Sving ved bruk av sensor
Ditt oppdrag er å programmere roboten slik at den fullfører en sving i en nøyaktig vinkel, ved bruk av gyrosensoren.
Trinnvis
- Bygge roboten.
- Lag ditt program.
- Plasser roboten på posisjon 2 på matte 2, og kjør programmet.
- Dokumentere funnene.
- Fortsett å lære mer om hvordan du bruker gyrosensoren til å kontrollere robotens bevegelser.
Før du starter dette oppdraget kan du se gjennom disse Robot Educator-undervisningsoppleggene:
- Stopp ved bestemt vinkel
- Løkke
I løpet av dette oppdraget utforsker elevene forholdet mellom inndata fra sensor og robotens atferd. Kjørebaserotasjonene kontrolleres av gyrosensoren.
Observer elevene for å avgjøre om de
Bruker riktig terminologi,
Gjenkjenner funksjonen til programmeringsikonene,
Tester svingvinkelen til roboten nøyaktig og
Forstår hvilke faktorer som kan påvirke hvor nøyaktig selve stoppingen skjer ved bruk av gyrosensoren (sensortoleranse, motorslakk og rotasjonsmoment).
Innledning
(5 min.)
Rotating using a wheel is not very precise. If you try to turn your robot in the dust or on a slippery surface, it may not reach the right angle. What the Gyro Sensor does is to help you make much more precise movements.
Your mission is to program your robot to complete a point turn to an exact angle by using the Gyro Sensor.
Montering
(20 min.)
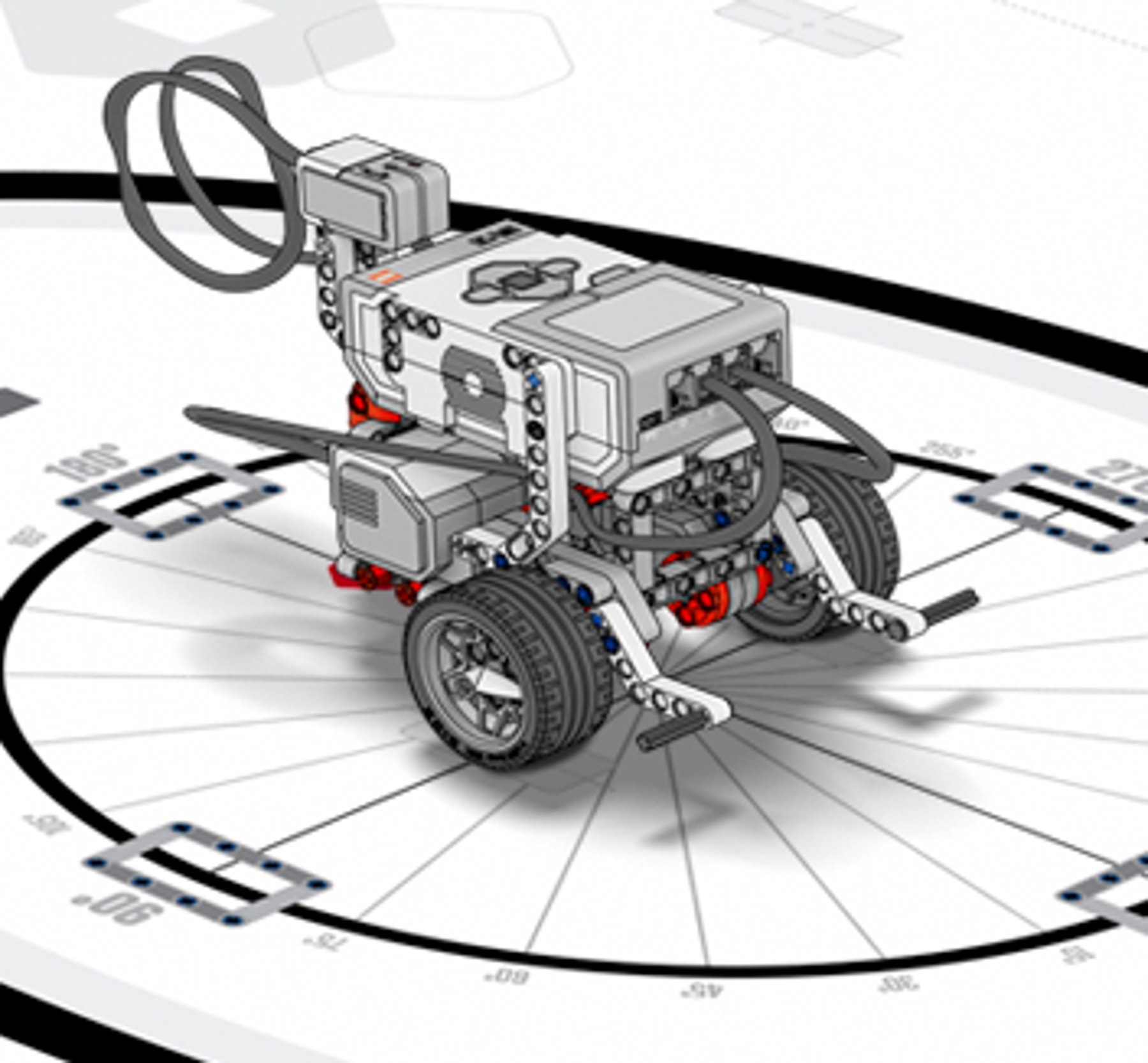
Bygge roboten
Klikk på lenkene nedenfor for å åpne byggeinstruksjonene, deretter bygger du modellene og returnerer til dette prosjektet for å fortsette. Hopp over dette trinnet hvis du har bygget modellen allerede.
VIKTIG:
Hold gyrosensoren og EV3-klossen støtt når du kobler til kabelen, og i løpet av oppstarten av EV3-klossen.
Lag ditt program
Lag programmet nedenfor på nytt og last det deretter ned til roboten.

Programsammendrag
Start
Kjør som tanks – Styrke B [10], Styrke C [-10]
Vent – Gyrosensor – Sammenlign – Vinkel - Type [3](større enn eller lik), Grader [90]
Kjør som tanks – Av
Feilsøking
Vinkelen må justeres – typisk skal verdien være mindre enn 90 grader.
Teori
Når du bruker gyrosensoren, stemmer rotasjonsverdien som er skrevet i sensorikonet overens med rotasjonen til kjørebasen. Nøyaktigheten til sensoren er +/- 3 grader.
Motorslakket og forsinkelsen som forårsakes av at rotasjonsmomentet stoppes, kan også påvirke nøyaktigheten.
Batterieffekten, størrelsen på hjulene, friksjonen til roboten på overflaten og avstanden mellom de to hjulene er ikke lenger faktorer som kan påvirke nøyaktigheten til robotens rotasjon.
Vurdering
(20 min.)
Kjør programmet og observer.
Plasser roboten på startposisjon 2 på matte 2, og kjør programmet.
Dokumentere funnene
- Her kan du beskrive hva hvert programmeringsikon utførte:
Min robot svingte helt til gyrosensoren leste verdien 90 grader, deretter stoppet roboten. - Anslå robotens rotasjonsvinkel:
Min robot svingte omtrent 90 grader. - Forklar forskjellen mellom rotasjonen til roboten med og uten gyrosensoren:
Rotasjonen som kontrolleres av gyrosensoren, er knyttet til færre usikkerhetsfaktorer som kan påvirke roboten din.
Vurdere og endre
Lag programmet på nytt for å få roboten til å gjøre følgende svingpunkter:
- Svinge 45 grader med klokken
- Svinge 180 grader med klokken
- 360 grader med klokken, etterfulgt av en sving mot klokken i 360 grader
Hvor mye roterte roboten, sammenlignet med hva programmet kommuniserte til roboten?
Roboten roterte som regel mer, på grunn av rotasjonsmomentet.
Oppgave
Sving roboten med klokken i 45 grader.

Løsning - Programsammendrag
Start
Kjør som tanks – Styrke B [10], Styrke C [-10]
Vent – Gyrosensor – Sammenlign – Vinkel – Type [3] (større enn eller lik), Grader [45]
Kjør som tanks – Av
Feilsøking
Vinkelen må justeres – vinkelen må som regel reduseres til mindre enn 45 grader.
Oppgave
Sving roboten med klokken i 180 grader.

Løsning - Programsammendrag
Start
Kjør som tanks – Styrke B [10], Styrke C [-10]
Vent – Gyrosensor – Sammenlign – Vinkel – Skriv [3] (større enn eller lik), Grader [180]
Kjør som tanks – Av
Feilsøking
Vinkelen må justeres – typisk skal verdien være mindre enn 180 grader.
Oppgave
Sving roboten med klokken i 360 grader, etterfulgt av en sving mot klokken i 360 grader.

Løsning - Programsammendrag
Start
Kjør som tanks – Styrke B [10], Styrke C [-10]
Vent – Gyrosensor – Sammenlign – Vinkel - Type [3](større enn eller lik), Grader [360]
Kjør som tanks – Av
Vent – Sekunder [2]
Kjør som tanks – Styrke B [10], Styrke C [-10]
Vent – Gyrosensor – Sammenlign – Vinkel – Type [5] (mindre enn eller lik), Grader [0]
Kjør som tanks – Av
Videreutvikling
(15 min.)
Fortsette å utforske
Lag et nytt program ved bruk av en løkke, for å få roboten til å kjøre i en kvadratisk formasjon.
Når dere er klar, kan dere teste programmet på startposisjon 4 på læringsmatte 1.

Løsning - Programsammendrag
Start
Løkke – Telling [4]
Kjør med styring – Grader [682], Styrke [30]
Vent – Tid [1 s]
Kjør som tanks – På, Styrke B [10], Styrke C [-10]
Vent – Gyrosensor – Endre vinkel – Retning [0] (øke), Grader [85]
Kjør som tanks – Av
Vent – Tid [1 s]
Feilsøking
Vinkelen må justeres – typisk skal verdien være mindre enn 90 grader.
Her kan dere forklare hva en løkke kan brukes til:
Jeg kan bruke løkkestrukturen til å gjenta handlinger.
Valgfritt
1.Lag et nytt program som får roboten til å kjøre i en trekantformasjon. Når dere er klar, kan dere teste programmet på startposisjon 4 på matte 1.
2.Programmer roboten til å kjøre i andre formasjoner.
Dere kan nå bruke gyrosensoren til å utføre svinger. Godt utført!
Lærerstøtte
Læringsmål:
Naturfag og ingeniørarbeid
• mønstre
• Årsak og virkning Mekanisme og forklaring
Matematikk:
• løse realistiske og matematiske problemer med måling av vinkler, areal, overflate og volum
• se etter og uttrykke regelmessigheter i gjentatte argumenter
Lære robotteknologi:
• kontrollere robotens bevegelser ved bruk av gyrosensoren
• forstå forskjellen mellom vanlig programmering av utdata og sensorbasert programmering
• fordeler og begrensninger med sensorer
LEGO® MINDSTORMS® EV3 Grundset
EV3 Lab eller EV3 Programmering
EV3 Verdensromutfordring-settet