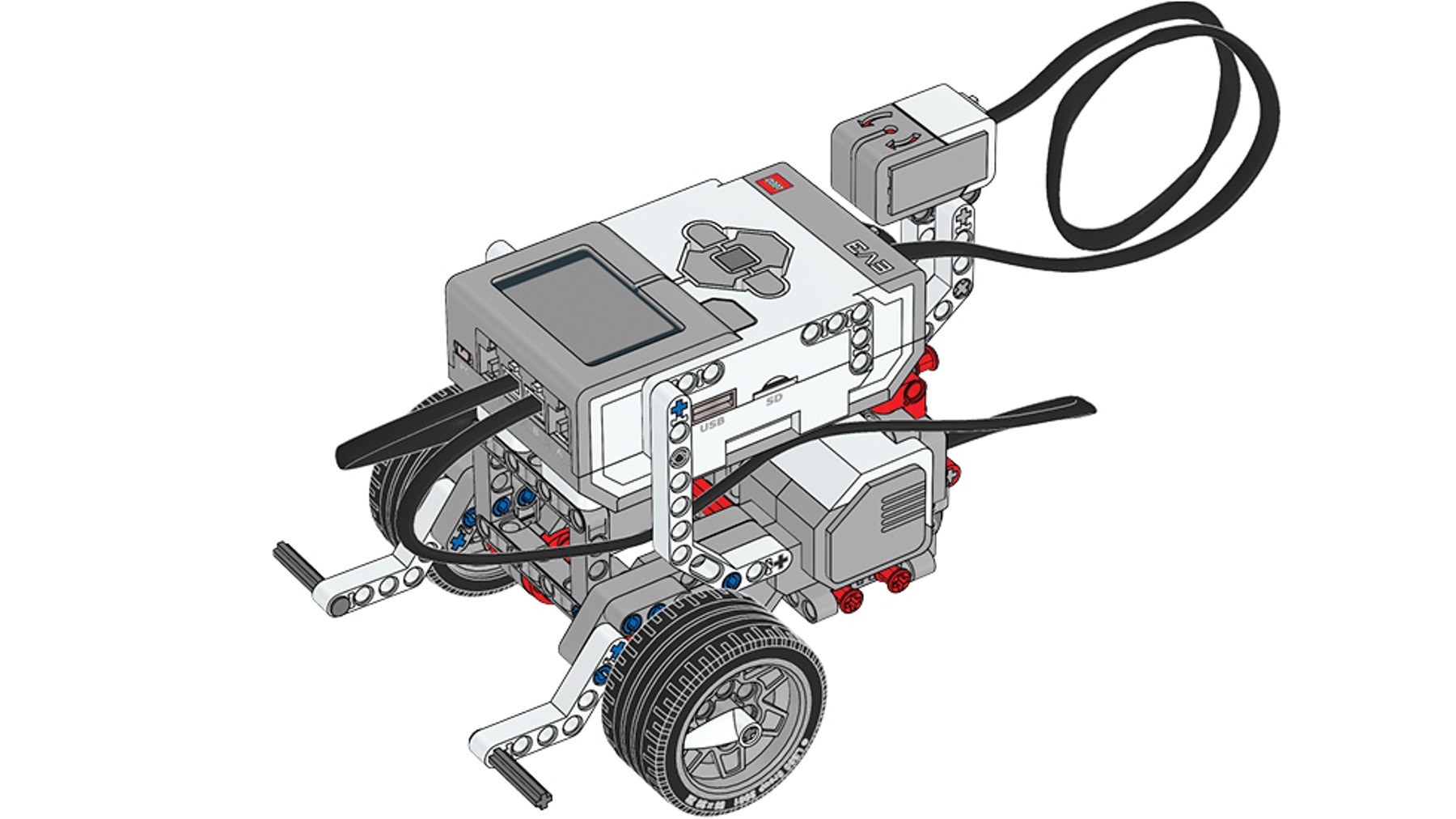
ジャイロセンサー拡張パーツを使うと、詳細に計画された進路を正確に走行することができます。ドライビングベースに取り付けます。
下のプログラミングスタックを全部試してみましょう。


何が起こりましたか?
どうすればマイブロックを使ってプログラミングブロックを整理し、再利用することができますか?
キミの番だよ!

プログラミングキャンバスに用意されているプログラミングスタックのブロックを使って、ドライビングベースが90°回転し、前進し、最後に指定されたパターンを描きながら走行するプログラムを作りましょう。
早速チャレンジです!

ジャイロセンサーとマイブロックを使って、ドライビングベースが正方形を3回描き、次に三角形を1回描くようプログラムできるか挑戦してみましょう。
どうでしたか?
うまくできたのはどれですか?もっとうまくできたかもしれないことはありますか?
よくできました!プログラムがすっきりしましたね!