マイロのモーションセンサー
主な目標
このプロジェクトの内容:
• モーションセンサーを使って、マイロの物体検出アームを組
み立てて、プログラミングする。
• マイロが、どのように植物サンプルを見つけたか記録する。

1. 調べる
マックスとミアは、物体を検出することのできるセンサーを、マイロに取り付けたいと思っています。

2. 組み立てる
ブロックを使う:
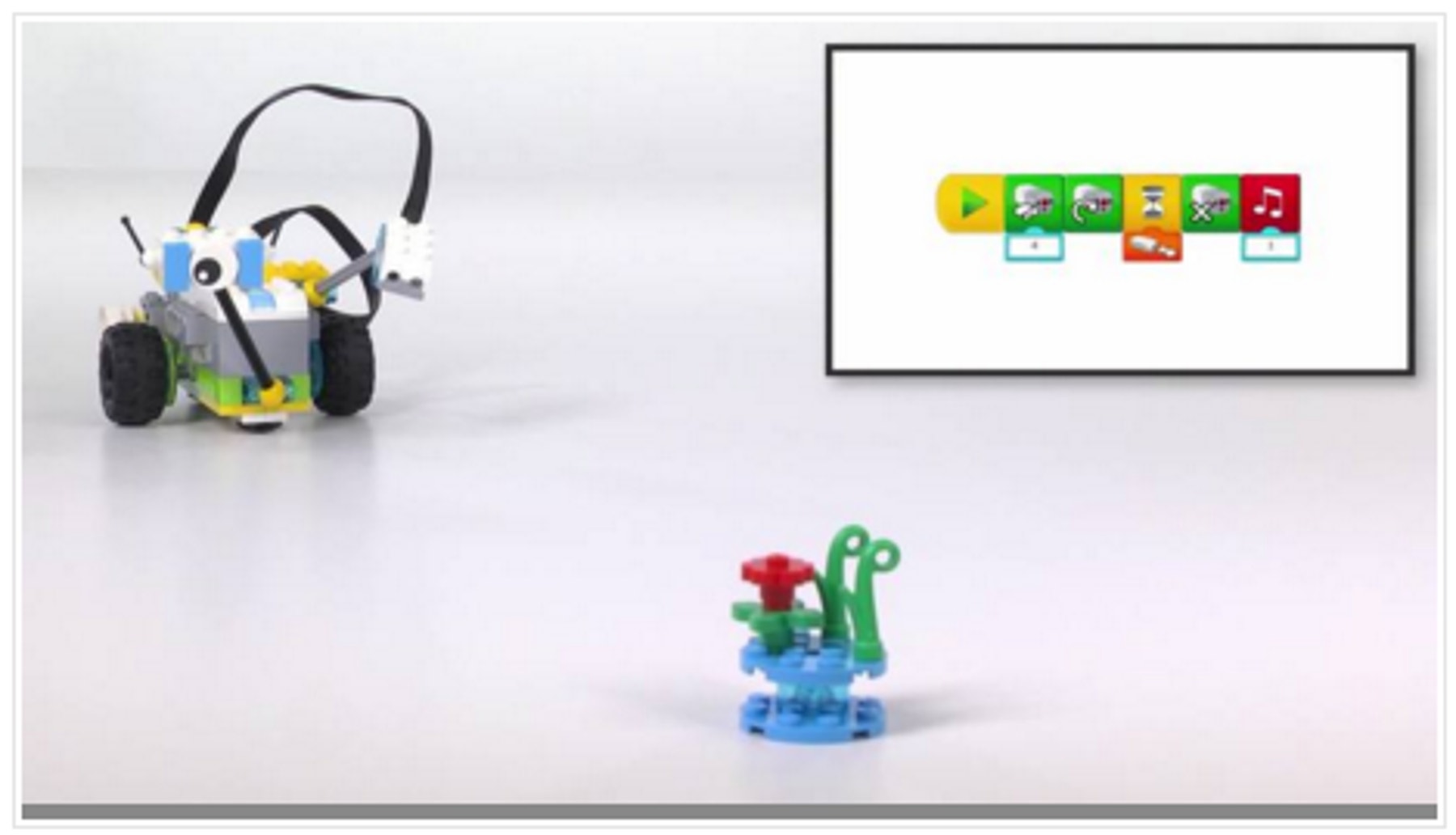
マイロが、植物サンプルのある場所で停止できるよう、物体を検出できるアームを組み立てましょう。

スマートハブの電源を入れ、デバイスに接続します。やり方がわからない場合は、ビデオを見てください。
ヒントが必要な場合は、ヘルプパネルを見てください。
植物サンプルを検出したら、その目の前で止まるようマイロをプログラミングします。

3. 発表する
マイロが、植物サンプルに近づく様子をビデオに撮りましょう。
マイロの任務を記録します。
