Fabrikkroboten
Selvstyrende roboter utfører flere oppgaver på LEGO^®^ fabrikken.


Én av oppgavene er å flytte esker mellom de ulike arbeidsstasjonene. De finner også den nærmeste ladestasjonen når batteriet blir lavt! De utfører oppgavene på en effektiv måte, uten å treffe vegger, mennesker eller andre roboter.
Tror du kjørebasen kan brukes til å utføre lignende oppgaver?
Ta denne utfordringen!
Utform og bygg utvidelser til kjørebasen og programmer den til å:
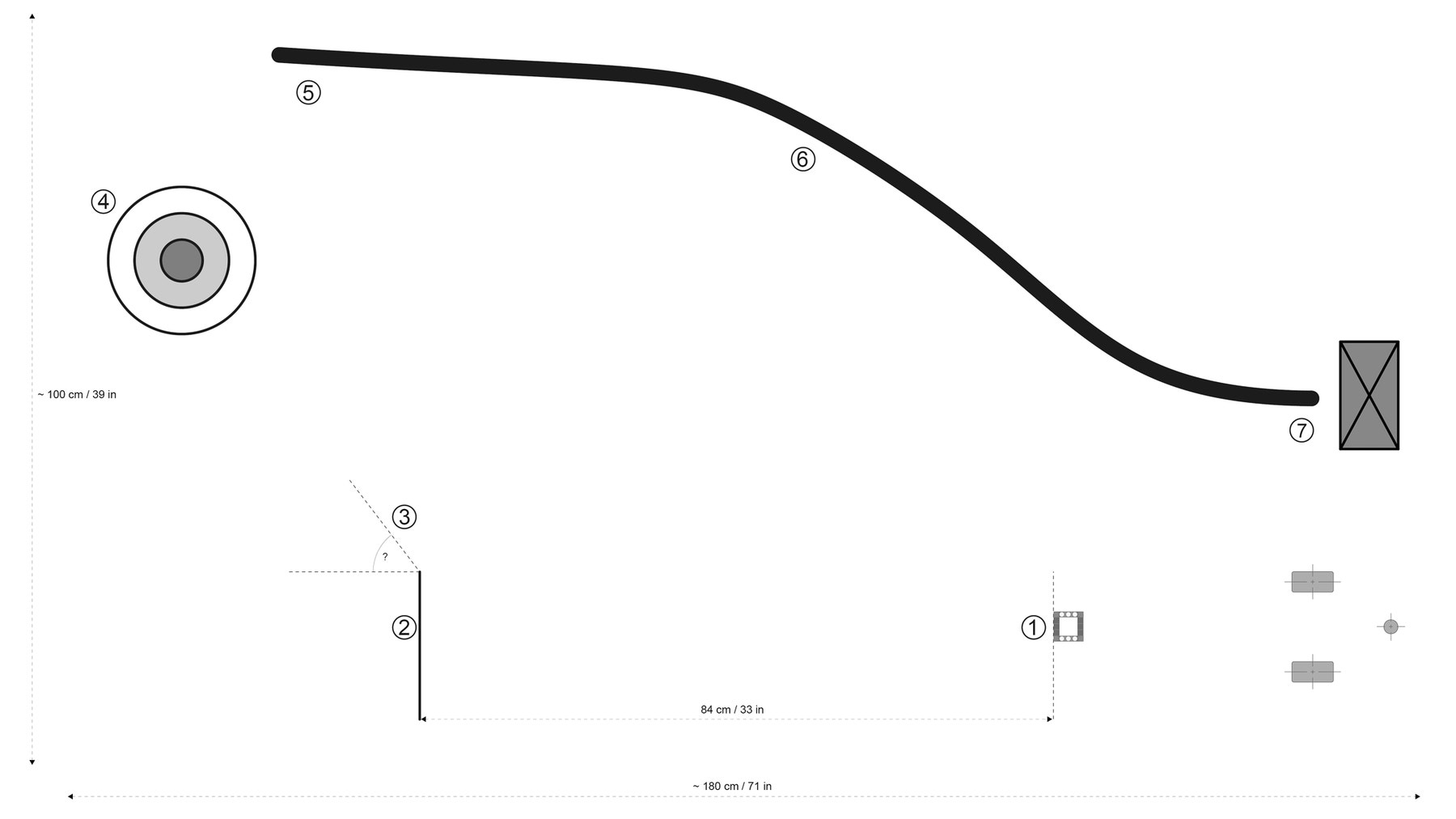
- gripe kuben og frakte den så nært som mulig til midten av dropp-sonen, og deretter slippe den.
- oppdage og følge linjen, lede den til ladestasjonen, og stoppe så nært som mulig til det store objektet uten å berøre det.
Lever pakken til dropp-sonen.

Utvikle ideer og arbeid på roboten til du er klar til å teste løsningen som skal gripe kuben og levere den til midten av dropp-sonen.
Tips til idémyldring
Du kan dele inn hovedaktiviteten i mindre underoppgaver, og tenke på spørsmål som:
- Hvordan kan roboten gripe tak i kuben?
- Hvordan kan roboten navigere til midten av dropp-sonen?
- Hvilke av utvidelsene fra de tidligere leksjonene er nyttig for denne oppgaven?
Følg linjen til ladestasjonen.
Utvikle ideer og arbeid på roboten til du er klar til å teste løsningen som skal følge linjen til ladestasjonen, og deretter stoppe rett foran det store objektet.
Tips til idémyldring
Du kan dele inn hovedaktiviteten i mindre underoppgaver, og tenke på spørsmål som:
- Hvordan kan roboten oppdage og følge linjen?
- Hvordan kan roboten slutte å følge linjen så nært som mulig til det store objektet?
- Hvilke av utvidelsene fra de tidligere leksjonene er nyttig for denne oppgaven?
Fullfør utfordringen.

Plasser roboten på startposisjonen og se om den:
- griper kuben og leverer den til midten av droppsonen
- følger linjen til ladestasjonen
Hvordan gikk det?
Hva fikk du til? Er det noe du kunne ha gjort bedre?
Heftig! Du har mestret kjørebasen, og den er nå klar til å brukes på fabrikken!