Bryter
Bruk Bryter-ikonet til å utføre sensorbaserte avgjørelser.
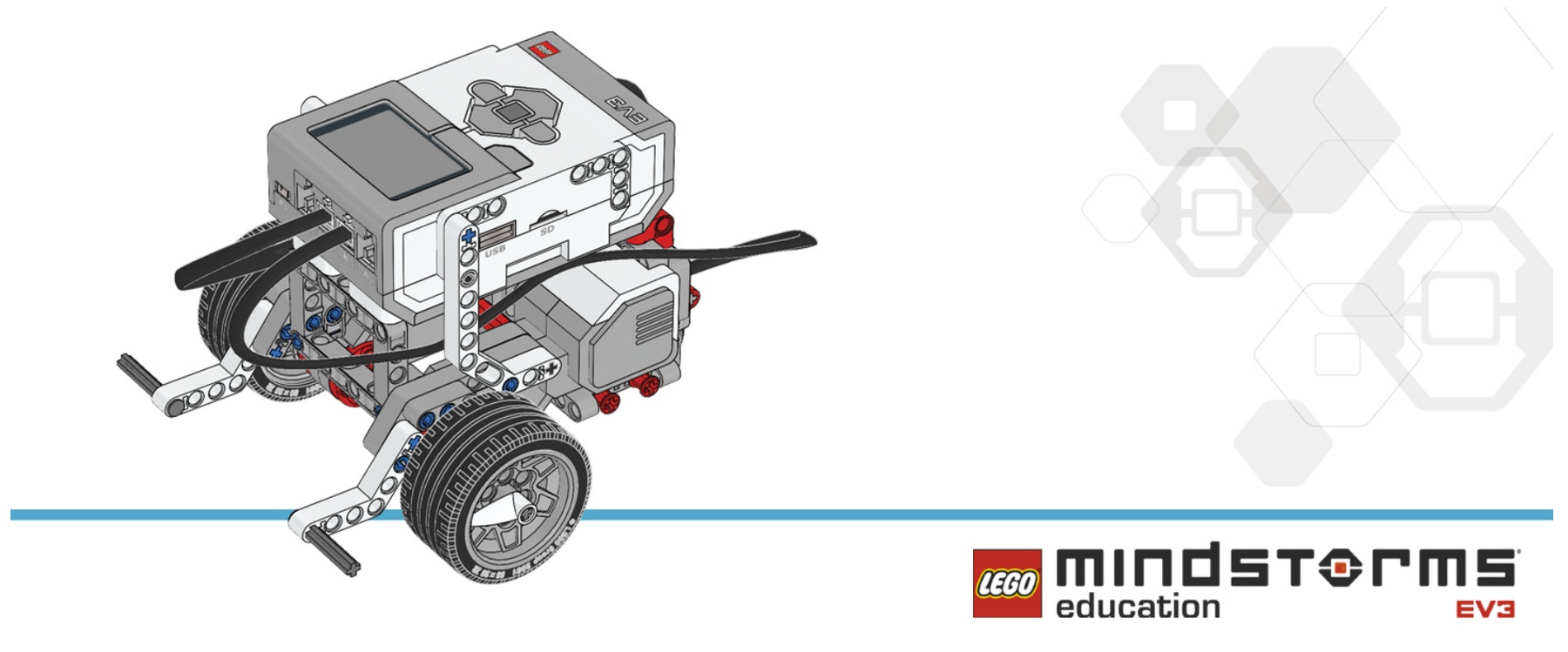
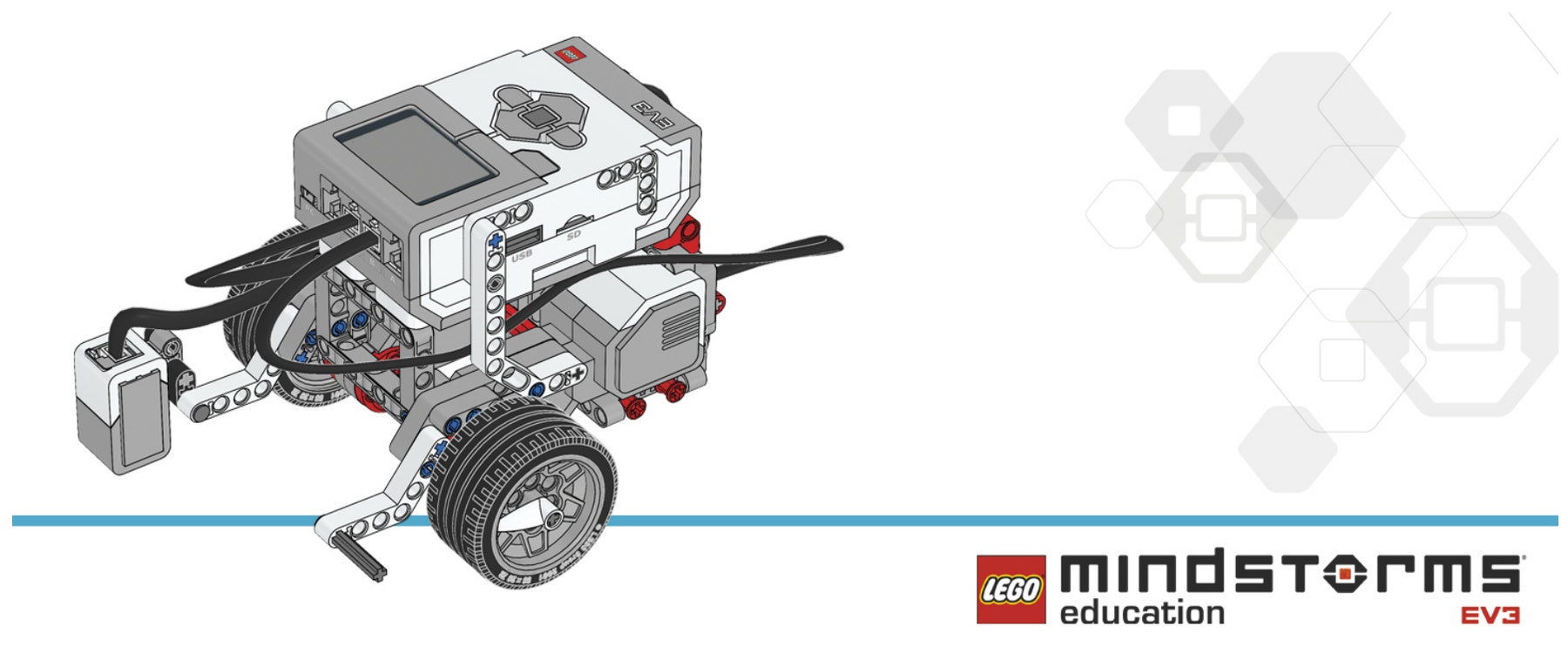
Bygg den
Bygg kjørebase-modellen og Fargesensor ned-modulen.
Test den
Bygg programmet på nytt og last ned og kjør deretter testen. Følger ikke kjørebasen linjen?
Hint
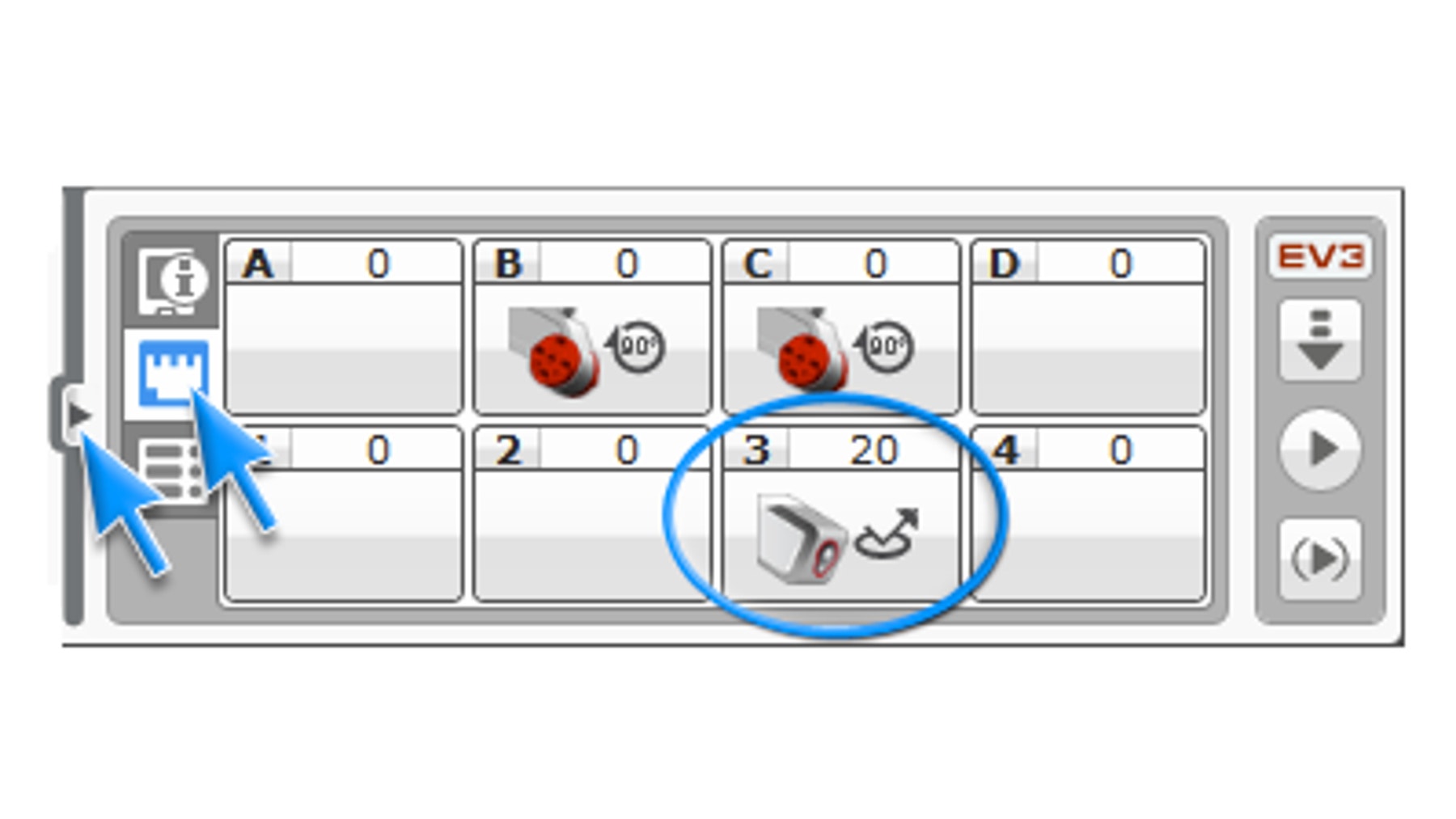
Portvisningsprogrammet på EV3-klossen kan også brukes til å vise sensoravlesninger i sanntid.
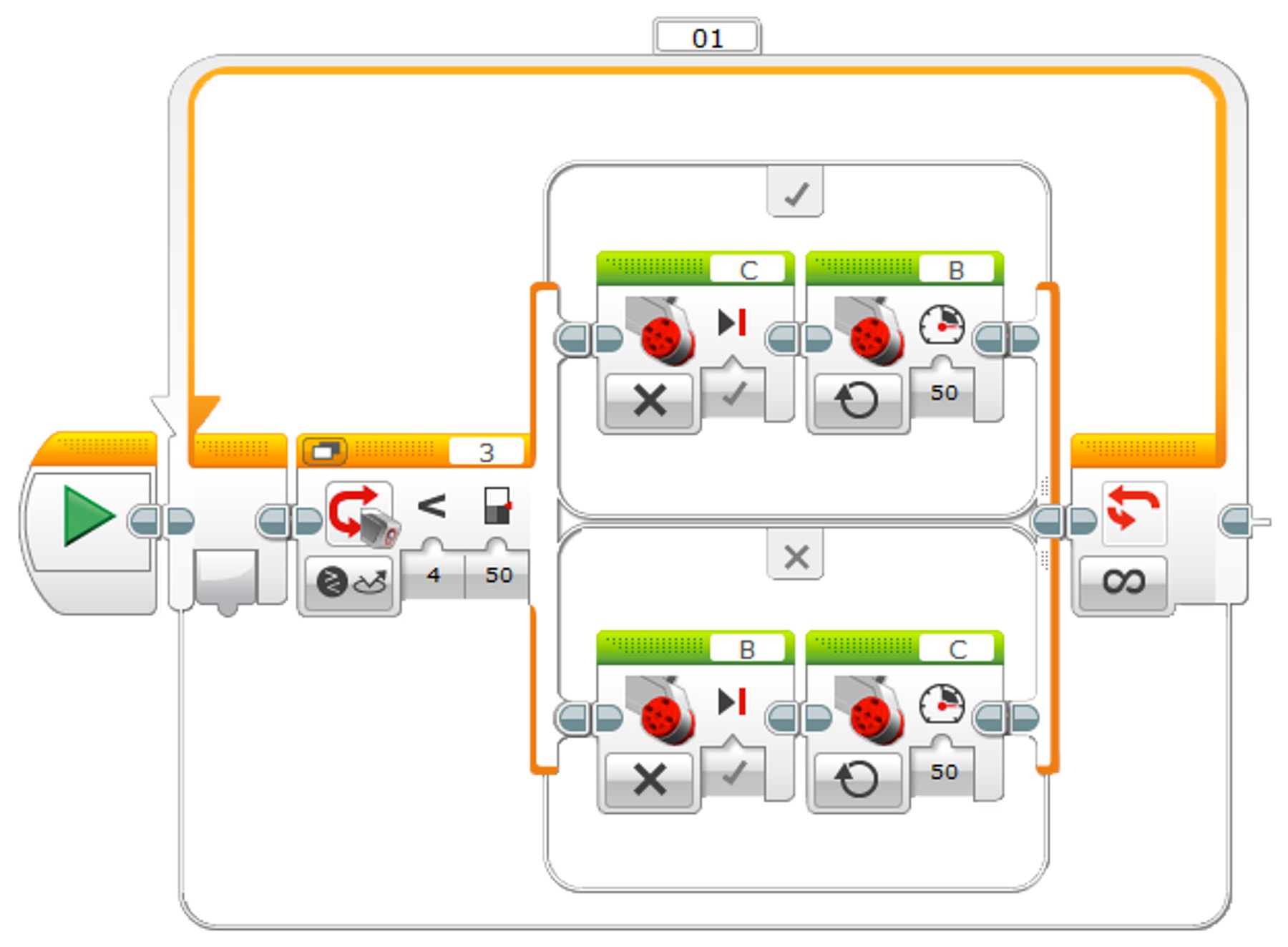
Programsammendrag
Start
Løkke – Ubegrenset
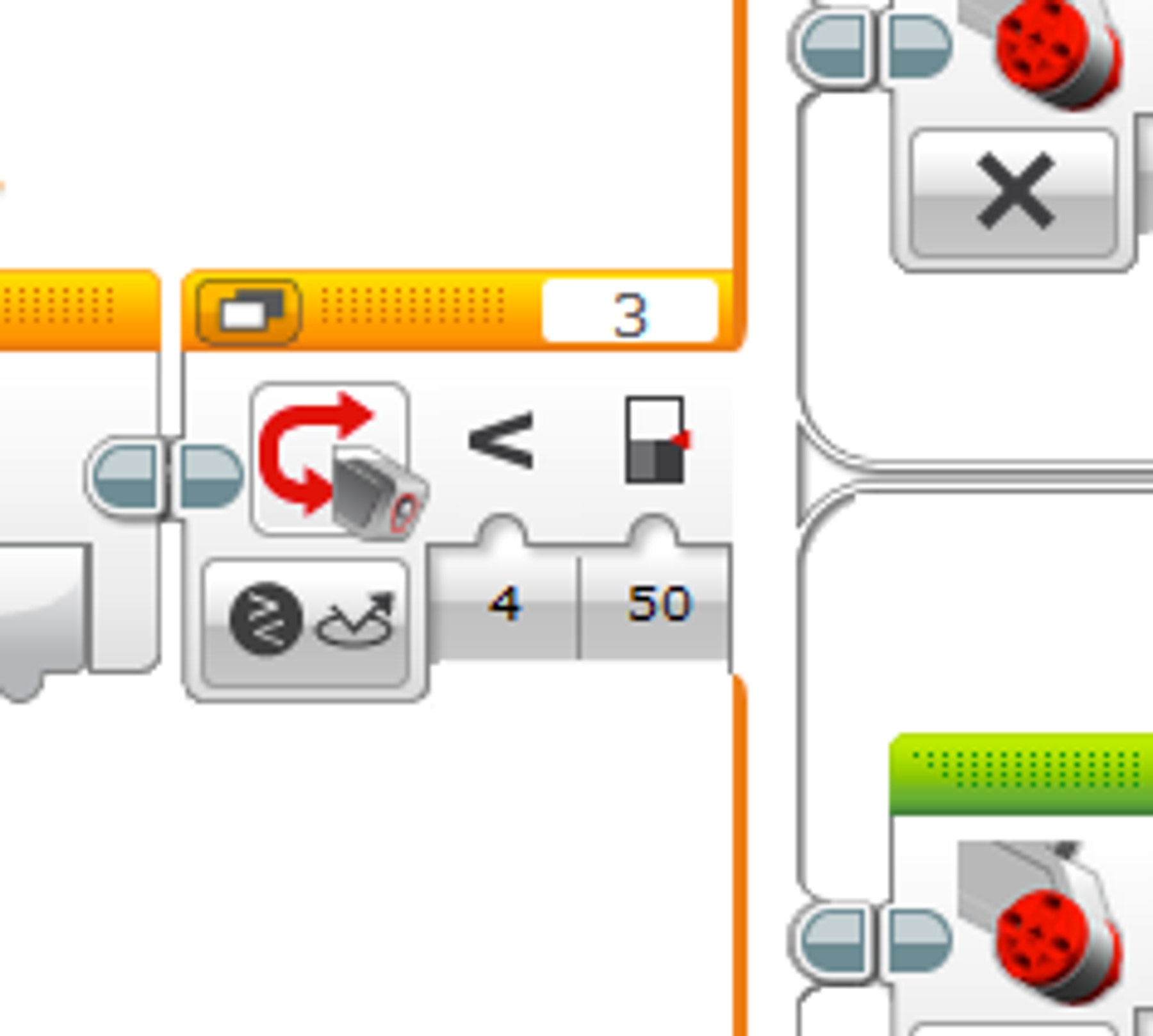
Forgrening – Fargesensor – Sammenlign – Reflektert
lysintensitet [mindre enn, 50]
Hvis Sann: Stor motor C – Av
Hvis Sann: Stor motor B – På
Hvis Usann: Stor motor B – Av
Hvis Usann: Stor motor C – På
Angi en terskel
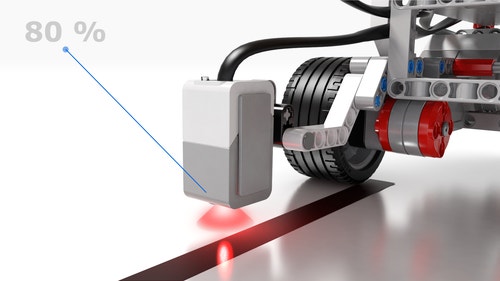
På de følgende sidene kommer du til å måle de lyse og mørke lysnivåene fra fargesensoren, og deretter bruke disse numrene til å finne gjennomsnittet. Gjennomsnittet blir da terskelen til fargesensorens følsomhet mot lys.
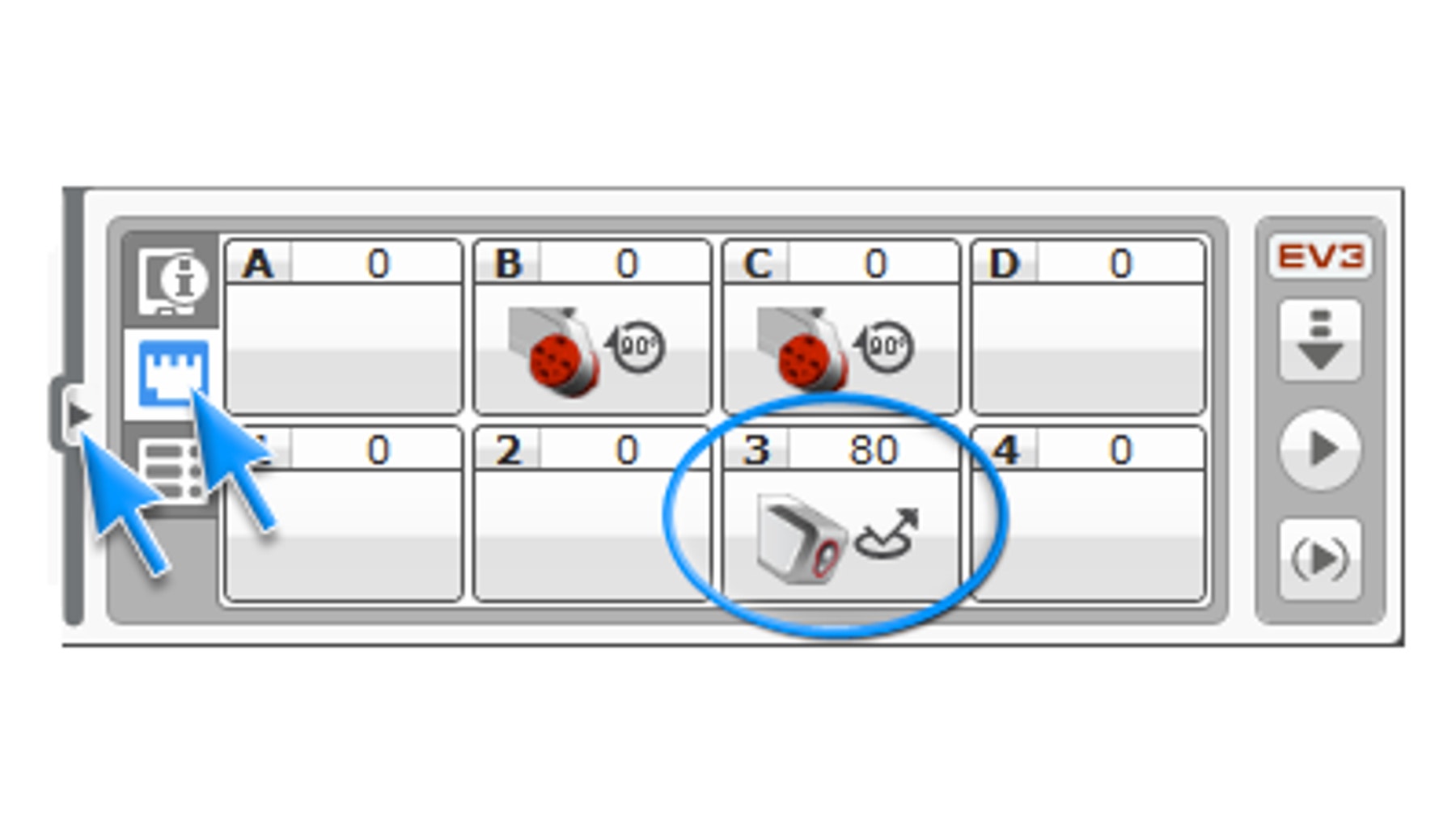
Flytt nå fargesensoren over den mørke linjen.
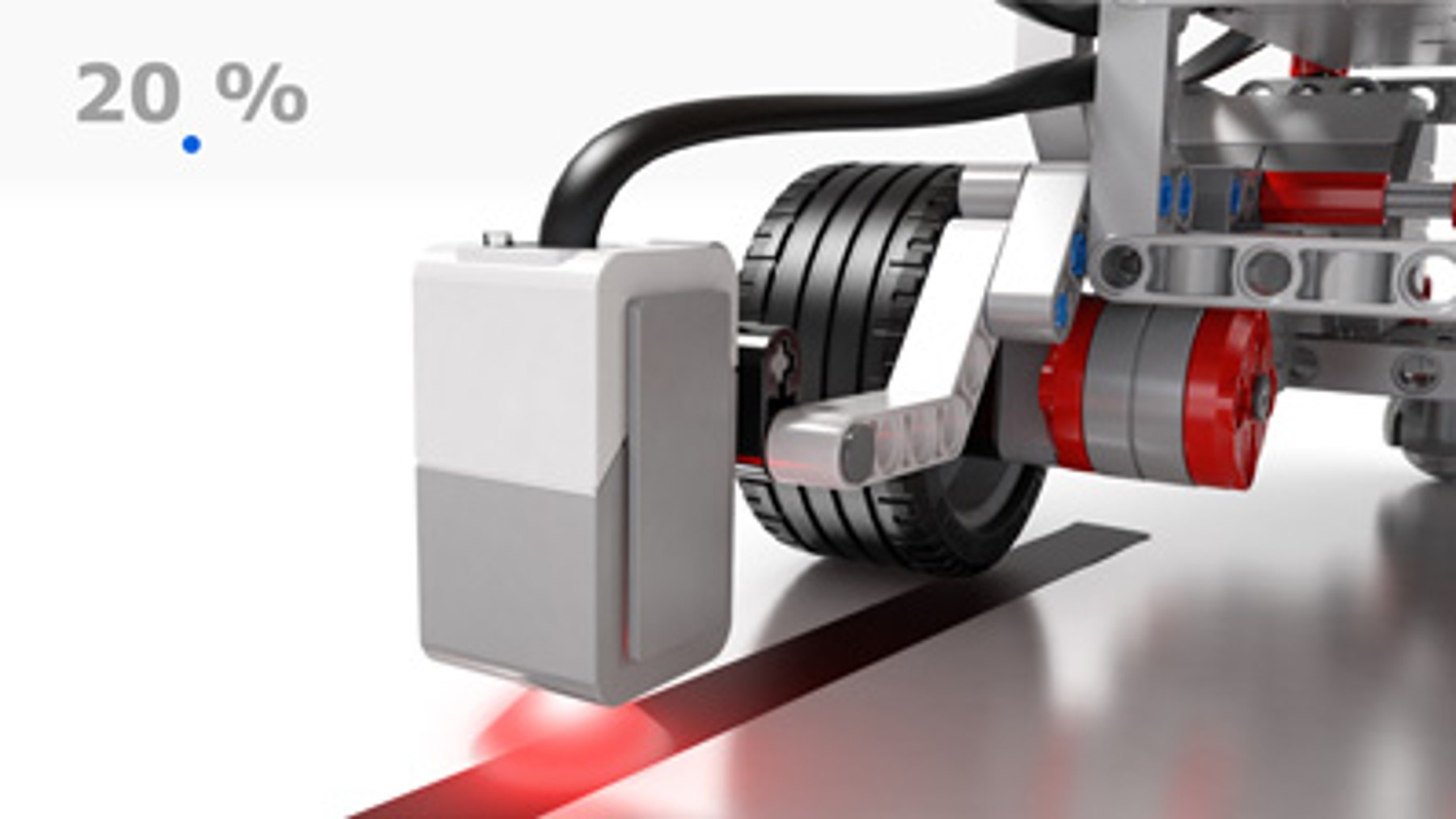
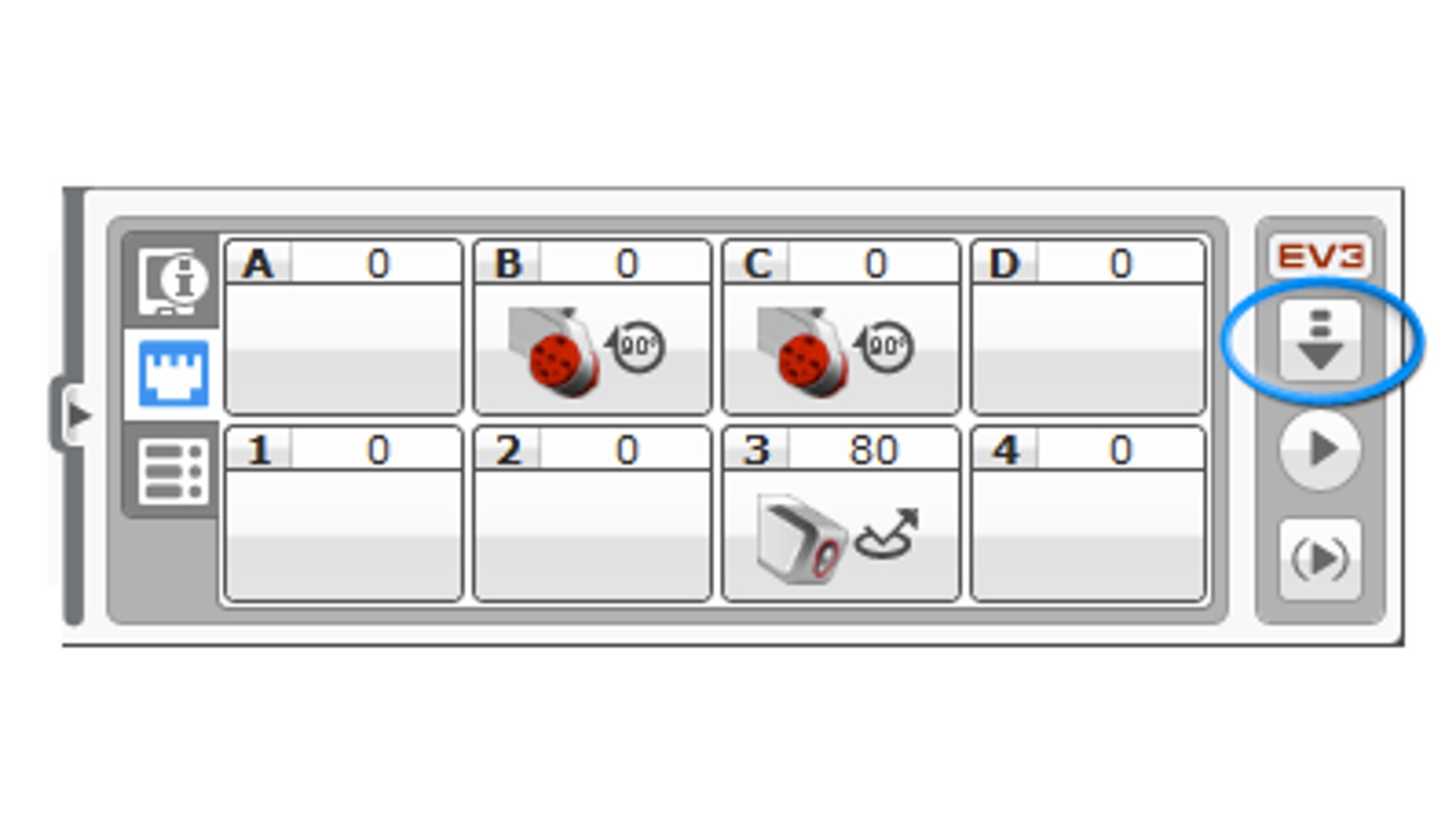
Deretter åpner du maskinvaresiden og skriver ned verdien som vises for port 3. Dette er minimumsverdien (x).
Flytt nå fargesensoren vekk fra den mørke linjen.
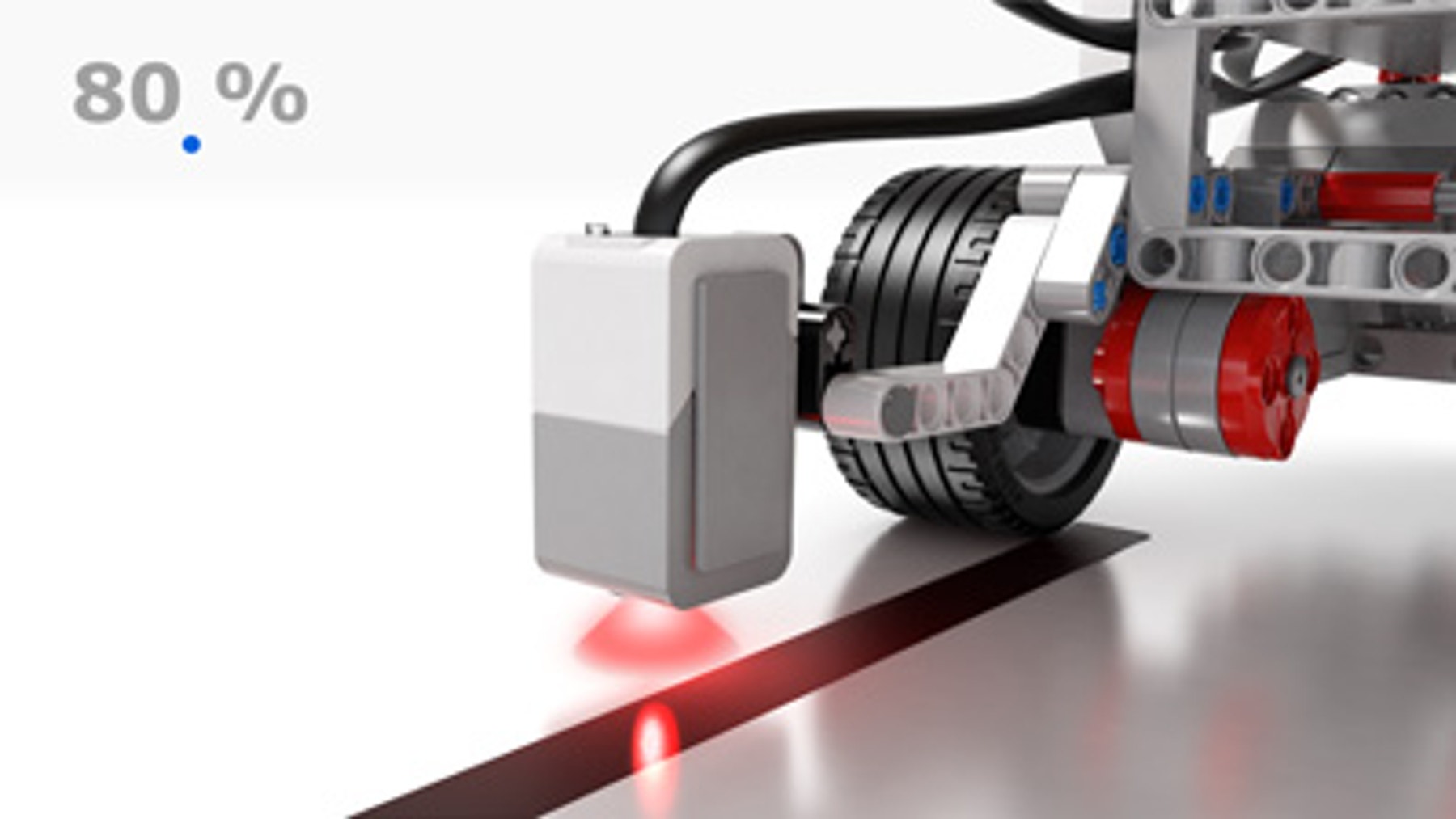
Skriv ned verdien som vises for port 3. Dette er maksimumsverdien (y).
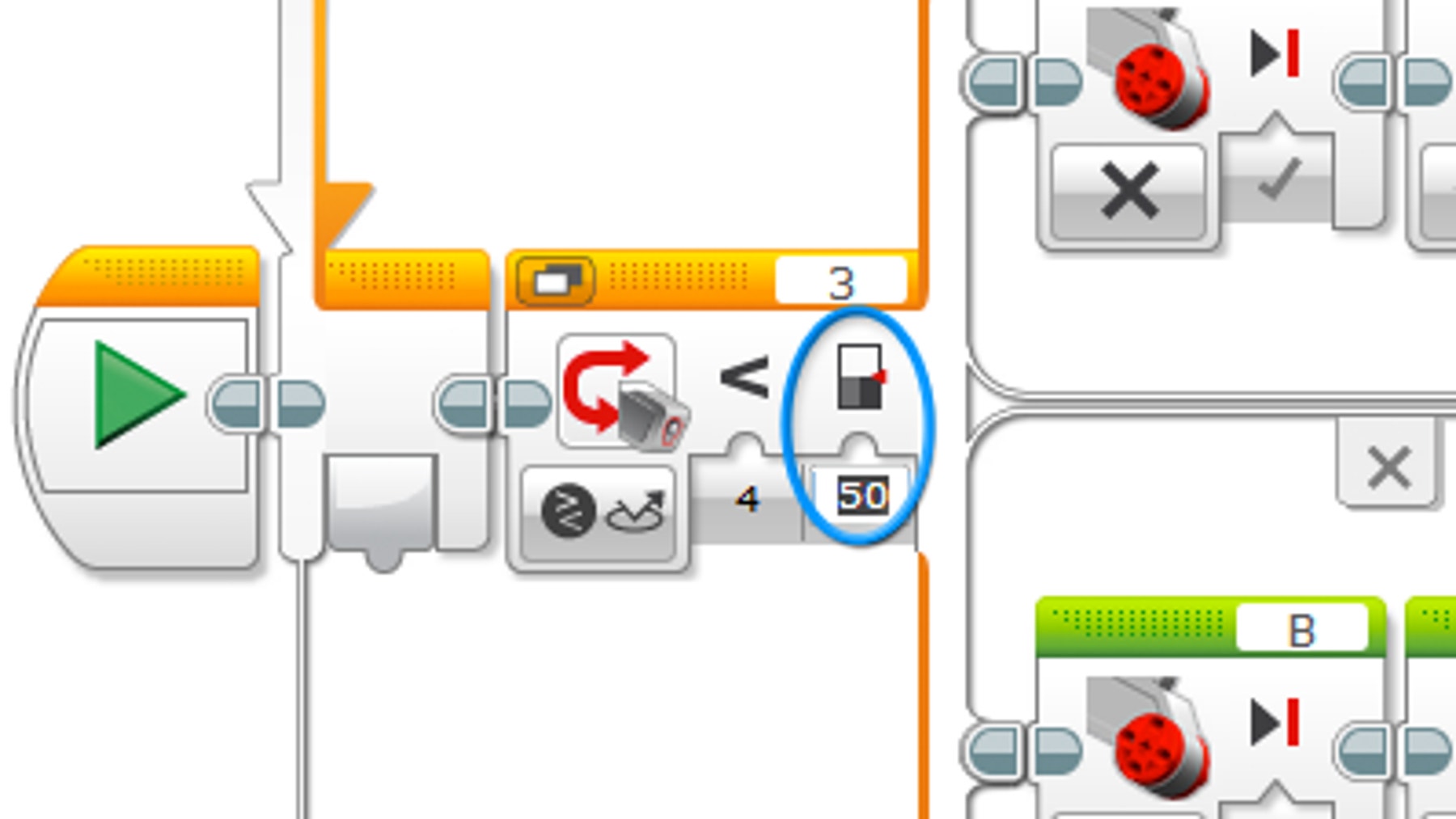
Slik angir du nå terskelen: beregn ligningen (x+y)/2 og skriv inn resultat i Forgrenings-ikonet (verdien kan være ulik den som vises i dette eksemplet).
Last deretter ned programmet.
Endre den
Nå er det din tur! Test om kjørebasen fungerer når den følger linje med en lysere farge. Hvis ikke, kan du prøve å angi terskelen på nytt.
Feilsøking
Noen ganger vil sensorlyset som reflekteres fra linjen overskride terskelen, som forårsaker at kjørebasen kjører i en sirkel. Hvis dette skjer, endrer du terskelverdien.
Hint
Hvis forskjellene mellom X-akse og Y-akseverdiene er for små, blir ikke linjen registrert. Hvis dette skjer, kan du prøve å kalibrere sensoren på.
Hva er neste trinn?

Lærerstøtte
Elevene kommer til å:
Bruk Bryter-ikonet til å utføre sensorbaserte avgjørelser.
LEGO® MINDSTORMS® EV3 Grundset
EV3 Lab eller EV3 Programmering