工場で働くロボット
レゴ^®^ 工場では自律走行ロボットが複数のタスクをこなしています。


そのうちの1つは、作業ステーション間の箱の移動です。バッテリー残量が低くなると自分で充電ステーションまで移動することもできます!壁や従業員、ほかのロボットに衝突することなく、タスクを効率的にこなしています。
ドライビングベースでレゴ工場のロボットと同じようなタスクを実行できると思いますか?
チャレンジはこちらです!
以下のタスクを実行できる拡張パーツを設計し、ドライビングベースに搭載しましょう:
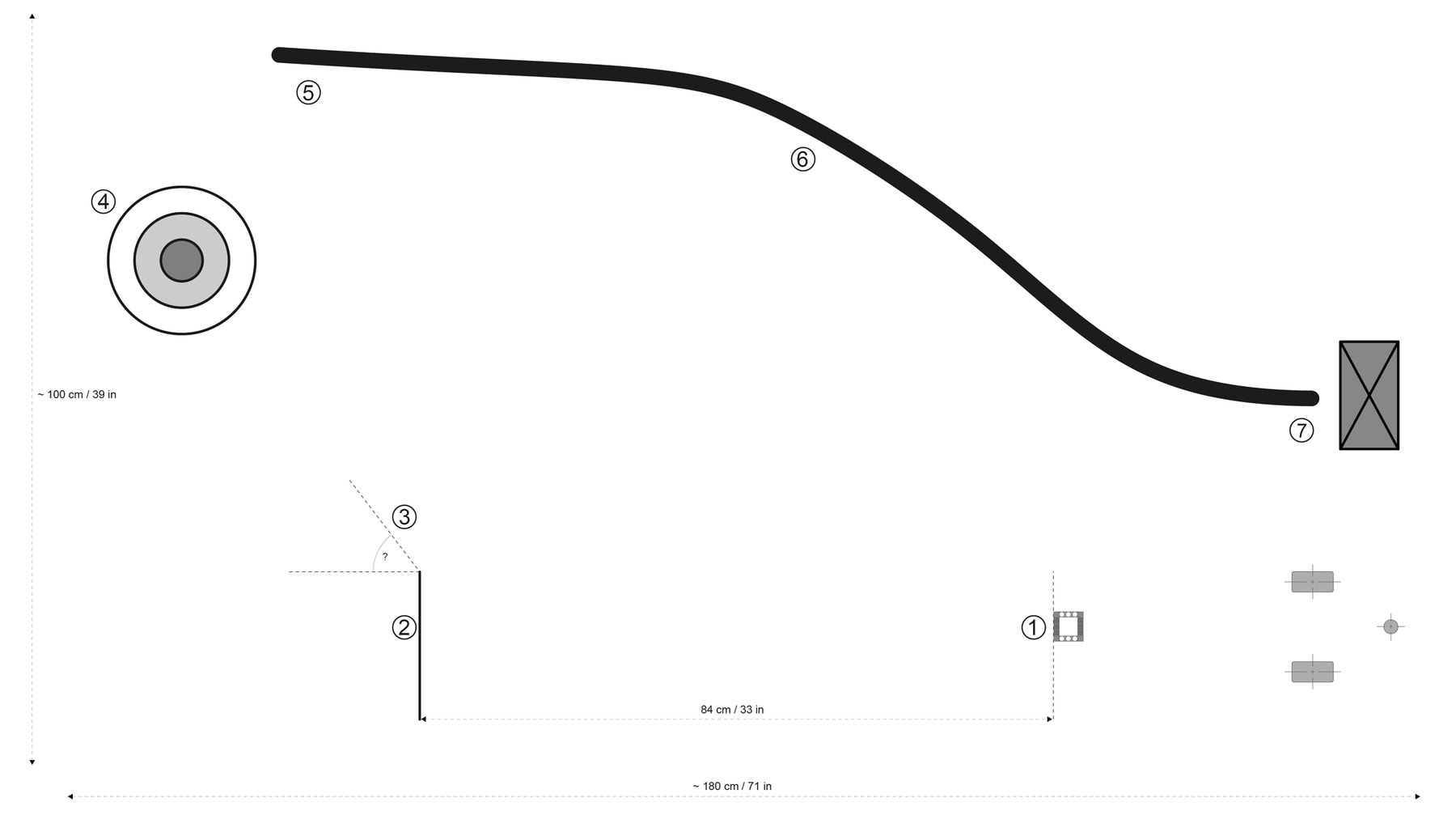
- 直方体ブロックをつかんで積み降ろしゾーンまで運び、中央にできる限り近い位置で放す。
- 線を検出して、それに沿って充電ステーションまで走行し、大きな物体に接触することなく、できる限り近い位置で停止する。
荷物を積み降ろしゾーンまで運びましょう。

ブレインストーミングでアイデアを出し合い、ロボットを完成させましょう。準備ができたら、直方体ブロックをつかんで積み降ろしゾーンの中央まで運ぶことができるかどうかテストです。
ブレインストーミングのヒント
課題を以下のように小さな問題に分解してブレインストーミングすることもできます:
- どうすればロボットは直方体ブロックをつかむことができるでしょうか?
- どうすればロボットに積み降ろしゾーンの中央まで移動させることができますか?
- これまでのレッスンに出てきた拡張パーツのうち、このタスクに役立つのはどれでしょうか?
線に沿って充電ステーションまで走行しましょう。
ブレインストーミングでアイデアを出し合い、ロボットを完成させましょう。準備ができたら、線に沿って充電ステーションまで走行し、大きな障害物の前で停止することができるかどうかテストです。
ブレインストーミングのヒント
課題を以下のように小さな問題に分解してブレインストーミングすることもできます:
- どうすればロボットは線を検出し、それに沿って走行することができるでしょうか?
- 線に沿った走行をしているロボットが、大きな物体にできる限り近い位置で停止するにはどうすればよいでしょうか?
- これまでのレッスンに出てきた拡張パーツのうち、このタスクに役立つのはどれでしょうか?
チャレンジに挑戦しましょう。

ロボットをスターティングポジションに置き、以下のタスクをこなせるか試してみましょう:
- 直方体ブロックをつかんで積み降ろしゾーンの中央まで運ぶ。
- 線に沿って充電ステーションまで走行する。
どうでしたか?

うまくできたのはどれですか?もっとうまくできたかもしれないことはありますか?
よくできました!これでドライビングベースをマスターできました。工場で実際に使うことができます!