車線逸脱警報システム
CONNECT(結びつける)
次の質問にすべて答えられるようにしましょう: - 自動運転車は信号の色に反応することができますか? - 運転中に運転手が眠ってしまった場合はどうなりますか? - どうすれば運転手が眠ってしまったことを検出できますか?これまでに学んだことについて考え、記録しましょう。自分の言葉で問題を説明します。自分のアイデアや発見したことをいろいろな方法で記録しましょう。

Construct(組み立てる)
組み立て まずはこのモデルを組み立てます。プログラム 自動運転車は信号を認識し、その色に応じて異なる反応をする機能が必要です。赤い信号でロボットを停止させるプログラムを作りましょう。プログラムを改善して、ロボットが信号から適切な距離離れた位置で止まるようにしましょう。ロボットが赤以外の色に反応しないようにしてください。ここまで成功したら、今度は信号が赤から緑に変わるとロボットがまた前進するようプログラムします。
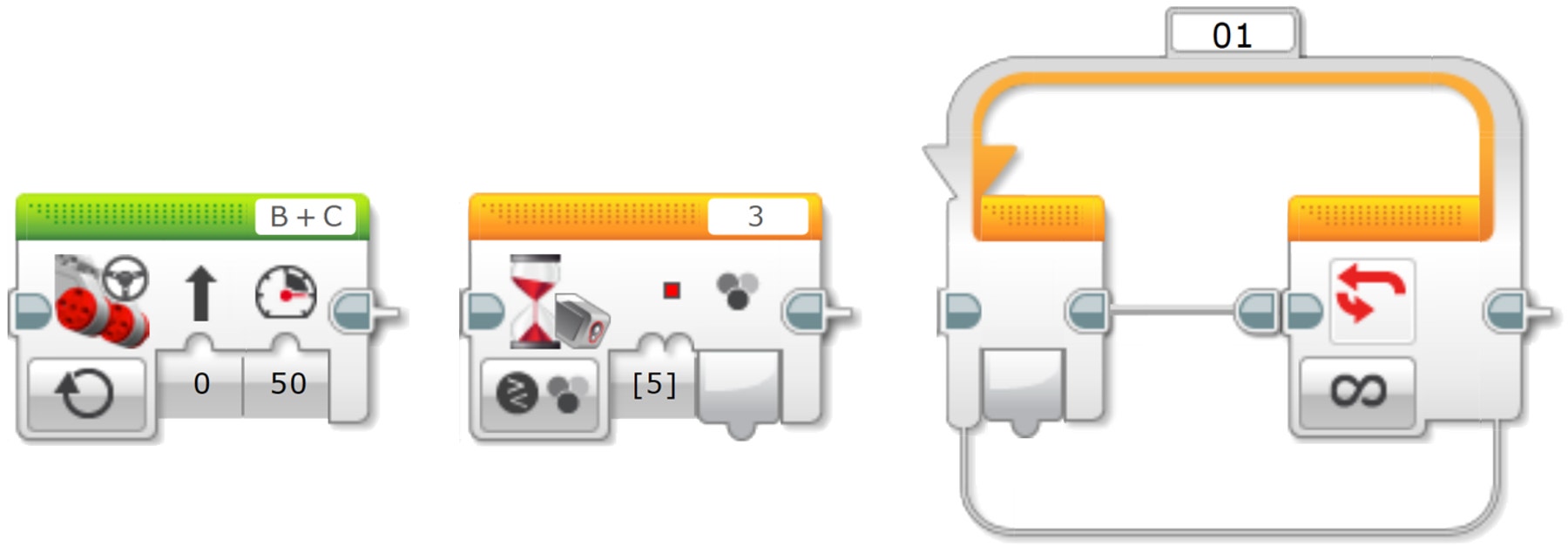
カラーセンサーとスイッチブロックを使ってロボットに動作を判断させましょう(ブール論理)。この2つのブロックを使用することで、ロボットは検出される色に応じて動作を選択できるようになります。これまでに学んだことについて考え、記録しましょう。このタスクの擬似コードについて説明してください。自分のアイデアや発見したことをいろいろな方法で記録しましょう。下のブロックをプログラムに使う方法を考えてください:
CONTEMPLATE(よく考える)
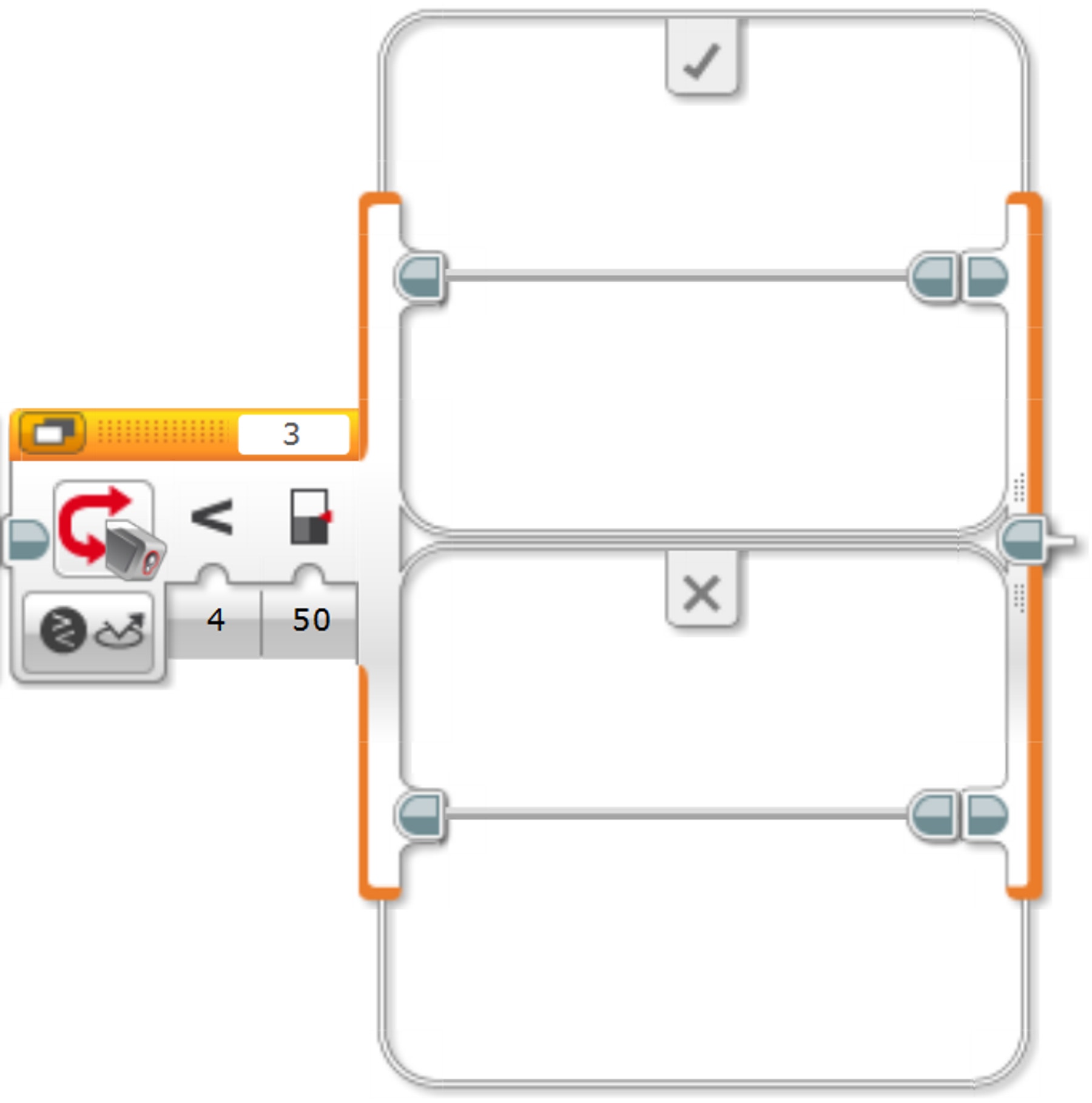
運転中に運転手が眠ってしまった場合に起こることを再現するために、ロボットが線を超えるとアラームが鳴る機能を作ってみましょう。この機能は、多くの最新車に搭載されています。ロボットがこの機能を実行できるようプログラムしてください。これまでに学んだことについて考え、記録しましょう。このタスクの擬似コードについて説明してください。自分のアイデアや発見したことをいろいろな方法で記録しましょう。
発展オプション ロボットが特定のルートを「自動操縦」で走行するようにプログラムしましょう。暗い線(または白い線)を認識してそれに反応するプログラムが必要です。ロボットが線から離れることなく線に沿って移動するプログラムを作成してください。ロボットが線に沿ってできる限りスムーズに走行するよう、継続的にデバッグをしてください。発表する 下のような質問をしてみてください:どこが難しかったですか?何か驚いたことはありましたか?どうすればプログラムを改善できますか?プログラムをもっと合理化することはできますか?もっと少ないブロックで同じものが作れますか?もっと効率的にプログラムを作る方法はありませんか?実生活でこのプログラムをどのように使うことができますか?これまでに学んだことについて考え、記録しましょう。自分のアイデアや発見したことをいろいろな方法で記録し、発表しましょう。下のブロックをプログラムに使う方法を考えてください:
Continue(さらに続ける)
このアクティビティの課題に使えるテキストベースのプログラミング言語について調べ、異なるプログラミング言語を用いた解答例を比較しましょう。