正しい線を見つけましょう!
カーレースに勝つのは簡単です。大体の場合、最も速いこと、そしてレーンから外れないことが大切です。
線に沿って走ることは役立ちますか?
きょりセンサー付きのドライビングベースの組み立て

さっそく始めよう!
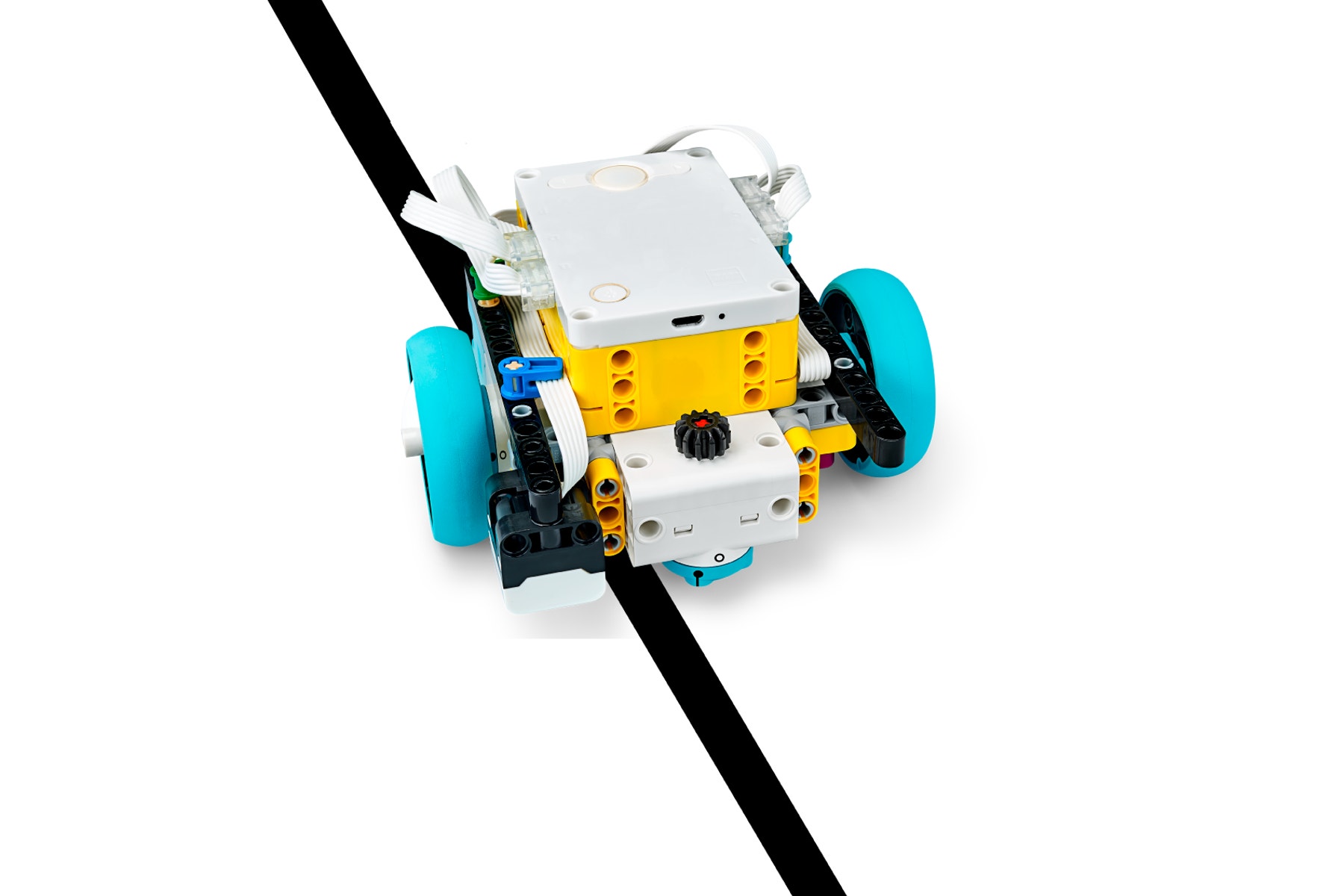
走らせて、線で止まりましょう。

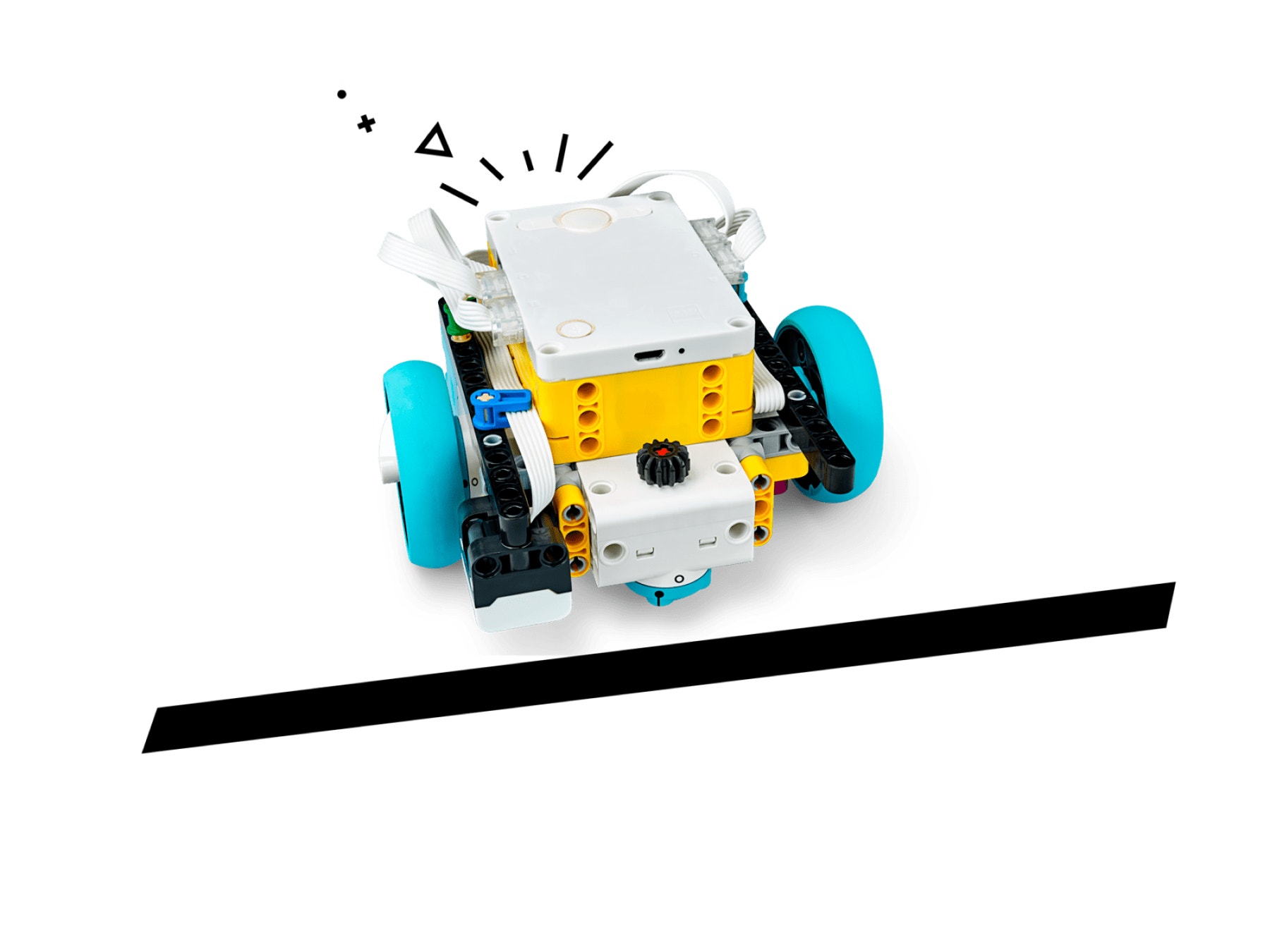
最初のプログラミングスタックを動かして、何がわかったか説明してみましょう。
このプログラミングスタックによって、ドライビングベースは線に対して垂直に止まります。
線に使えるもの
- 紙に描かれた黒い線
- 黒いテープ
- 大きな黒いレゴブロック
線の上を走ります。
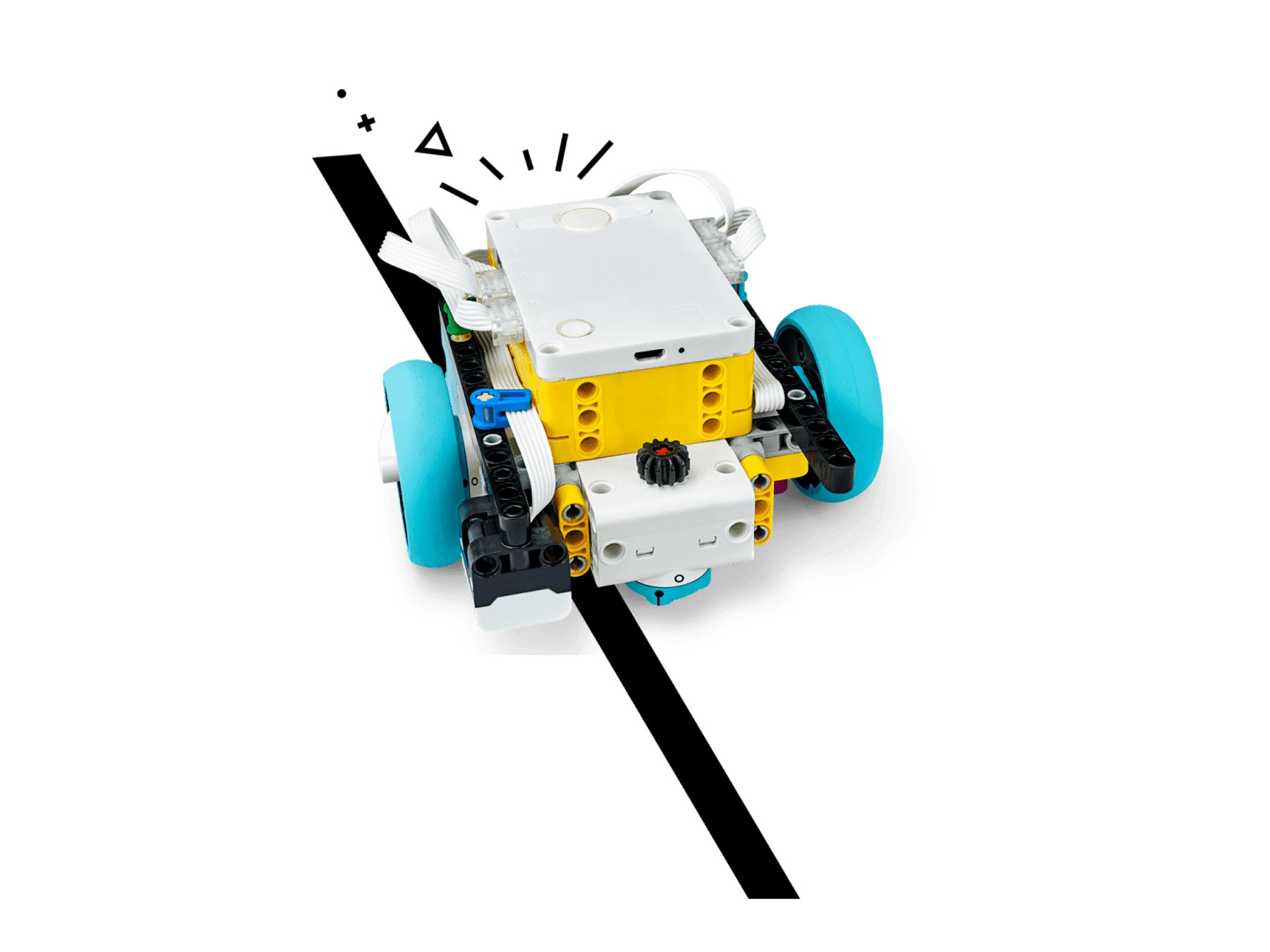
次のプログラミングスタックを動かして、何がわかるのか説明しましょう。
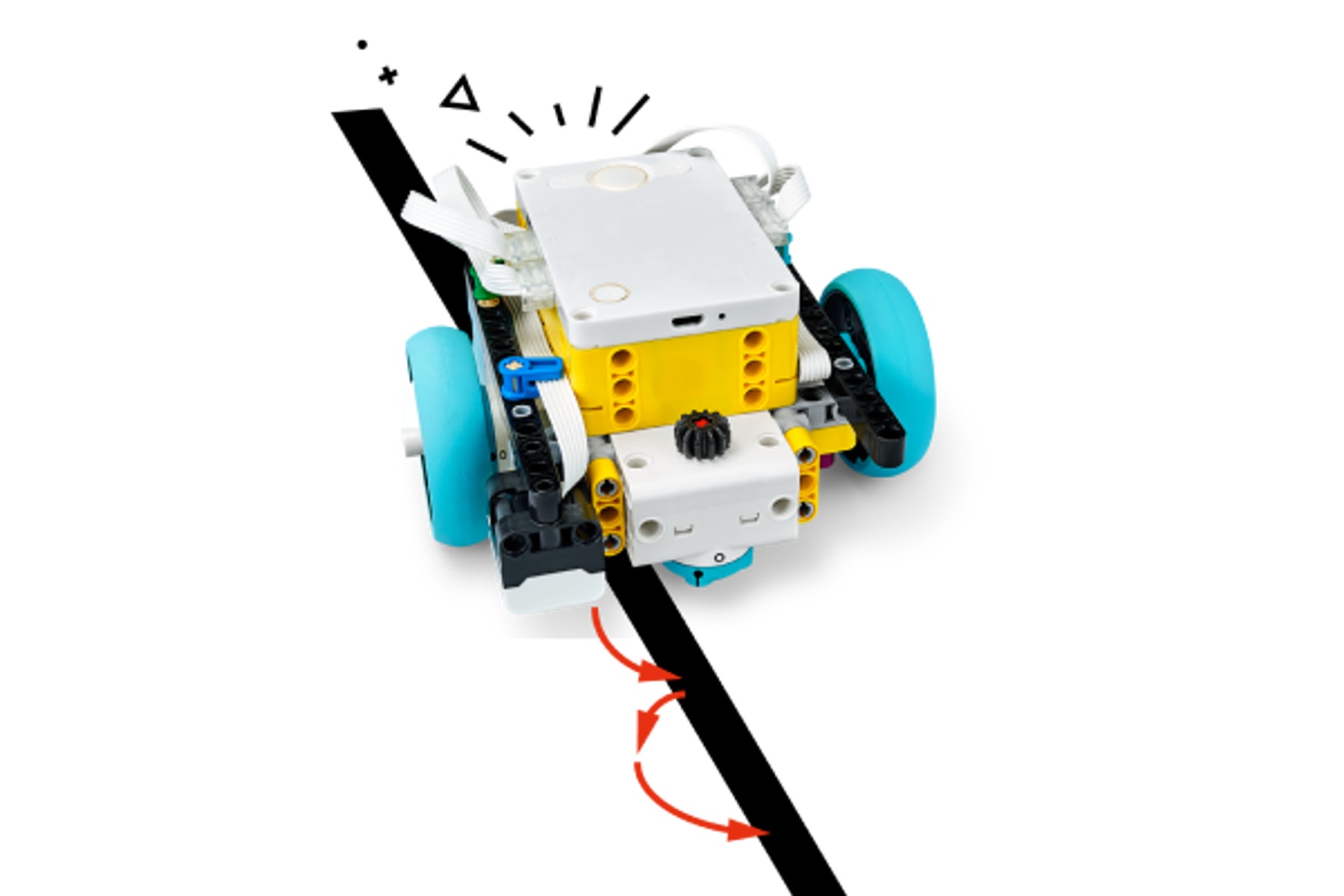
カラーセンサーが黒い線を検出すると、ドライビングベースは白い空間の方に回転します。
カラーセンサーが黒い線を検出しない場合、ドライビングベースは黒い線と反対の方向に回転します。
これらの2つのアクションをずっと繰り返します。
右50、左-50でモーターを操縦していることに気付いた人もいるでしょう。何故だかわかりますか?
線に沿った動きでは、ドライビングベースが前進できるように、一方のモーターを動かし、もう一方のモーターを停止させる必要があります。ドライビングベースが急に回転しすぎると、その場で前後に回転してしまうだけです。
速いライントレーサーを作るためにプログラムを改良しましょう。
速いライントレーサーを作るにはいくつも方法があります。
レースをして、誰のドライビングベースが一番速いか見てみましょう!
「IF ELSE」のブロックを追加して、プログラムを速くくり返すようにしましょう。
ライントレーサーのプログラムを改良し続けると、ライントレーサーの速さにあなたは驚きますよ!
このようなプログラムになります。

どうでしたか?

うまくできたことはどれですか?もっと上手くできたかもしれないことはありますか?
すごい!これでドライビングベースをどんな競技フィールドでも動かすことができるようになりました。