Milos bevegelsessensor
Key Objectives
I dette prosjektet skal du:
• Lage og programmere Milos objektdetektorarm ved bruk av en bevegelsessensorinngang.
• Dokumentere hvordan Milo fant den bestemte plantearten.

Utforske-fasen
Max og Mia vil at Milo skal ha en sensor for å registrere objekter.

Skape-fasen
Bruk klossene:
Lag en objektdetektorarm for å hjelpe forskningsroboten Milo med å stoppe ved plantearten.
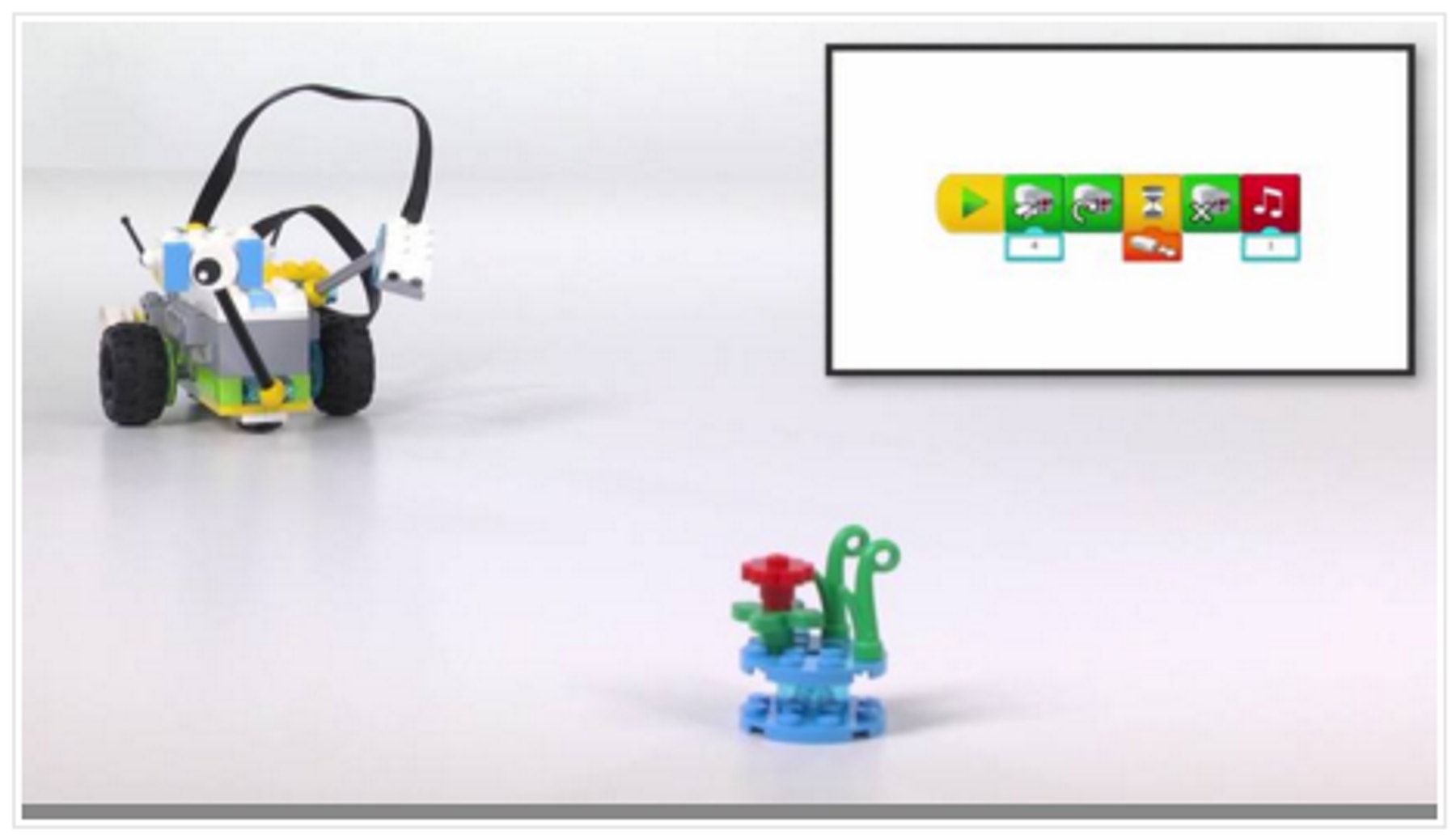

Slå på Smarthub og koble den til enheten din. Se videoen hvis du trenger hjelp.
Se i Hjelp-panelet hvis du trenger mer veiledning.
Programmer Milo til å stoppe foran plantearten når den blir registrert.

Dele-fasen
Film Milo når roboten griper etter plantearten.
Dokumenter Milos oppdagelsesoppdrag.
