ほとんどの競技には、やり取りできるモノがあります。

例えば、リレーレースの走者は速く正確にバトンを渡す必要があります。
他に何か思いつきますか?
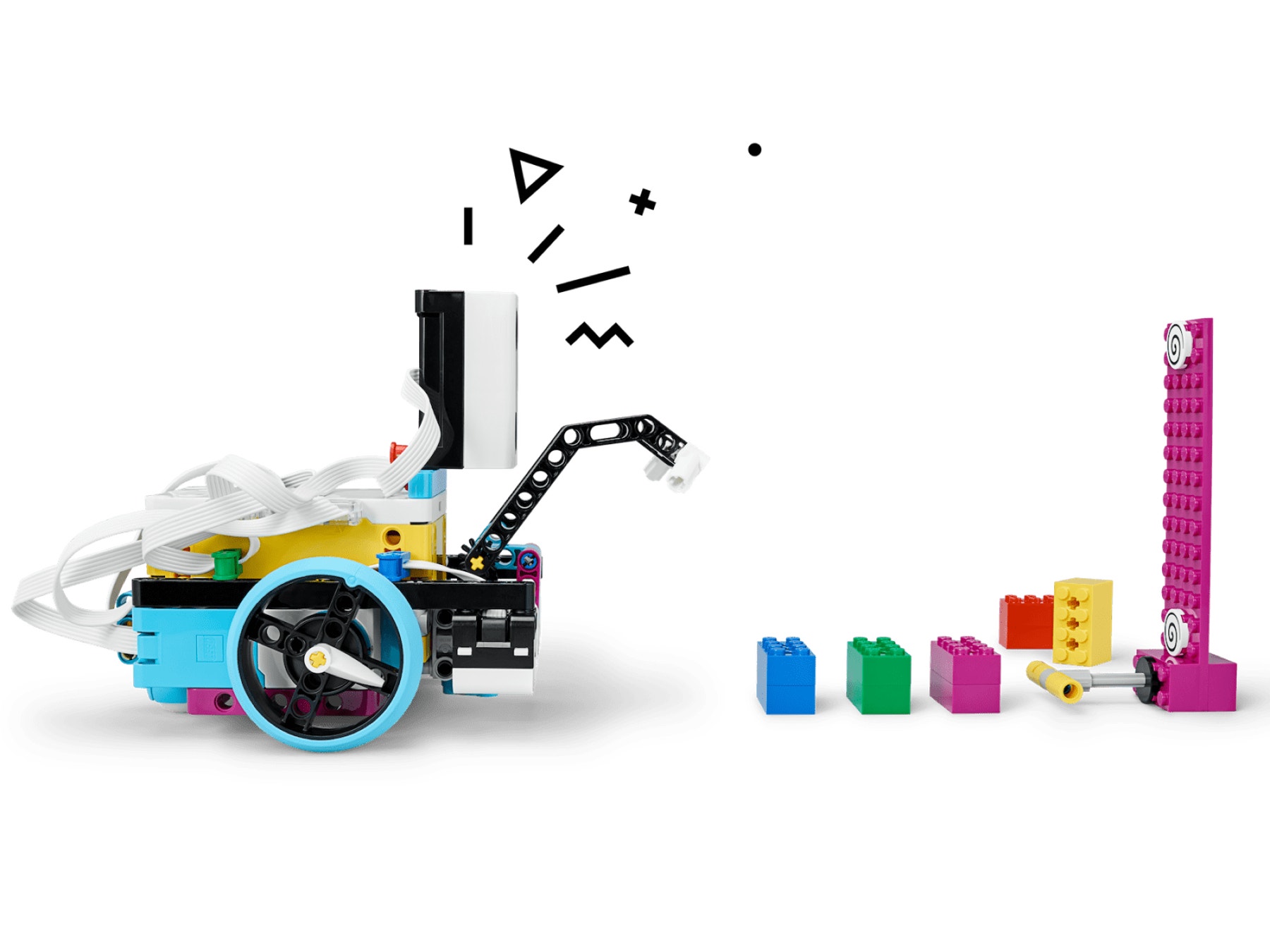
ゲームに使う4つの部品を組み立てましょう。

全て一度に使います。
- 超音波センサーをドライビングベースに追加しましょう
- アーム
- マーカー
- キューブ
物体のある場所で停止する:センサーあり?センサーなし?


ドライビングベースをマーカーから30㎝はなして置きます。
1度に1つ、全部で2つのプログラミングスタックを試して、どちらが良いかを決定します。
1つ目のプログラミングスタックは、きょりセンサーを使ってドライビングベースの前にある物体を検知します。
前進して、キューブをつかみ取ります。
あなたのプログラミングスタックに、さらにプログラミングブロックを追加して、以下のことをやってみましょう。
- マーカーの所で止まり、アームを下げる
- マーカーからキューブをはなすように反対へ動かしましょう。
解決方法の1つはこちらです。

リレー競技を見てみよう!
リレー競技のプログラムを作りましょう。
一番になれるでしょうか?
ゲームルールのヒントを確認しましょう。
ルールはこちらです。
1. きょりを30 cmに設定する。
2.キューブを分解して、4本の色付きのリレー用バトンにする。
3.マーカーから色付きのバトンを1度につき1本集めるようなプログラムを作成する。
4.届けられた時と同じように各バトンをドライビングベースから取り外す。
どうだったか考えましょう。

うまくできたことはどんな方法でしたか?もっとうまくできたかもしれないことはありますか?
すてきですね。