잡기와 놓기
전동 공구가 몇 가지 필요해요.
전동 공구를 로봇에 장착하여 여러 가지 과제를 수행하게 해 보면 어떨까요? 우선 작업에 적합한 도구를 찾아야겠죠!
물체를 이리저리 옮기려면 어떤 도구를 드라이빙 베이스에 붙여줘야 할까요?
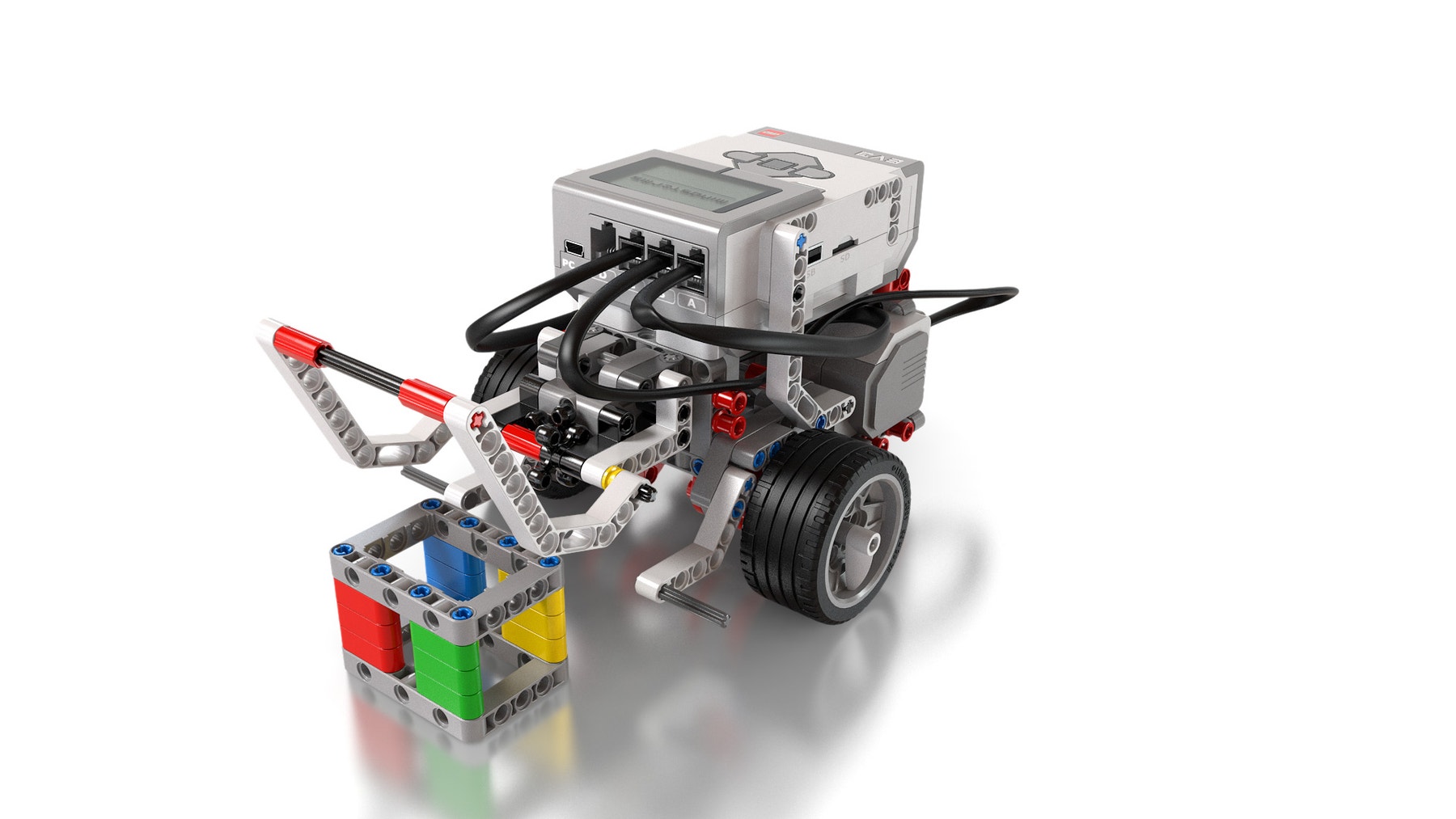
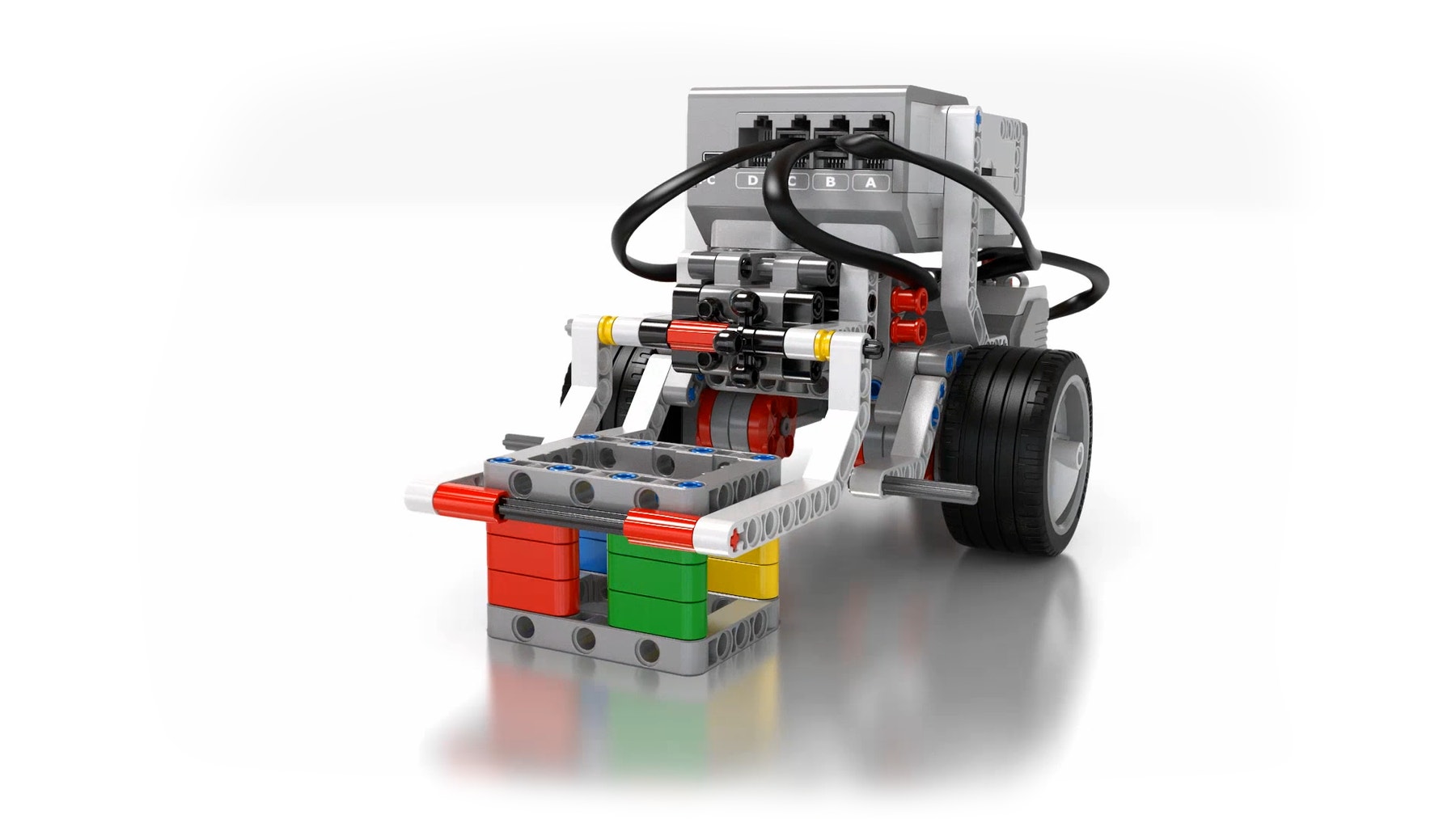
직육면체와 이 확장 요소를 조립하세요.
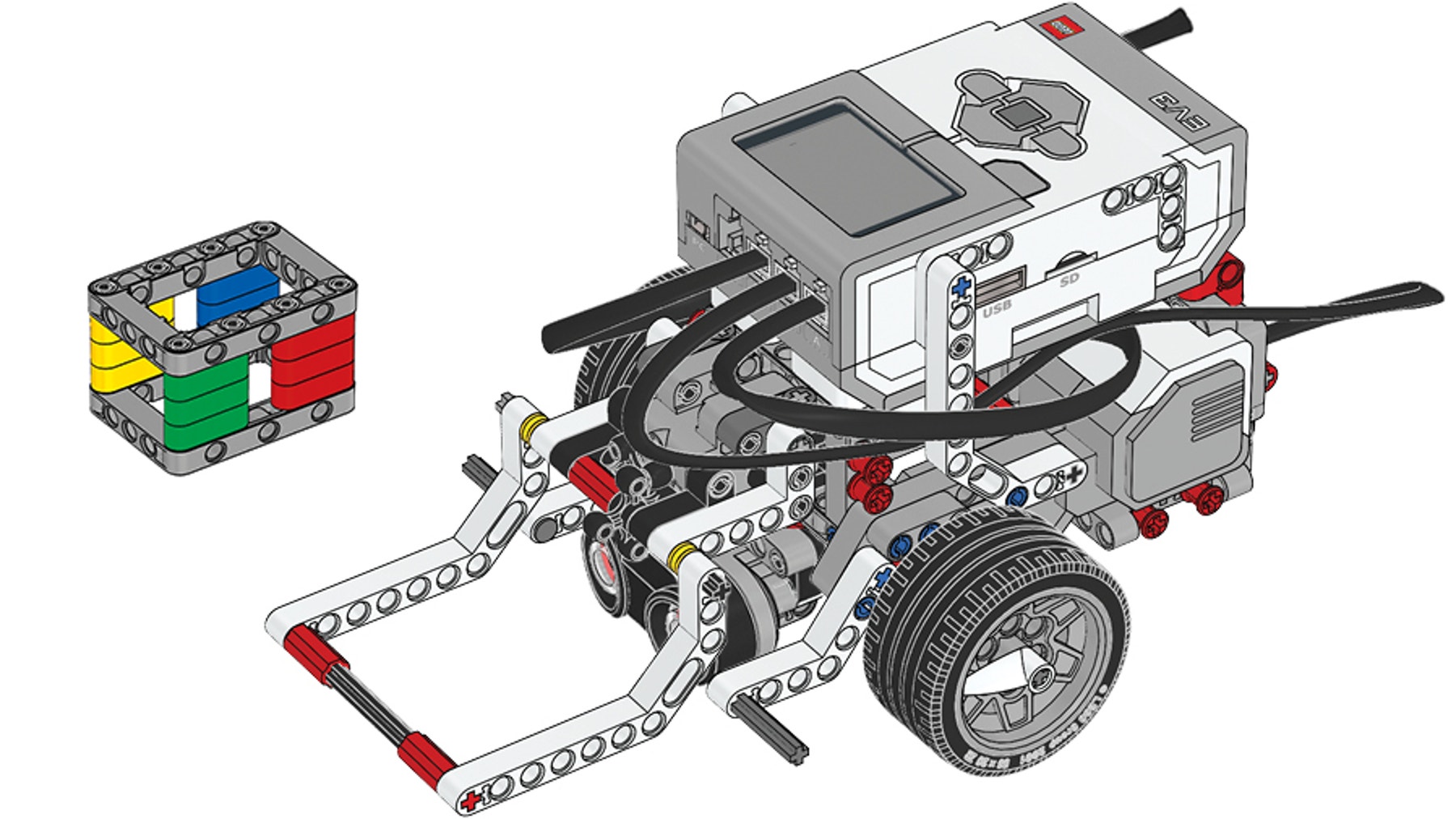
미디엄 모터 확장 요소를 사용하여 직육면체를 잡고 놓을 수 있게 만들어볼 거예요. 아울러 지난 단원에서 사용되었던 초음파 센서 확장 요소가 필요해요. 직육면체를 조립한 후에 확장 요소를 드라이빙 베이스에 장착하세요.
이 프로그램 스택을 하나씩 시험해보세요.

어떤 일이 벌어지나요? 직육면체의 위치를 이리저리 옮겨보세요.
미디엄 모터 확장 요소의 주된 특성은 무엇이고 어떤 한계가 있나요?
당신 차례예요!
현재 프로그래밍 캔버스에 있는 프로그래밍 스택의 블록을 사용하여 직육면체를 붙잡고, 몇 바퀴 전진하고, 직육면체를 놓고, 마지막으로 후진하여 시작 위치로 되돌아올 수 있게 프로그램을 작성하세요.
과제를 해결할 시간이에요!

드라이빙 베이스가 초음파 센서를 사용하여 직육면체 근처에서 멈춘 후, 팔을 내려 직육면체를 붙잡고 시작 위치에 도로 갖다 놓도록 프로그램을 작성하세요.
어땠나요?
무엇을 잘했나요? 뭔가 더 잘할 수 있지 않았을까요?
해냈어요! 이제 얼마든지 물체를 붙잡거나 놓고 원하는 곳으로 옮길 수 있겠죠.