물체와 장애물
드라이빙 베이스는 일종의 모듈형 로봇 플랫폼이에요.

필요에 따라 확장하고 재구성할 수 있다는 말이죠. 주변 환경에 반응할 수 있도록 센서를 붙여주면 장애물을 감지하고 충돌을 피할 수 있을 거예요.
물체를 감지하는 능력을 가진 로봇을 알고 있나요?
직육면체와 이 확장 요소를 조립하세요.
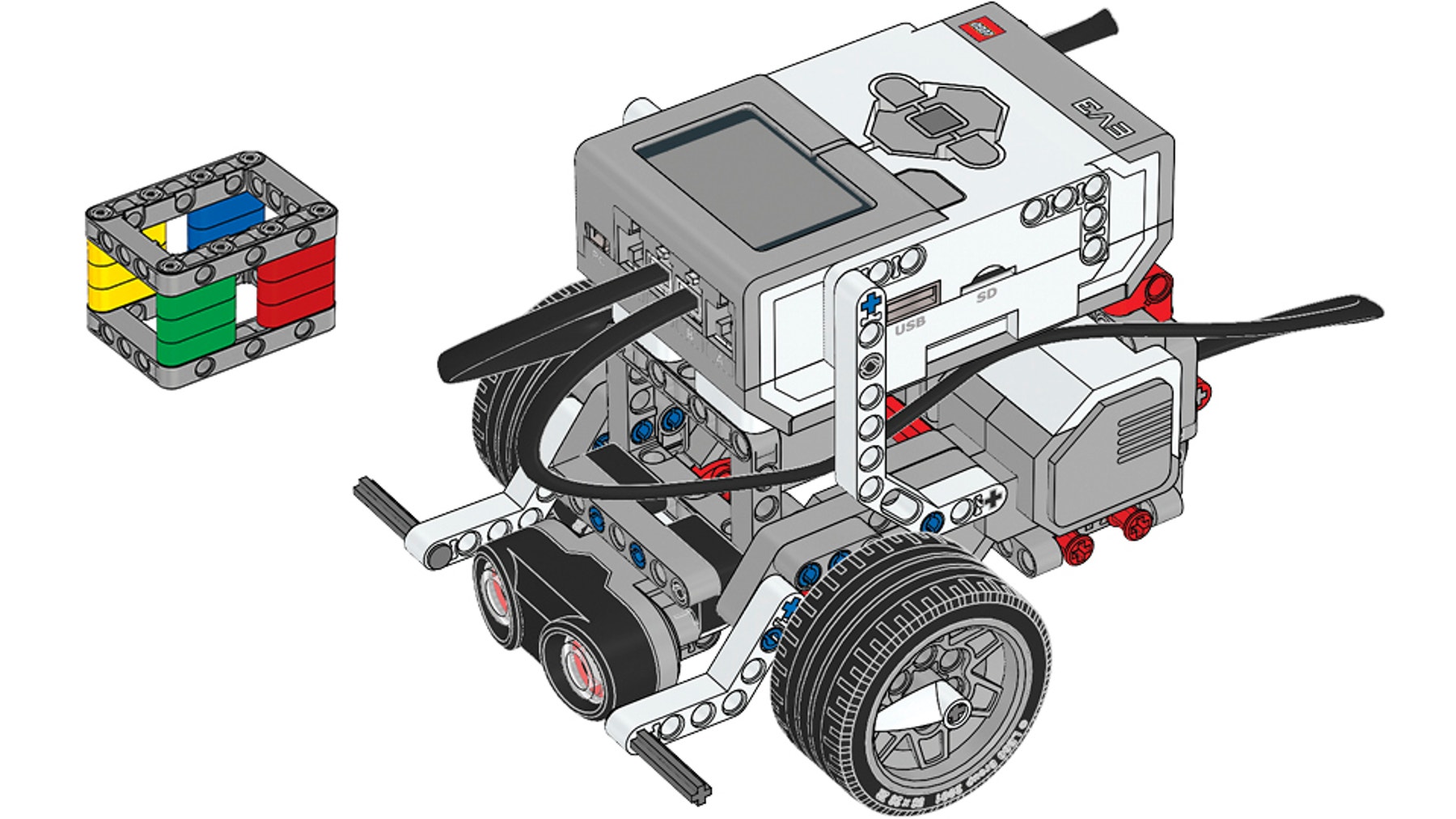
물체와 장애물을 감지하려면 초음파 센서 확장 요소가 필요할 거예요. 직육면체를 조립한 후에 확장 요소를 드라이빙 베이스에 장착하세요.
이 프로그램 스택을 하나씩 시험해보세요.

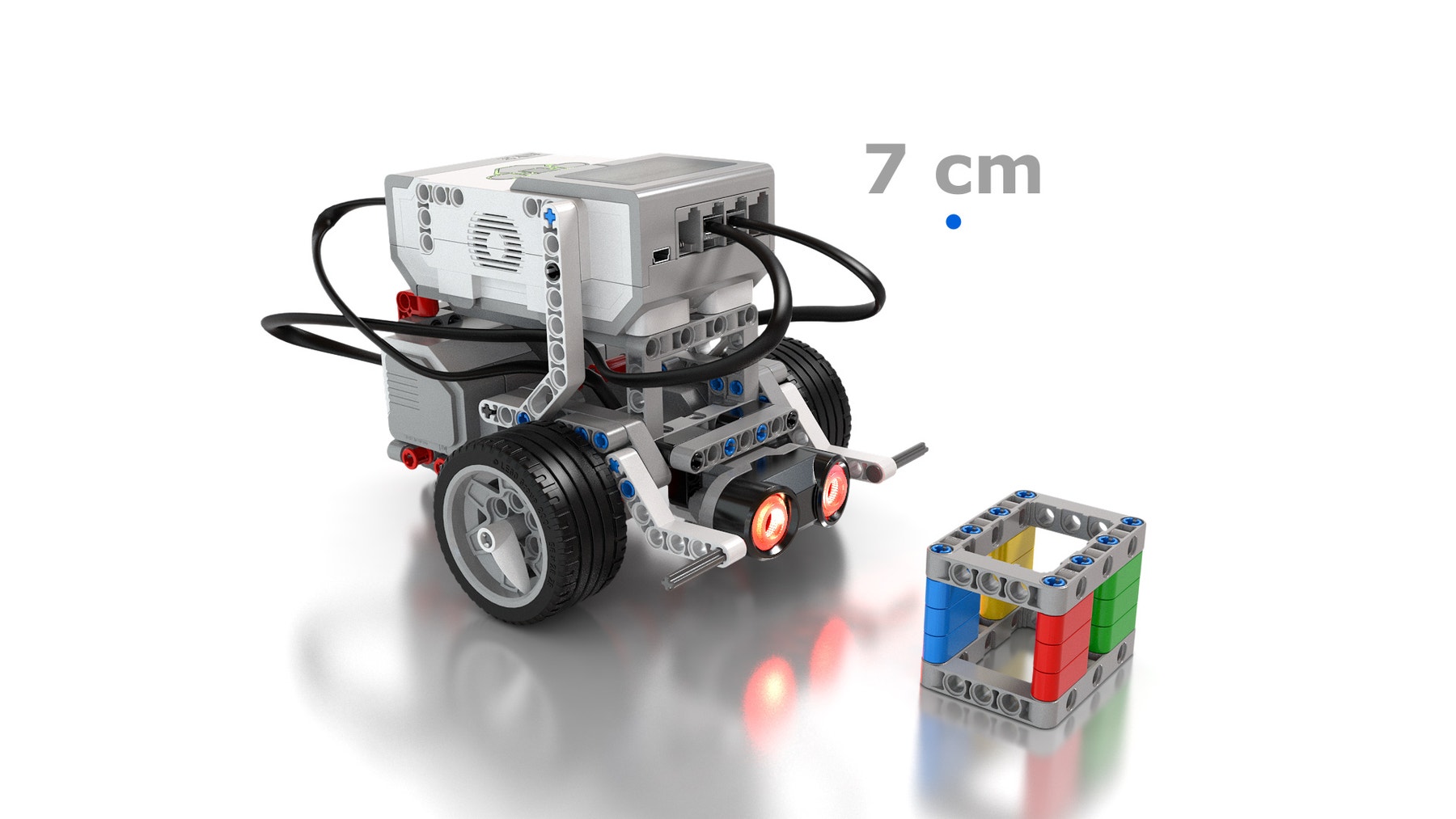
어떤 일이 벌어지나요? 직육면체의 위치를 이리저리 옮겨보세요.
어떤 상황에서 초음파 센서를 사용하여 거리를 측정할 수 있나요?
당신 차례예요!

직육면체와의 거리를 두 가지로 설정하고, 현재 프로그래밍 캔버스에 있는 프로그래밍 스택의 블록을 사용하여 거리에 반응하도록 프로그램을 만들어보세요.
과제를 해결할 시간이에요!
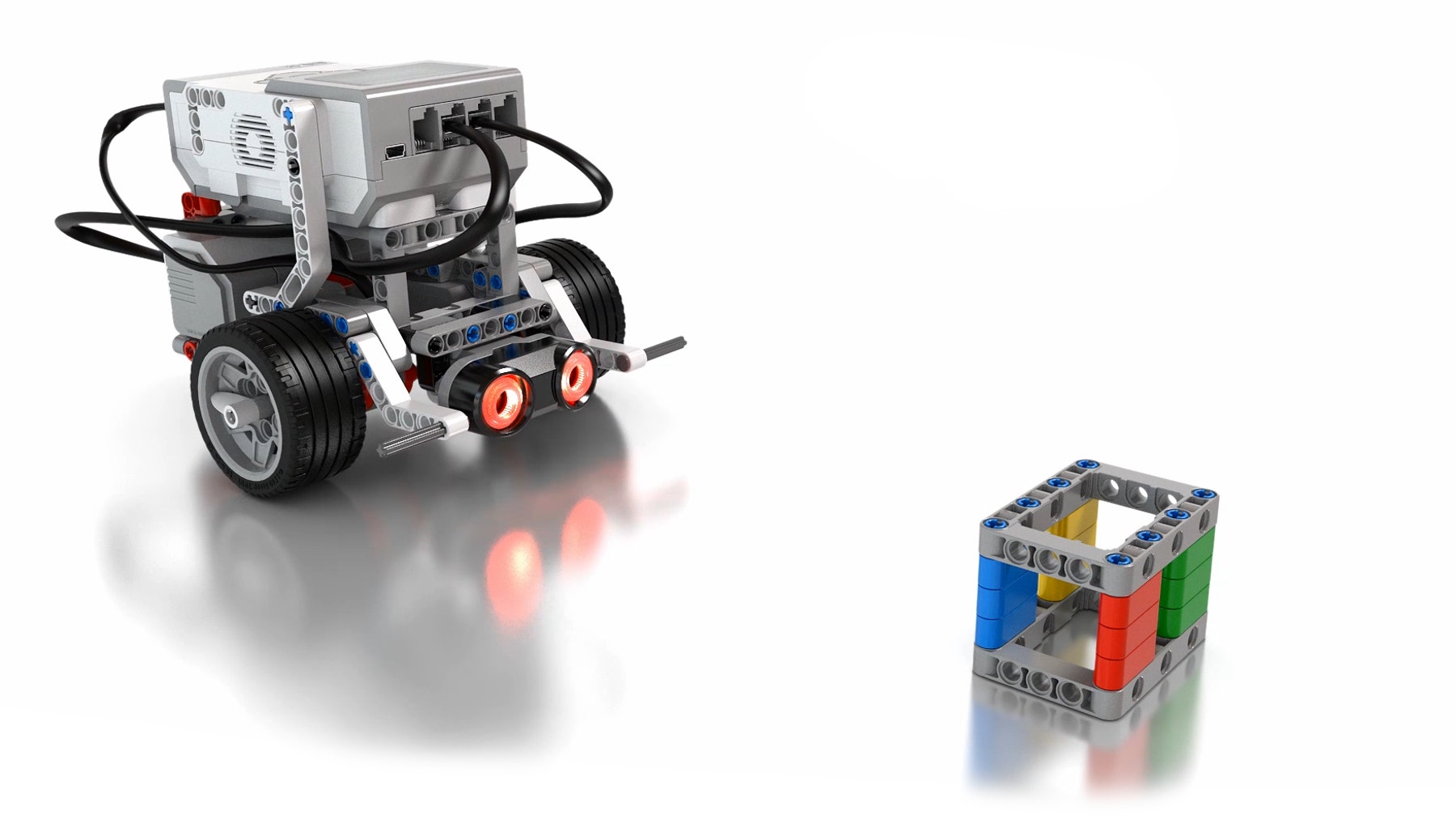
드라이빙베이스가 직육면체와 가까워질수록 더 빨리 또는 더 크게 비프음을 울리도록 프로그램을 작성하세요.
어땠나요?

무엇을 잘했나요? 뭔가 더 잘할 수 있지 않았을까요?
안전 제일! 이제 경로 상의 장애물을 감지하고 대응할 수 있게 되었어요.