Prøving og feiling
Hva er godt nok?
Ingen maskin er perfekt. Ingeniører gjør sitt beste for at de skal være så nøyaktige og presise som mulig, men det vil alltid være en viss grad av feil.
Hvilke faktorer bestemmer hvor mye feil som er akseptabelt?
Bygg denne *koniske roboten*.
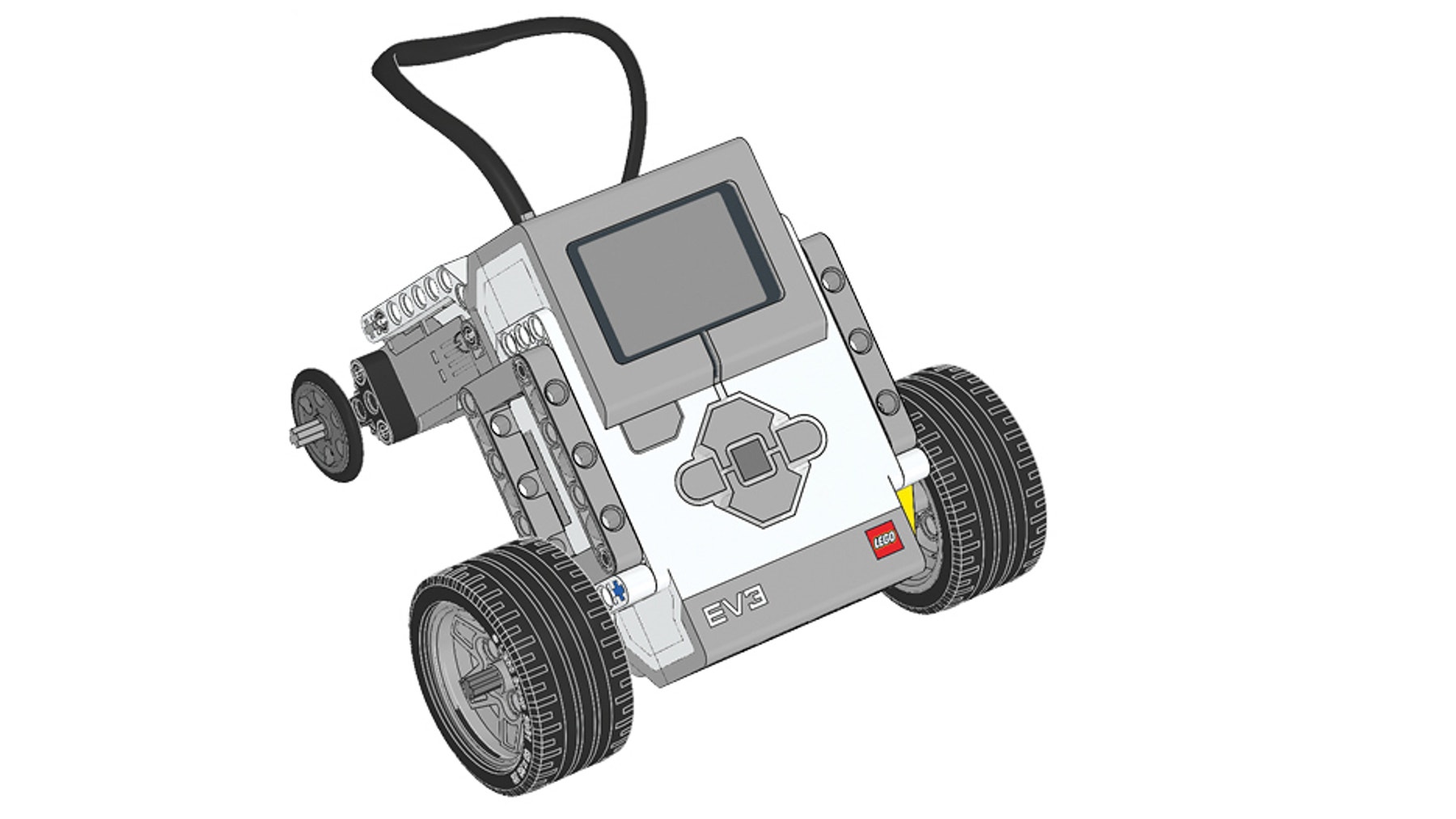
Den vil hjelpe deg med å undersøke hvilke deler av designet og programmet som kan forårsake unøyaktigheter.
Prøv programmet.


Plasser modellen på en solid og jevn overflate og merk av startposisjonen. Kjør programmet og merk av sluttposisjonen når programmet er ferdig.
Beveger den koniske roboten seg 100 cm? Vises de beregnede motorrotasjonene, de faktiske motorrotasjonene og den beregnede tilbakelagte distansen (i cm)?
Registrer resultatene dine.
Registrer eksperimentnummeret, beregnet tilbakelagt distanse og målt tilbakelagt distanse i en testtabell. Sørg for at det er nok plass til ytterligere kolonner for ytterligere beregninger.
Utfør eksperimentet ved bruk av standardmodellen og -programmet. Gjenta eksperimentet for hver justering du gjør for å bestemme effekten av justeringen.
Gjennomfør eksperimentet
Når du gjennomfører eksperimentet, må du huske på følgende:
- De beregnede motorrotasjonene, de faktiske motorrotasjonene og den beregnede tilbakelagte distansen (i cm) vises på displayet.
- Utfør eksperimentet minst tre ganger, og bruk gjennomsnittsverdiene for å sikre de mest pålitelige resultatene.
Oppsummer resultatene.
Bruk den gjennomsnittlige målte tilbakelagte distansen for hver av justeringene du gjorde, og beregn unøyaktigheten for å identifisere hvilken versjon som var mest nøyaktig.
Hvilke justeringer av robotdesignet og -programmet hadde størst innvirkning på nøyaktigheten?
Hvordan gikk det?
Hva fikk du til? Er det noe du kunne ha gjort bedre?
Heftig! Nå vet du hvordan du forbedrer nøyaktigheten til en robot. La oss gå videre til neste leksjon.