공장 로봇
확장 요소를 설계하여 드라이빙 베이스에 장착하고, 두 가지 과제를 완료하도록 프로그램을 작성하세요.

수업 계획
1. 준비
- EV3 클래스룸 앱의 학생용 자료를 읽으세요.
- 자율주행 바퀴형 로봇이 공장과 창고에서 수행하는 일에 관한 정보를 수집하세요.
- 수업을 위해 검은색 테이프, 마커, 줄자, 공장 내의 이동경로를 만들기 위한 커다란 물체가 필요합니다.
- 이 과제를 시작하기 전에 학생들이 이 학습단원의 다른 수업들을 완료할 것을 권장합니다.
- 수업의 진행을 위해 학생들이 드라이빙 베이스 모델을 조립해야 하며, 약 30분의 시간이 소요됩니다.
- 연강 시간을 갖기 어려울 경우, 이 수업을 여러 번에 걸쳐 진행하도록 계획을 세우세요.
파트 A
2. 착수(10분)
- 학생들이 아래 토의 시작 섹션에 제시된 아이디어를 이용해 이 수업과 관련된 토의를 시작하게 하세요.
- 학생들이 두 명씩 팀을 이루게 하세요.
3. 탐구(35분)
- 학생들에게 아이디어를 브레인스토밍하고, 드라이빙 베이스가 직육면체를 붙잡아 와서 목표 지점의 원 모양 한 가운데(즉, “목적지 구역”)에 내려놓게 만들 방법을 찾아내게 하세요.
- 학생들에게 여러 개의 프로토타입을 만들고 조립과 프로그래밍 측면을 모두 살펴보게 하세요.
- 학생들이 솔루션을 조립하고 테스트할 수 있게 시간을 배정하세요.
파트 B
4. 설명(10분)
- 선을 따라가다가 대형 물체 앞에서 멈추는 동작을 구현해주는 로봇의 주요 기능에 대해 토의를 진행하게 하세요.
5. 다듬기(35분)
- 학생들에게 드라이빙 베이스의 기능을 확장하기 위한 아이디어를 브레인스토밍하게 하세요. 목표는 드라이빙 베이스가 선을 따라가다가 대형 물체와 최대한 가까운 곳에 멈추도록 하는 것이에요.
- 학생들에게 과제를 완료할 준비가 될 때까지 로봇을 계속 수정하게 하세요.
- 뒷정리를 위한 약간의 시간을 남겨두는 것을 잊지 마세요.
6. 평가
- 학생 개개인의 성과에 대해 피드백을 제공해주세요.
- 솔루션의 창의성과 팀의 협력 수준을 평가하세요.
- 활동평가표를 사용하면 프로세스를 단순화할 수 있습니다.
토의 시작
레고® 공장에서 자율주행 로봇이 하는 일 중의 하나가 바로 작업대 사이에서 상자를 옮기는 일이에요. 이 전자동 로봇은 심지어 배터리가 부족해지면 알아서 충전소를 찾아가기까지 한답니다! 벽, 사람 또는 다른 로봇과 부딪히지 않고 효율적으로 작업을 수행하죠.

이러한 질문을 사용하여 학생들에게 드라이빙 베이스가 레고 공장의 로봇과 유사한 과제를 수행할 수 있도록 만드는 방법에 대해 토의를 시작하게 하세요.
- 드라이빙 베이스를 사용하여 레고 공장의 로봇과 유사한 작업을 수행할 수 있을 것으로 생각하나요?
- 이전 수업에서 다루었던 확장 요소 중 어느 것이 이 과제를 위해 유용할까요?
프로젝트 개요
확장 요소를 설계하여 드라이빙 베이스에 장착하고, 이렇게 프로그램을 작성하세요.
- 직육면체를 붙잡고 목적지의 원 모양 정중앙에 최대한 가까이 이동한 후, 놓아주세요.
- 선을 감지하고 따라 이동한 후, 커다란 물체와 최대한 가까운 곳에 멈추세요(단, 접촉하면 안 돼요).

조립 요령
개방형 솔루션
이 프로젝트는 모든 팀이 독창적인 솔루션을 찾아내도록 하기 위한 목적으로 구상되었어요. 이러한 질문을 제기하고, 각 팀별로 프로젝트의 해결을 위한 아이디어를 브레인스토밍하게 하세요.
- 로봇이 어떻게 목적지 구역의 중심을 찾아 이동할 수 있을까요?
- 로봇이 어떻게 대형 물체에 최대한 가까이 다가간 후에 선 따라가기를 멈출 수 있을까요?
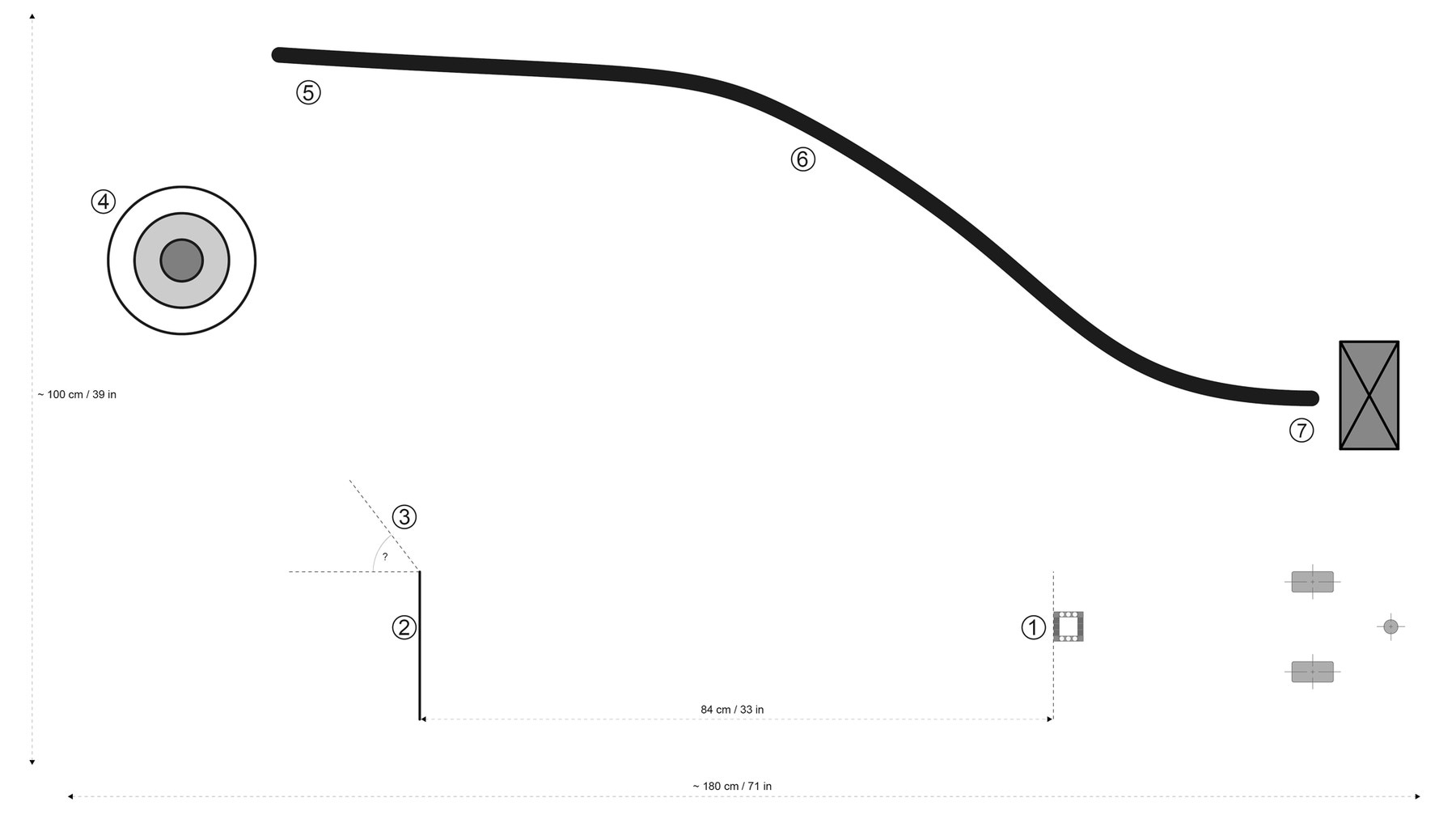
공장 경로 설정
아래의 그림과 같이 경로를 만들기 위해 학생들이 검은색 테이프, 마커, 줄자, 직육면체, 그리고 검정색 라인 끝에 놓아둘 커다란 물체를 준비해야 합니다. 그림에 표시된 수치는 예시에 불과하며, 정확히 따르지 않아도 됩니다. 단, 예제 솔루션과 솔루션 프로그램은 이 수치에 기초하여 도출되었습니다.
예제 솔루션
예제 솔루션에 포함되어 있는 확장 요소는 다음과 같습니다.
자이로 센서 사용
자이로 센서를 EV3 브릭에 연결하고 EV3 브릭을 시작하는 동안 자이로 센서가 전혀 움직이지 않게 해야 해요. 드라이빙 베이스가 움직이지도 않는데 자이로 센서의 각도 측정값이 바뀔 경우, 센서를 분리했다가 다시 연결하세요.
코딩 요령
솔루션 프로그램

차별화
수업을 단순화하는 방법:
- 학생들과 함께 참여하여, 대형 물체가 감지되는 순간 선 따라가기를 멈추는 방법을 찾는 과정을 도와주세요.
- 학생들에게 이 학습단원의 이전 수업 내용을 다시 살펴보게 하세요.
- 학생들에게 선을 따라가지 말고 그냥 대형 물체를 향해 이동하게 해보세요.
- 학생들에게 서로 가르쳐주고 코칭할 것을 장려하세요.
수업의 수준을 한 단계 높이는 방법:
- 학생들에게 로봇이 직육면체를 붙잡고 정확히 84cm만큼 전진한 후 자이로 센서를 사용하여 목표 지점인 원으로 향하게 하세요.
- 학생들에게 색상과 선 수업에 사용되었던 재료 대신 여러 가지 색상의 테이프를 사용하게 하세요.
평가 기회
교사 관찰 체크리스트
교사의 요구 사항에 맞는 척도를 만드세요(예시 참조).
- 부분적으로 달성됨
- 완전하게 달성됨
- 초과 달성됨.
아래의 성공 기준을 이용해 학생들의 진척도를 평가하세요.
- 학생들이 프로젝트 개요의 요구 사항에 부합하는 로봇을 디자인하였다.
- 학생들이 창의적 솔루션을 찾아냈고 여러 가지의 솔루션을 고려하였다.
- 학생들이 한 팀으로 활동하며 과제를 완수하였다.
자기 평가
학생 개개인에게 자신의 성과를 가장 잘 나타낸다고 생각되는 레벨을 선택하게 하세요.
- 브론즈: 어려운 상황에서도 최선을 다하였다.
- 실버: 중간에 몇 번 사고가 있었지만, 과제 중 하나를 완료하였다.
- 골드: 두 가지 과제를 완료하고 탁월한 결과를 얻었다.
- 플래티넘: 두 가지 과제를 모두 완료했을 뿐 아니라 독창적이고 효과적인 기능을 추가하였다.

국어교과 확장
국어교과 기술 계발 요소의 통합:
- 학생들에게 로봇의 기능과 성능을 강조하여 설명하기 위한 프레젠테이션 또는 동영상을 만들게 하세요.
- 학생들에게 프로그램의 중요한 기능을 설명하기 위한 프레젠테이션을 만들게 하세요.
참고: 이렇게 할 경우 수업이 더 길어집니다.
진로 연결
이 수업이 즐거웠던 학생이라면 아마 다음과 같은 진로 개발 영역에 대해서도 관심이 있을 것입니다.
- 정보 기술(컴퓨터 프로그래밍)
- 제조 및 엔지니어링(예비 엔지니어링)
- 과학, 기술, 공학 및 수학(엔지니어링 및 기술)
교사 지원
학생 과제:
- 도전 과제를 해결하는 능력을 보여주세요.
레고® 마인드스톰® 에듀케이션 EV3 코어 세트
EV3 클래스룸 앱
검은색 테이프.
마커.
줄자.
대형
각도기(선택 사항)
2015 개정교육과정
추상화와 알고리즘[9정03-04]
문제 해결을 위한 다양한 방법과 절차를 탐색하고 명확하게 표현한다.
프로그래밍[9정 04-05]
실생활 문제 해결을 위한 소프트웨어를 협력하여 설계, 개발, 비교 분석한다.
공학의 기초[12공학 01-05]
공학 문제의 다양한 해결책을 창의적으로 설계한다.
프로그래밍[12정보04-09]
다양한 학문 분야의 문제 해결을 위한 알고리즘을 협력하여 설계한다.




