스위치
스위지 블록율 사용하여 동적 센서에 기반한 결정 율 내립니다.
테스트하기
제시된 프로그램을 다시 만든 다음, 다운로드 및 실행하여 테스트하세요. 드라이빙 베이스가 라인을 따라가지 않나요? 여기를 클릭하여 센서 경계값을 설정하세요.
힌트
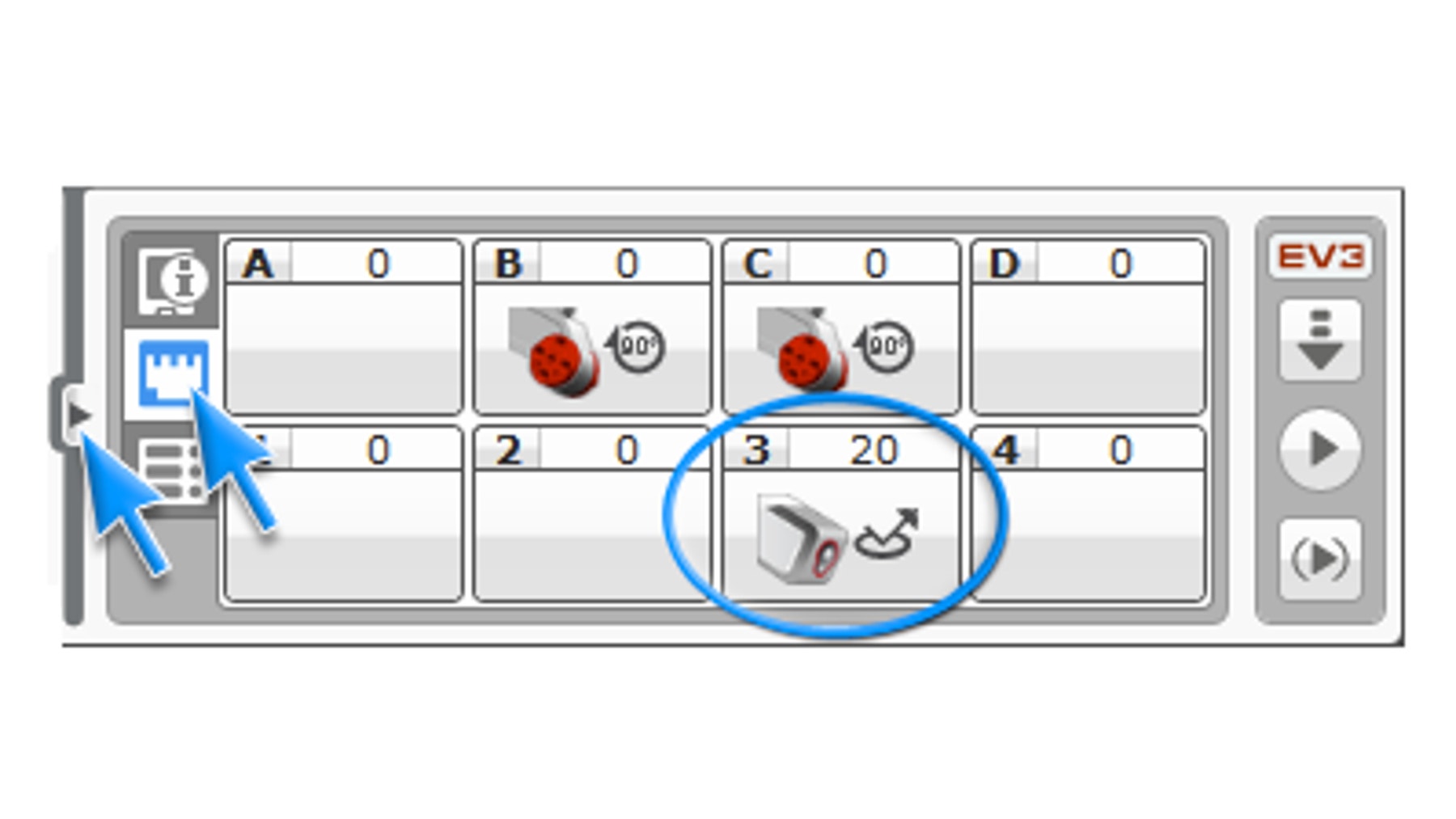
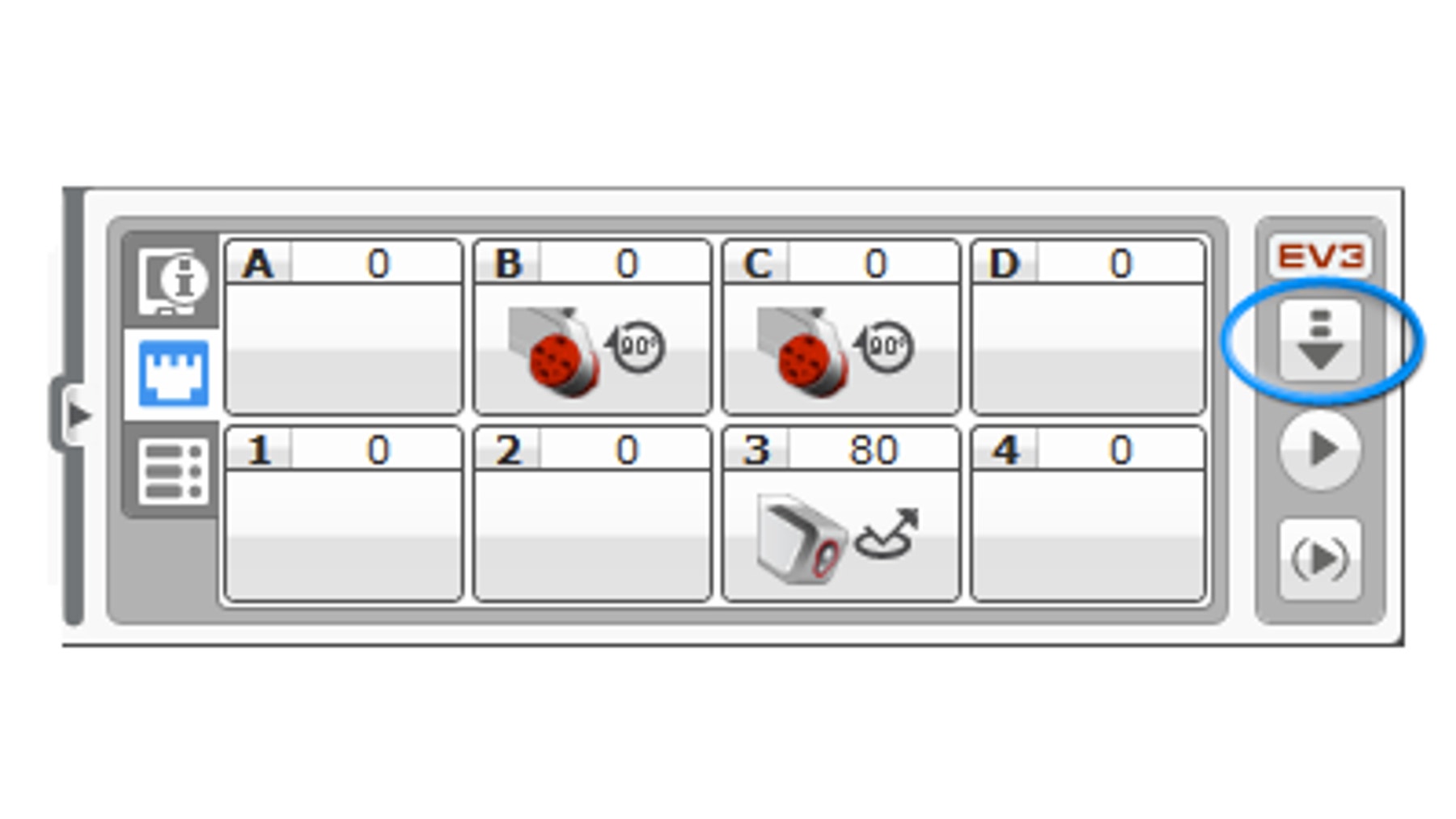
EV3 브릭에서 포트 보기 앱을 사용하면 실시간 센서값도 볼 수 있습니다.
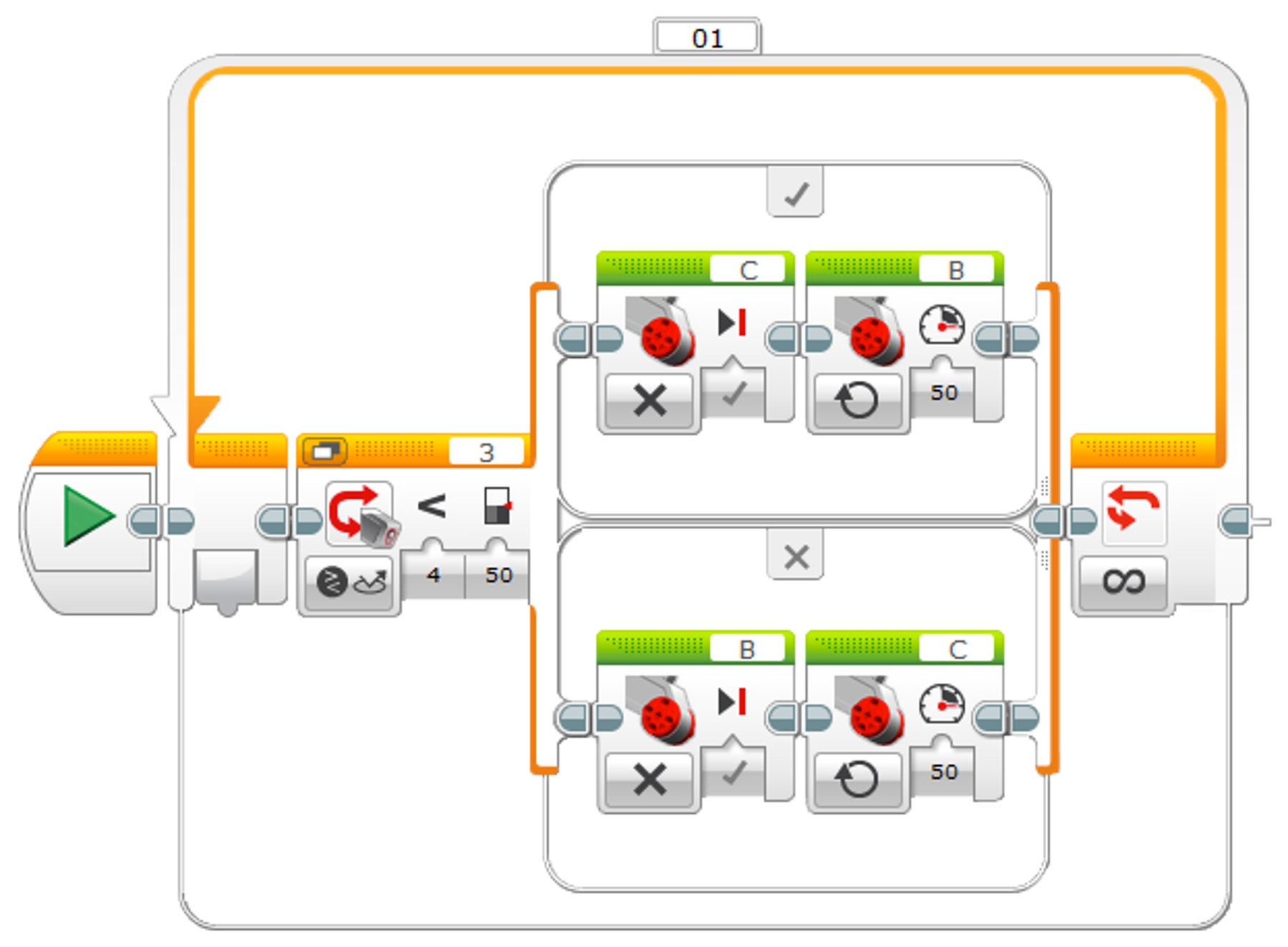
프로그램 요약
시작
루프 – 무한
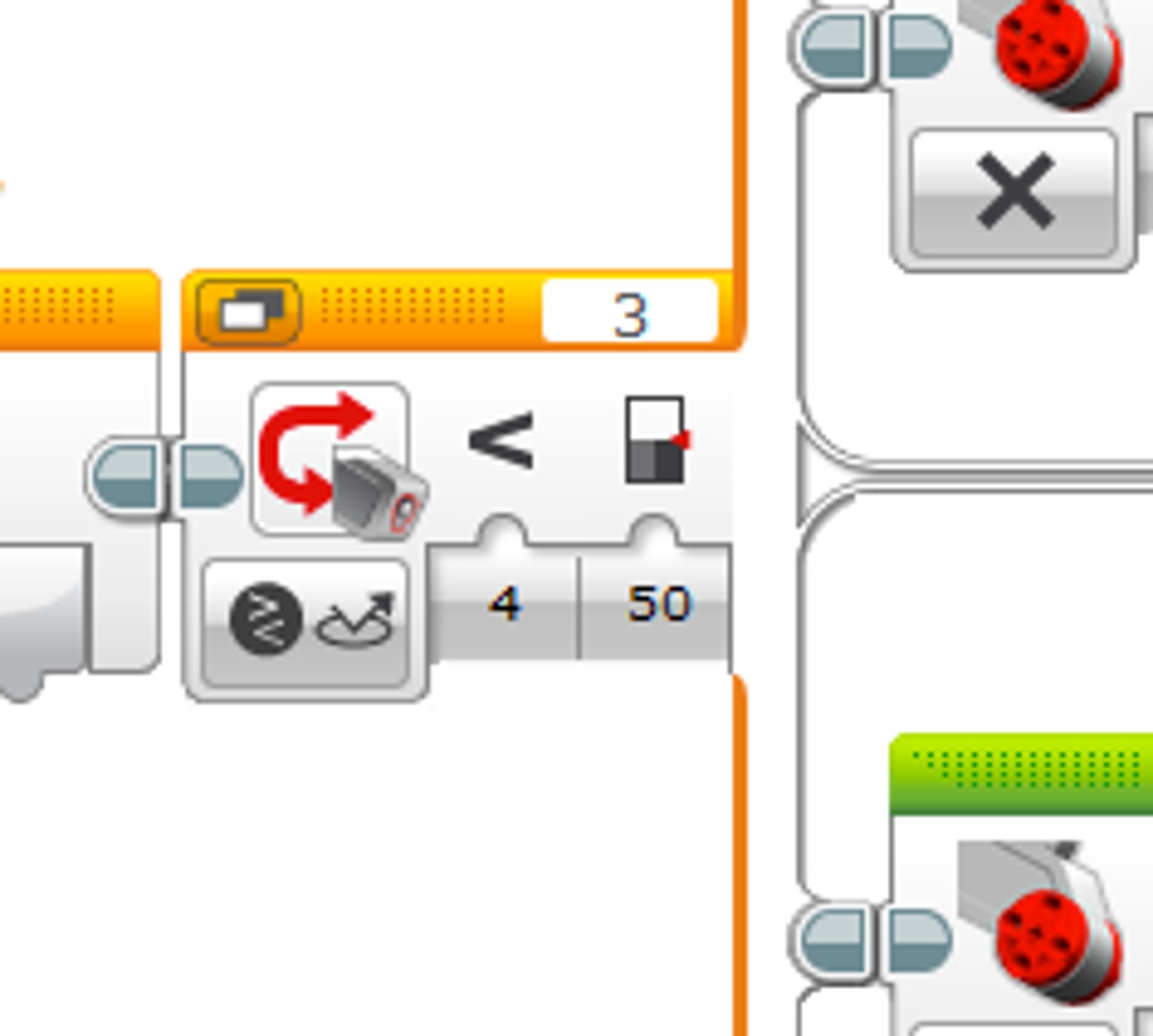
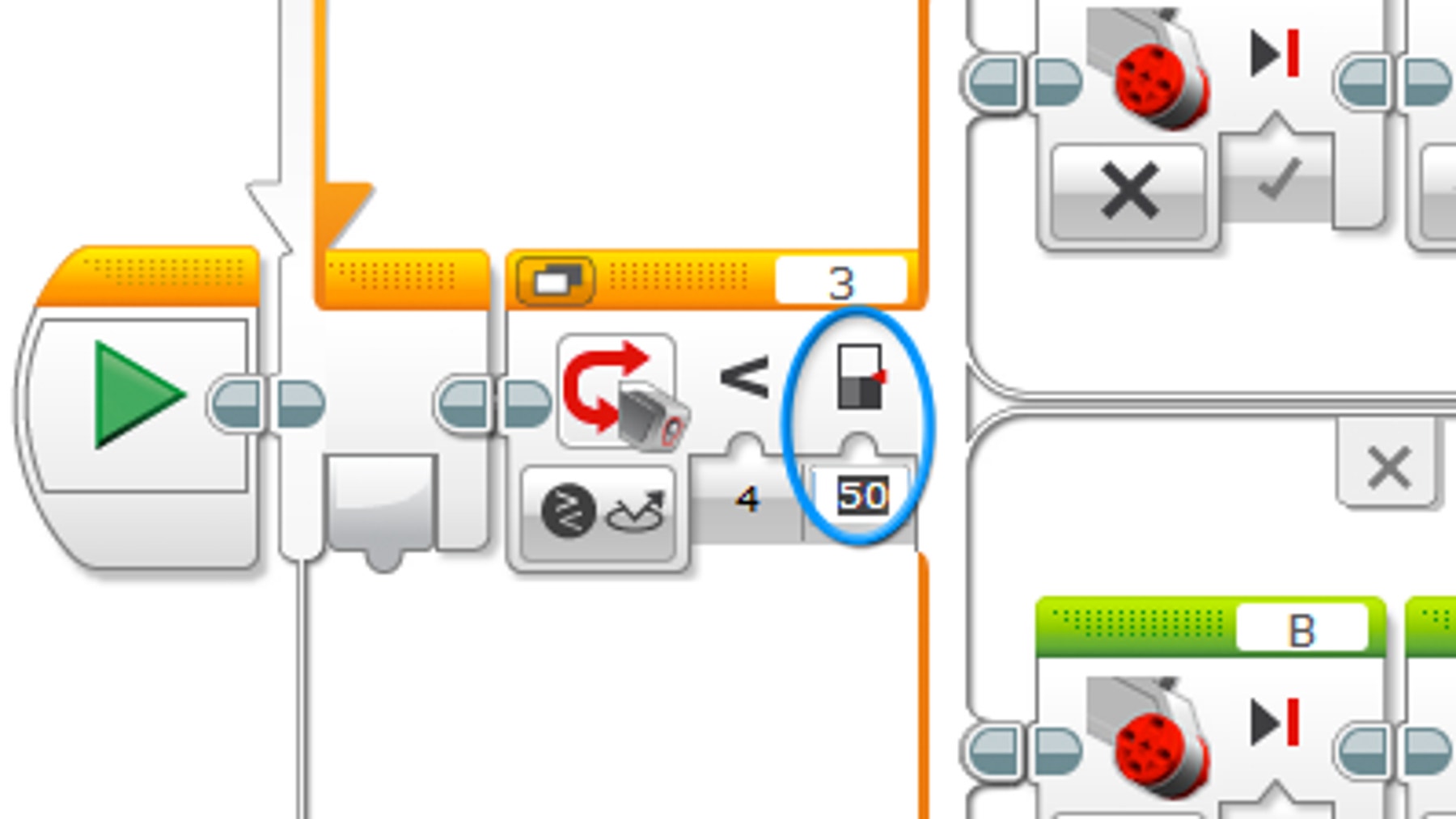
스위치 – 컬러 센서 – 반사광 강도
비교[보다 작음, 50]
참인 경우: 라지 모터 C – 꺼짐
참인 경우: 라지 모터 B – 켜짐
거짓인 경우: 라지 모터 B – 꺼짐
거짓인 경우: 라지 모터 C – 켜짐
경계값 설정
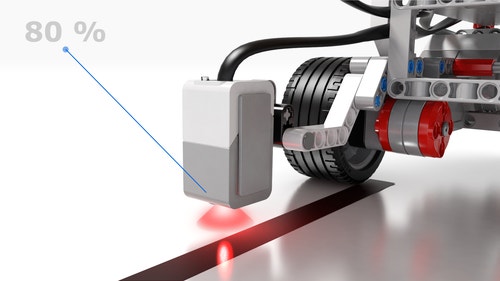
다음 페이지에서 컬러 센서의 밝은 빛과 어두운 빛의 광량을 측정한 다음 그 숫자를 사용하여 평균을 구하면, 이것이 컬러 센서의 광 감도에 대한 경계값이 됩니다.
우선, 컬러 센서를 어두운 선 위로 옮기세요.
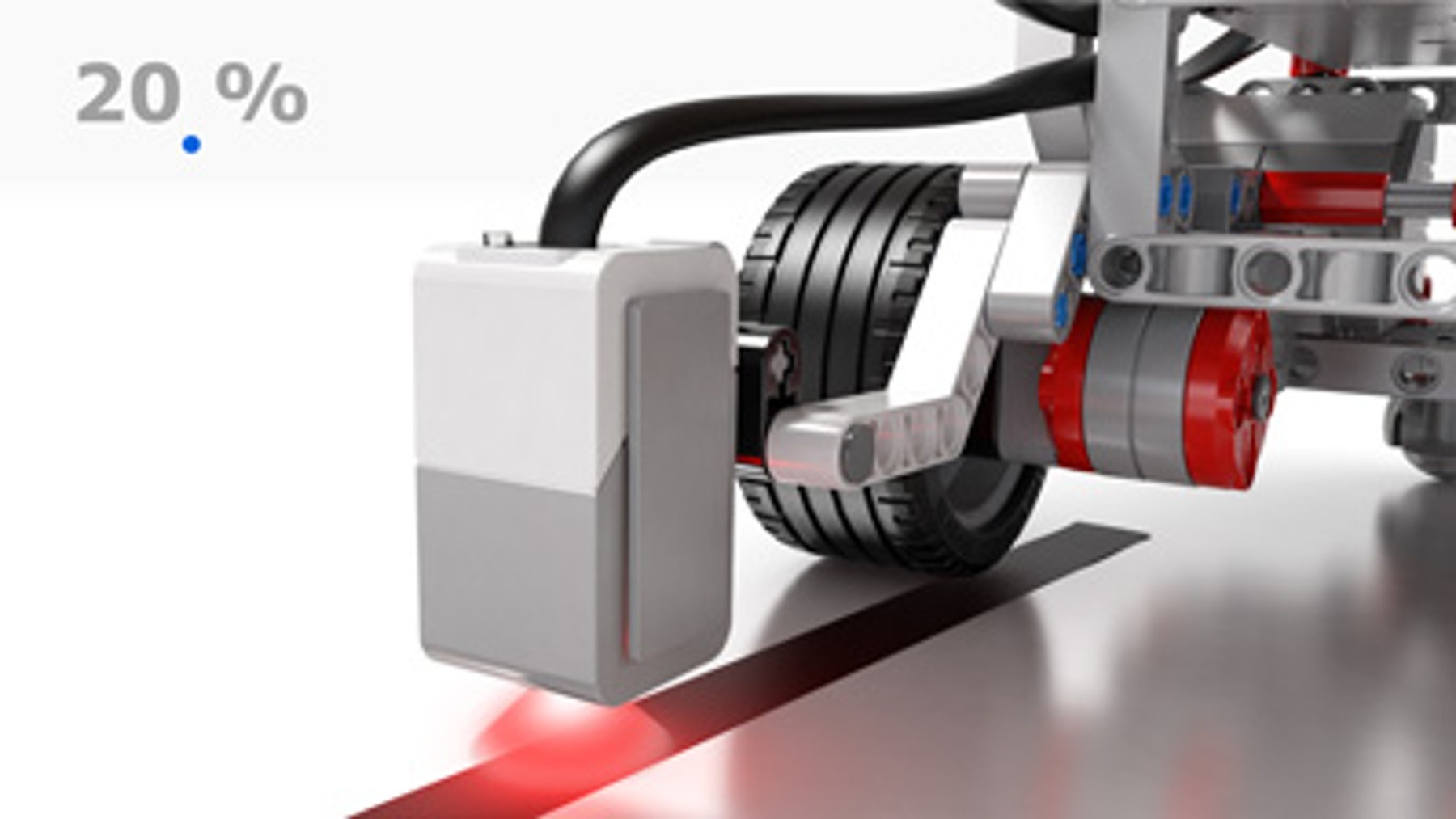
그런 다음, 하드웨어 페이지를 열고 포트 3에 표시된 값을 적으세요. 이 값이 최소값 (x)입니다.
이제 컬러 센서를 어두운 선 주변의 밝은 바닥으로 가져가세요.
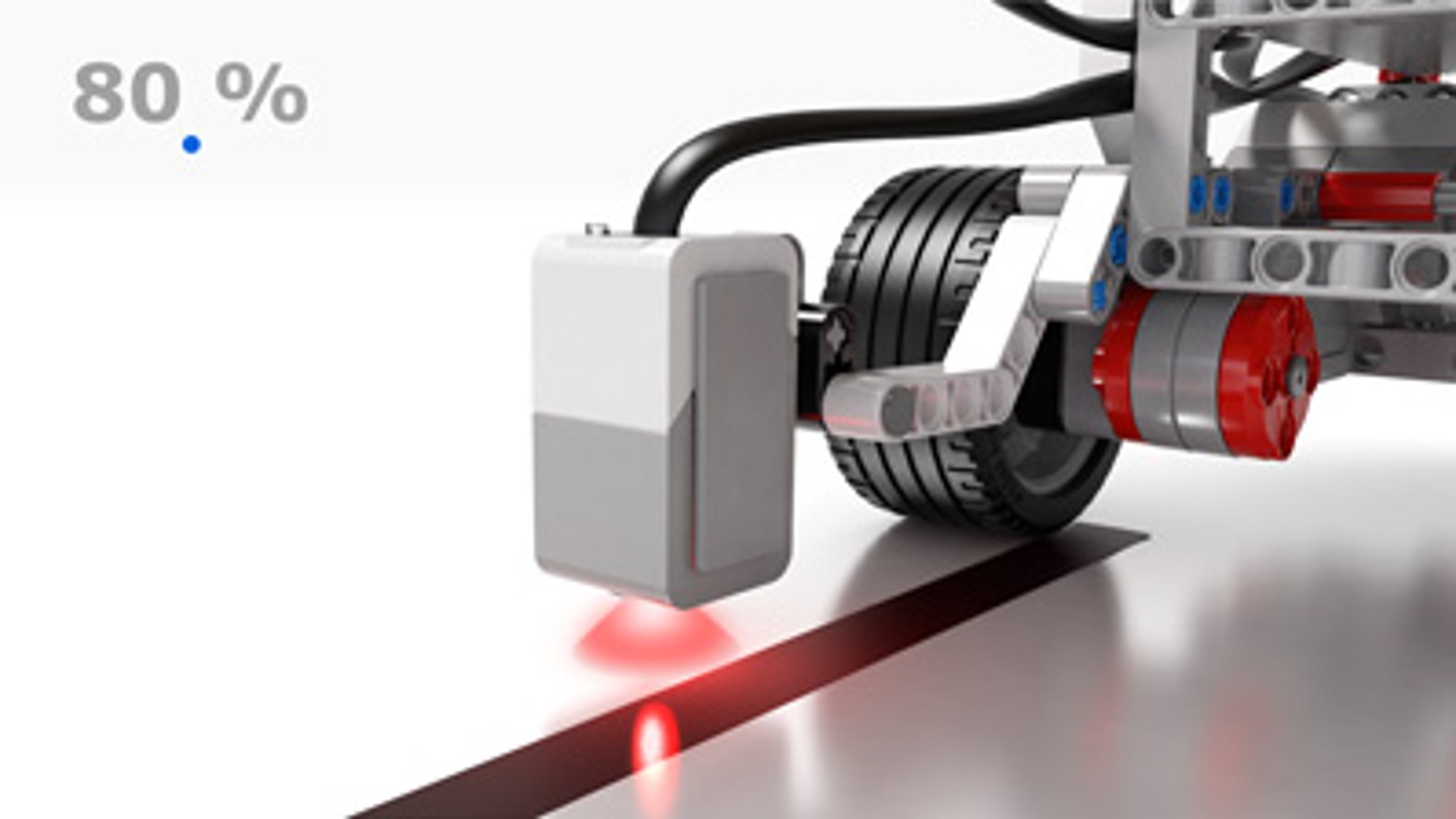
포트 3에 표시된 값을 적으세요. 이 값이 최대값 (y)입니다.
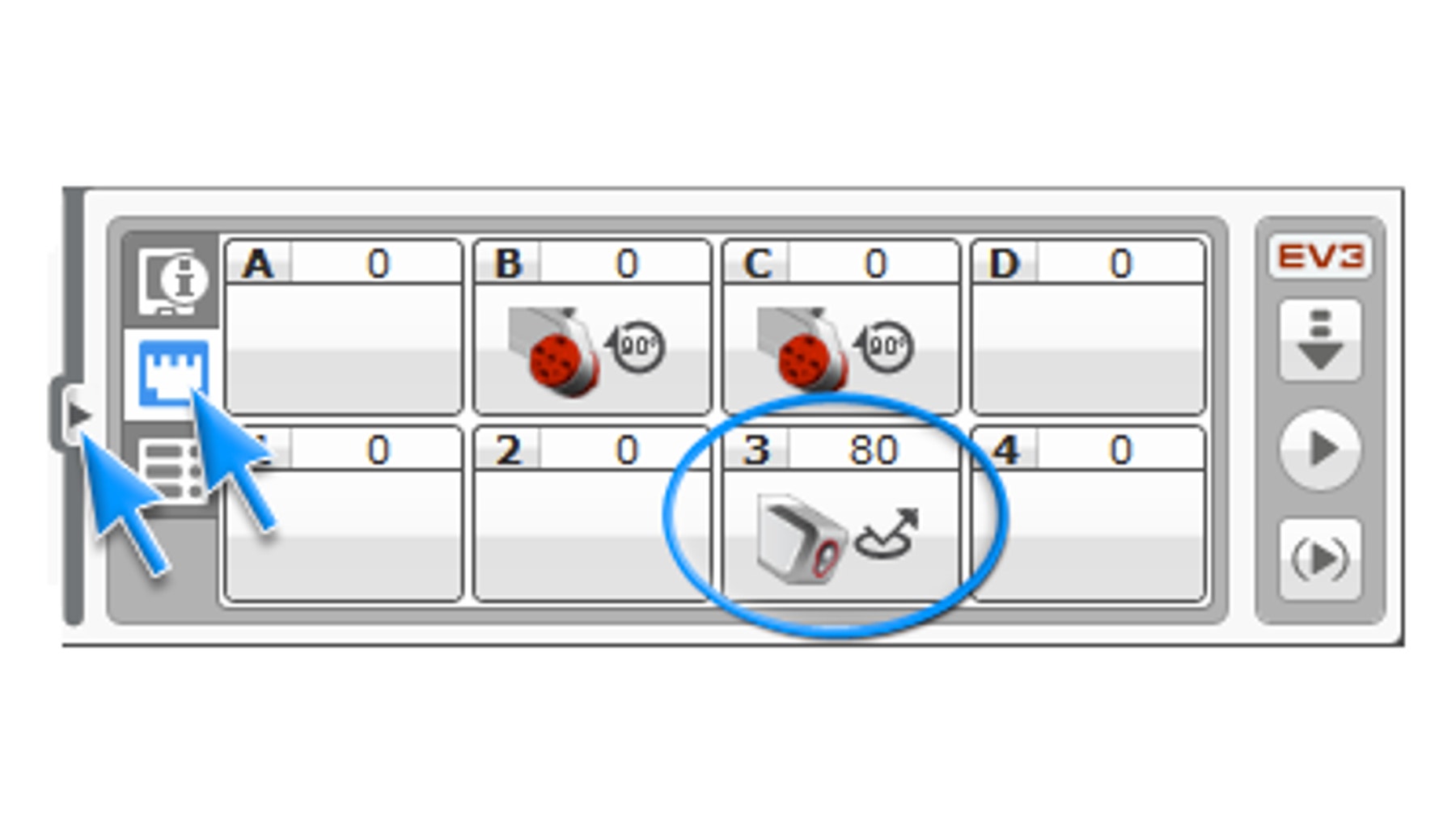
경계값을 설정하려면, (x+y)/2 수식을 계산하고 그 값을 스위치 블록에 입력하세요(이 값은 제시된 예와 다를 수 있습니다).
그런 다음, 프로그램을 다운로드하세요.
수정하기
이제 여러분 차례입니다! 밝은 색 라인을 따라갈 때 드라이빙 베이스가 작동하는지 테스트하세요! 그렇지 않으면, 경계값을 다시 설정해 보세요.
문제 해결
라인에서 반사되는 센서 빛이 특정 지점에 이르러 경계값을 초과하면 드라이빙 베이스가 원형으로 주행하게 됩니다. 이런 상황이 발생하면, 경계값을 변경하세요.
힌트
X 값과 Y 값의 차이가 너무 작으면, 라인이 감지되지 않습니다. 이 경우에는 센서를 재보정하세요(컬러 센서 - 보정 자습서의 도움말을 찾아보세요).
다음 차례는?





