첫 번째 기어
기어가 무엇일까요?

기어는 동작을 전달하는 기능을 해요. 톱니에 의해 서로 맞물려 움직이죠. 즉, 하나의 기어가 다른 기어를 구동하며, 그렇게 연이어 기어를 돌릴 수 있어요.
두 개의 기어가 맞물리면 회전 방향이 어떻게 될까요?
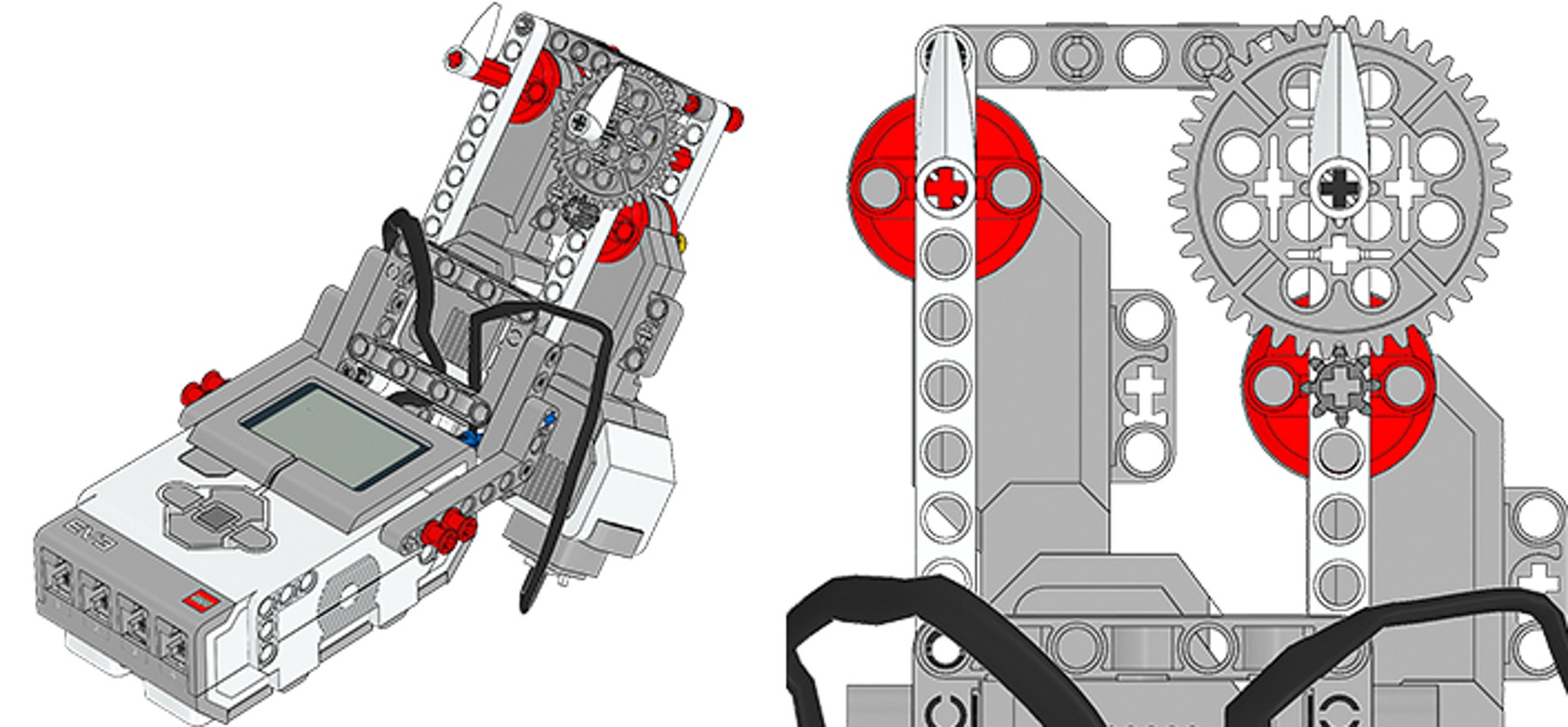
이 *기어 모델*을 조립하세요.
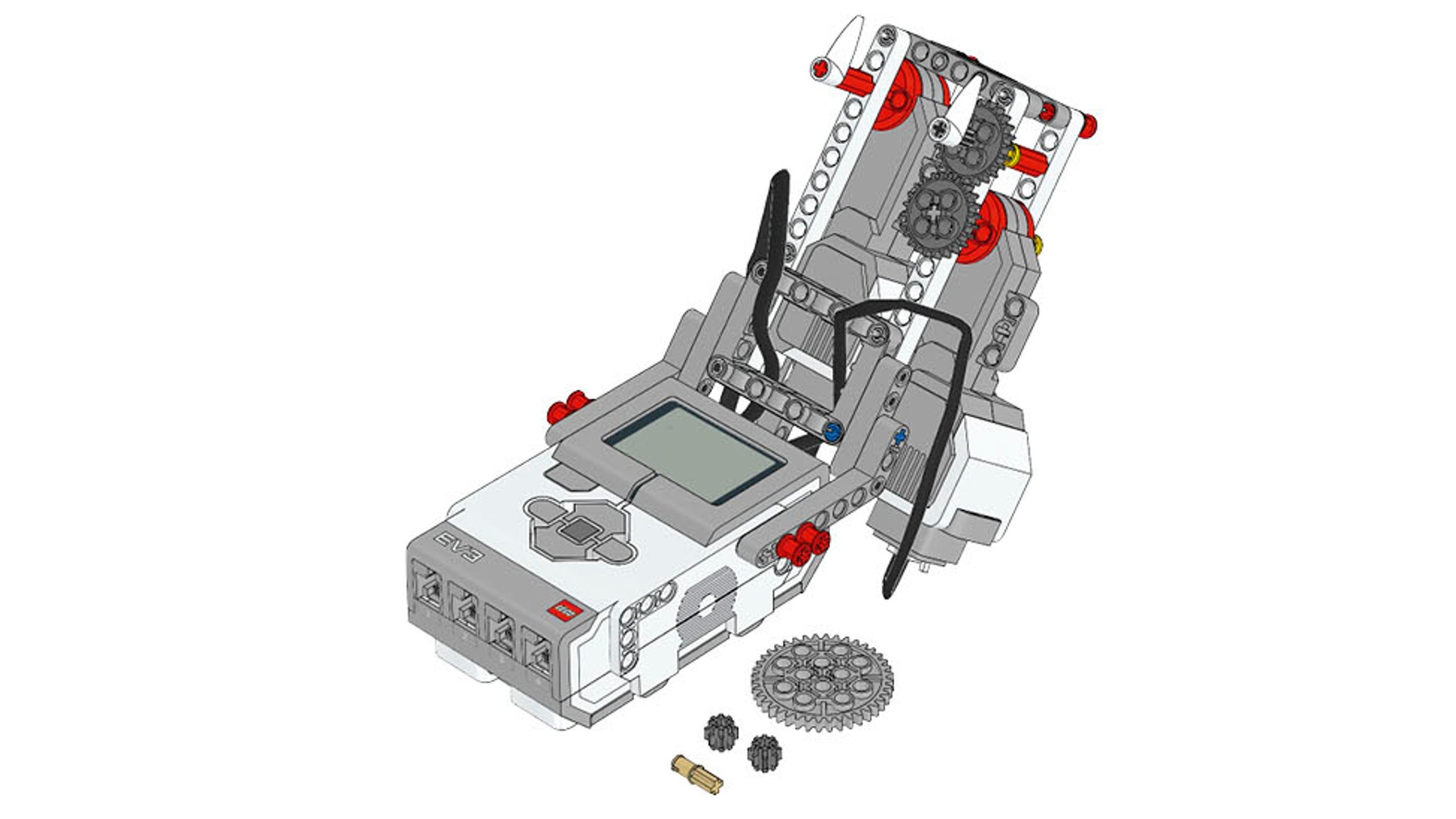
기어의 기초 원리를 탐구하는 데 도움이 될 거예요.
테스트를 해보세요.

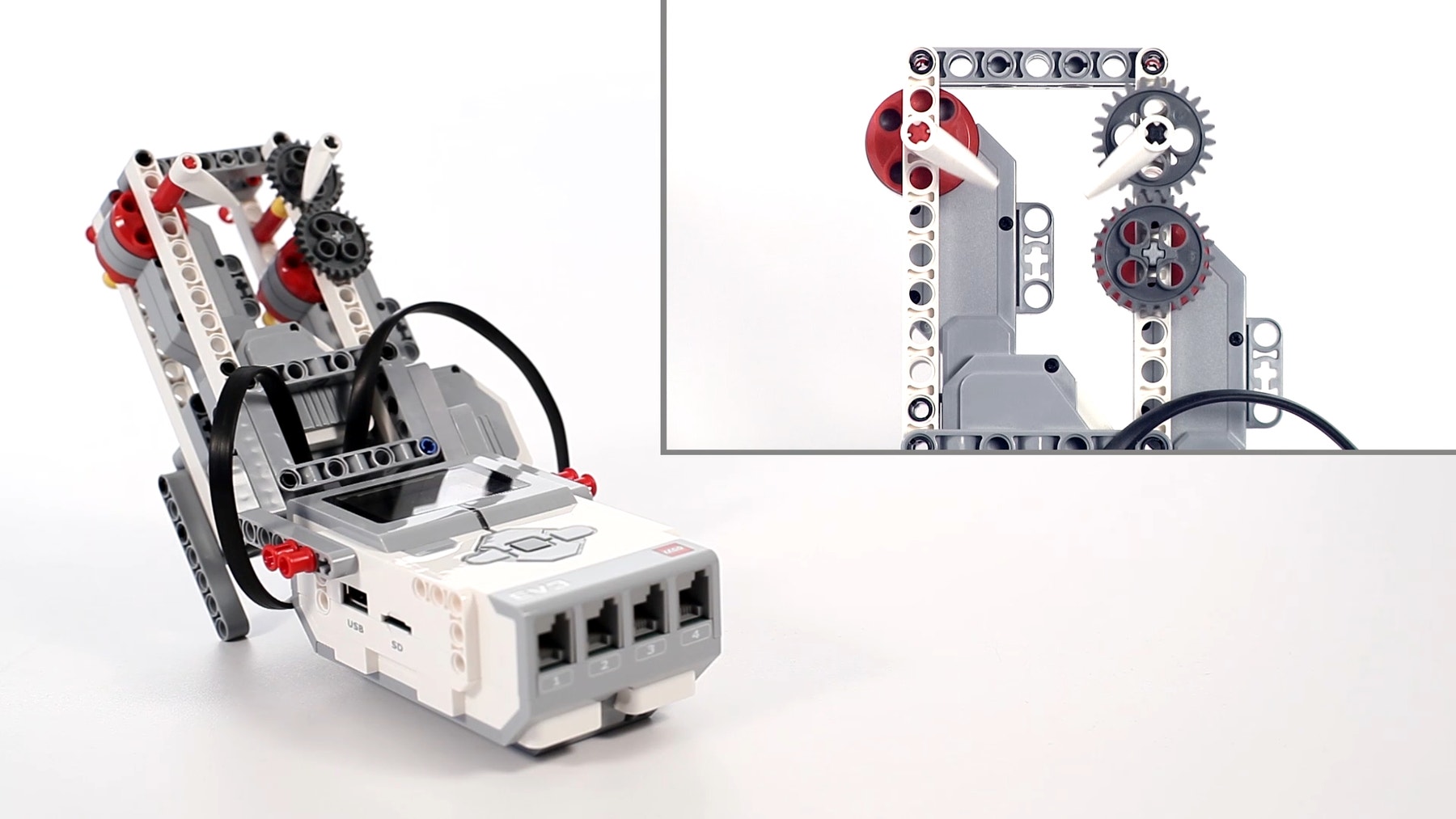
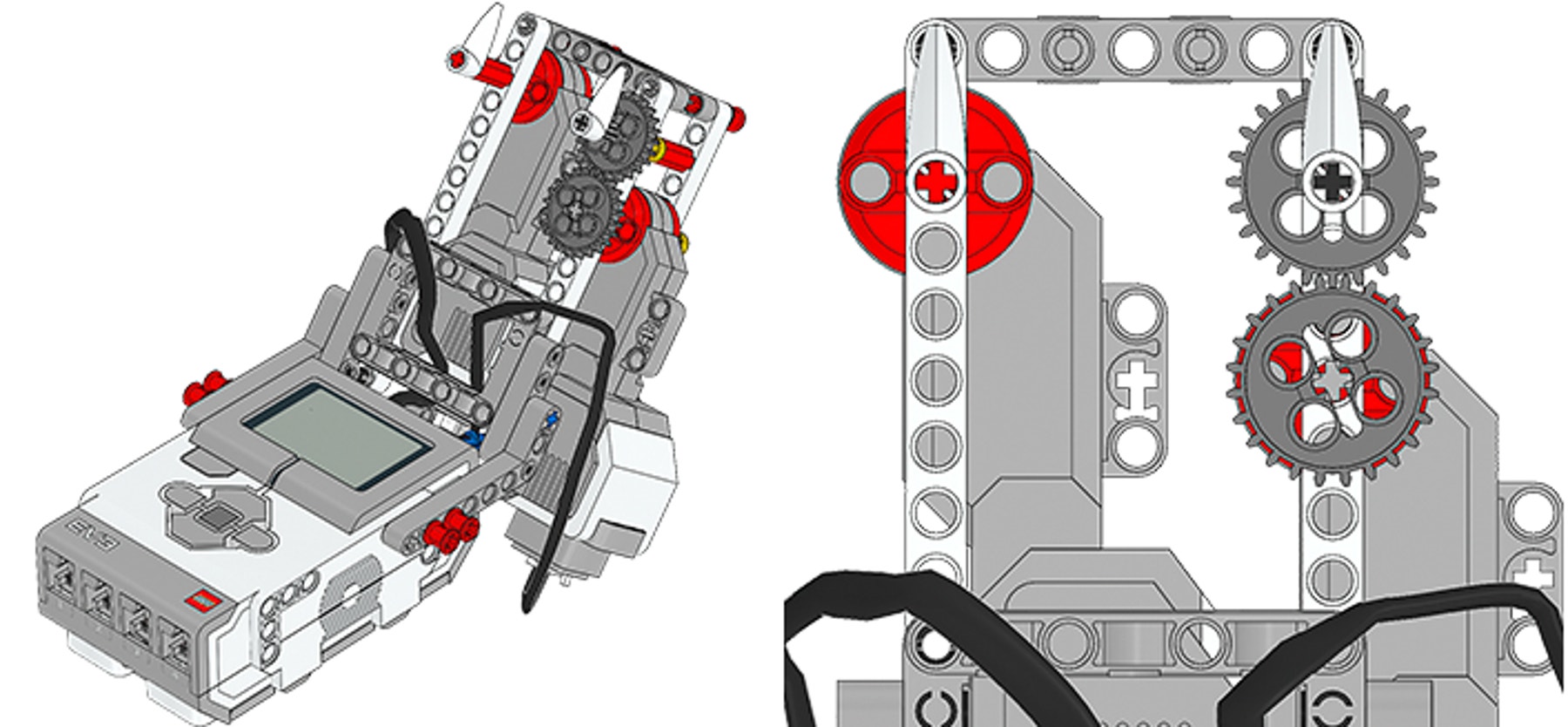
모델을 단단하고 평평한 표면 위에 놓으세요. 기어의 포인터와 기준 모터의 포인터가 모두 위를 향하도록 해야 해요. 프로그램을 실행하고, 기어 포인터를 추적하여 회전수를 계산하세요. 회전 방향을 관찰해야 해요.
기준 모터가 한 바퀴 회전을 완료하고, 모터 두 개가 동시에 회전을 멈추나요?
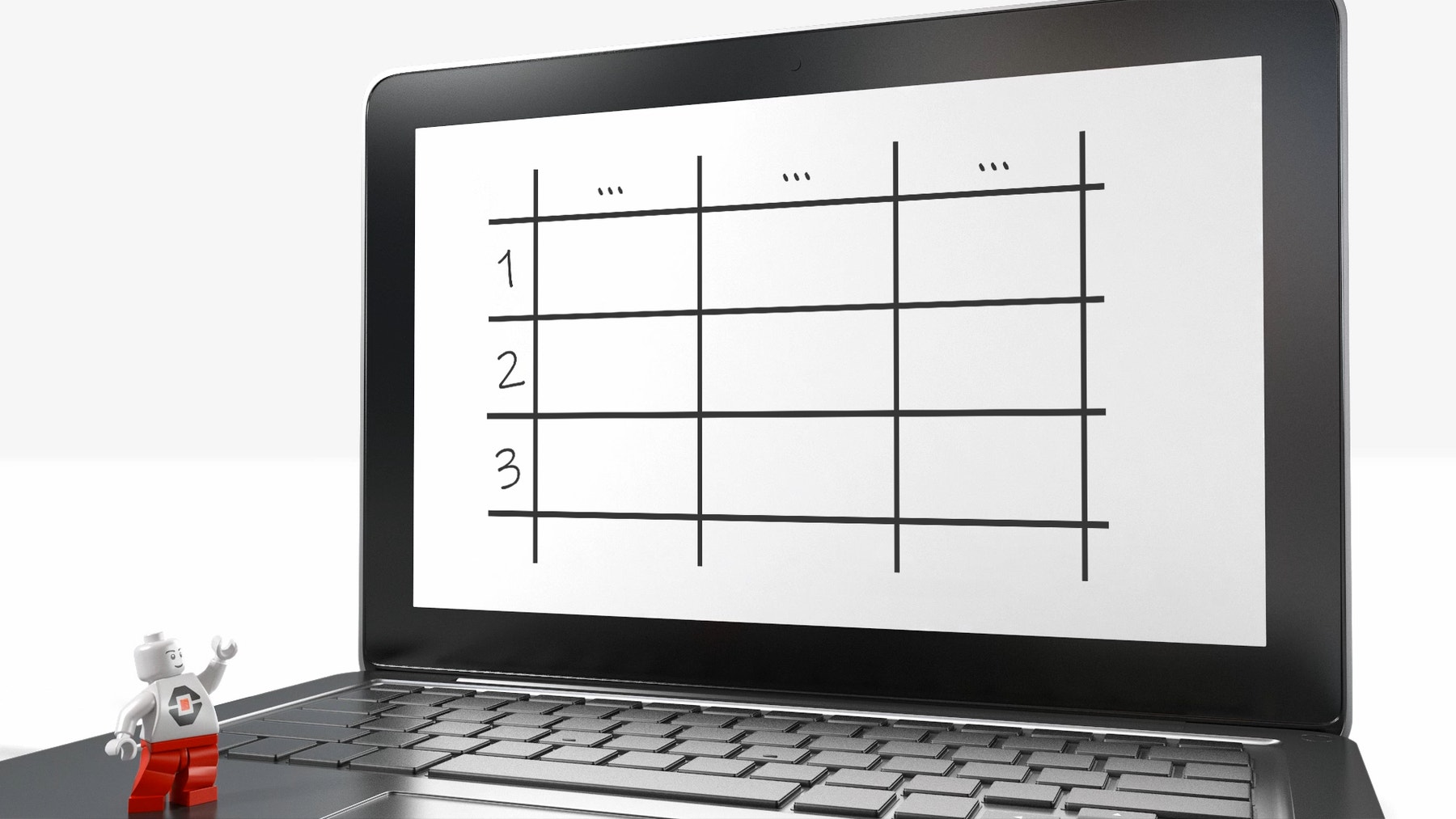
결과를 기록하세요.
실험 번호, 가속 기어인지 감속 기어인지, 기어비, 어떤 일이 일어날 것인지에 대한 예측, 관찰된 회전수, 그리고 회전 방향을 테스트표에 기록하세요. 다른 관측 결과를 기록할 수 있도록 충분한 공간을 남겨두어야 해요.
기본 기어비를 이용해 실험을 수행하고, 아래의 “힌트”에 제시된 다른 기어비를 하나씩 사용하여 실험을 반복하세요.
기어 변속:
이것이 기본 기어비예요. 우선 이걸 해체하세요.
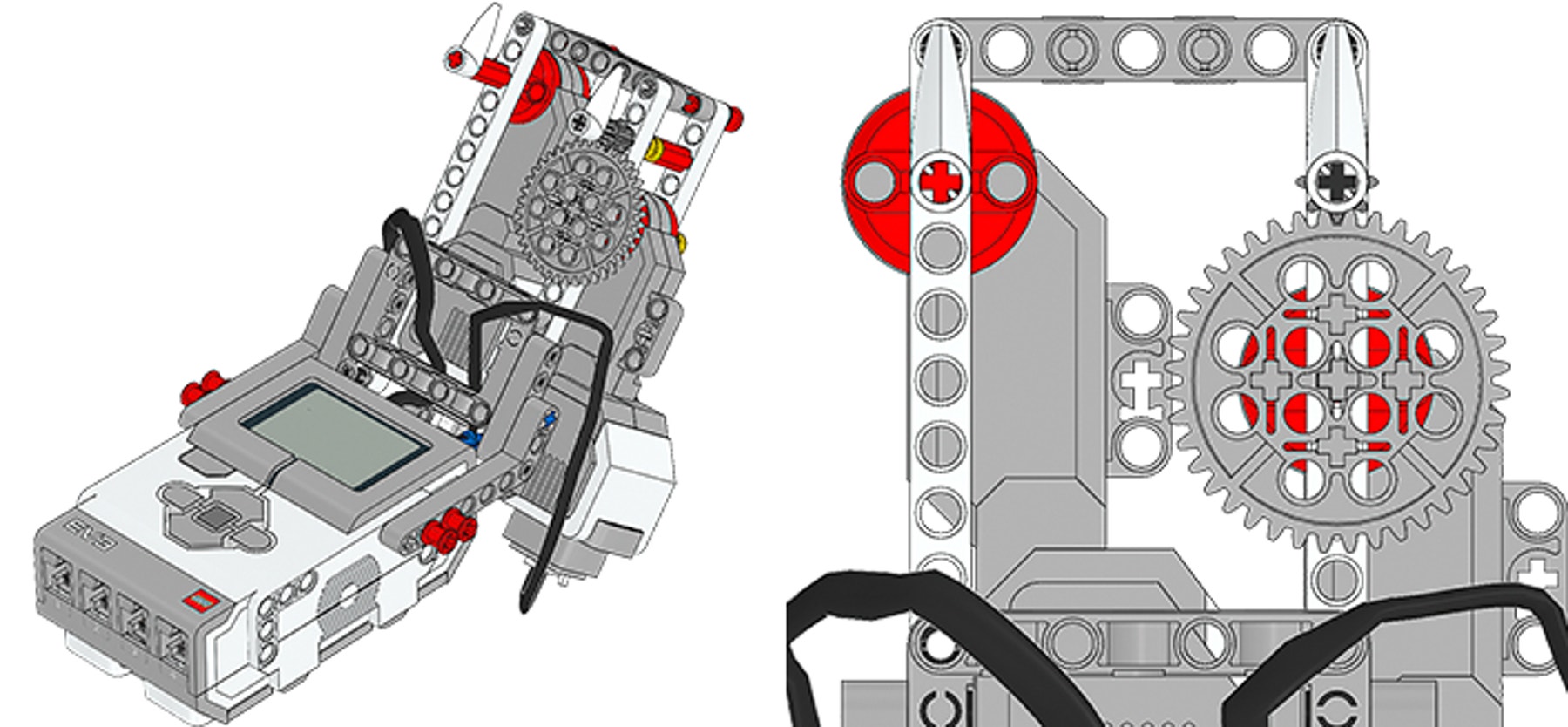
큰 기어와 작은 기어를 사용하여 두 번째 기어비를 만드세요.
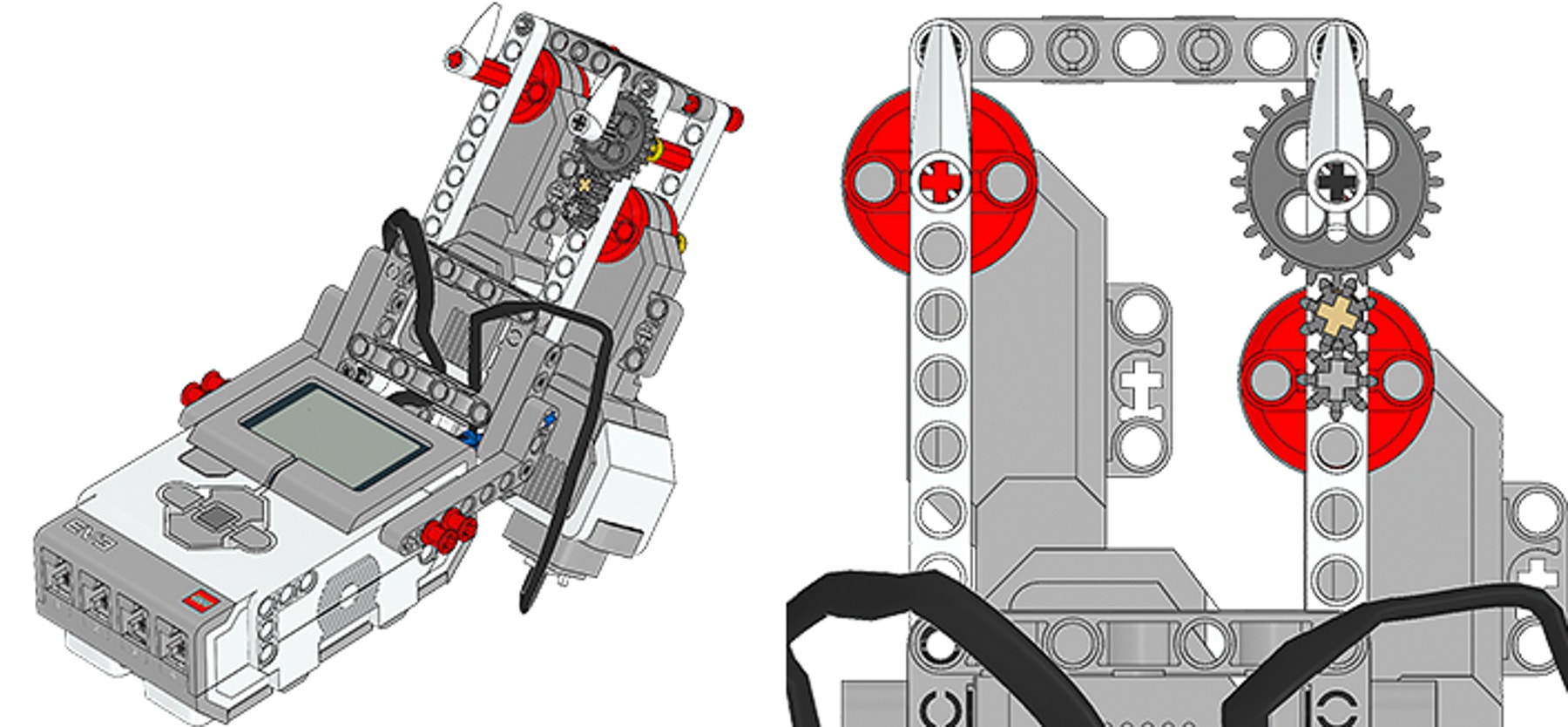
동일한 기어를 사용하여 세 번째 기어비를 만드세요.
끝으로, 세 개의 기어(아이들러 기어 하나 포함)를 이용해 네 번째 기어비를 만드세요.
결과를 요약하세요.
각각의 기어비 옵션에 대한 측정값을 사용하여 기어비가 기어 포인터의 회전 방향 및 회전수와 어떤 관계가 있는지를 분석하세요.
회전 방향과 회전 속도에 대한 예측과 실제 관찰한 결과가 얼마나 일치했나요? 혹시 예상 못했던 부분이 있었나요?
어땠나요?
무엇을 잘했나요? 뭔가 더 잘할 수 있지 않았을까요?
훌륭해요. 이제 간단한 기어 구성에 대한 기초적 지식을 갖추셨어요. 다음 수업으로 달려보아요!