Trial and error
Wat is goed genoeg?
Geen enkele machine is perfect. Ingenieurs doen hun uiterste best om elke machine zo precies en nauwkeurig mogelijk te maken, maar er zullen altijd afwijkingen zijn.
Op basis van welke factoren wordt de toegestane afwijking van de machine bepaald?
Bouw deze *gekantelde robot*.
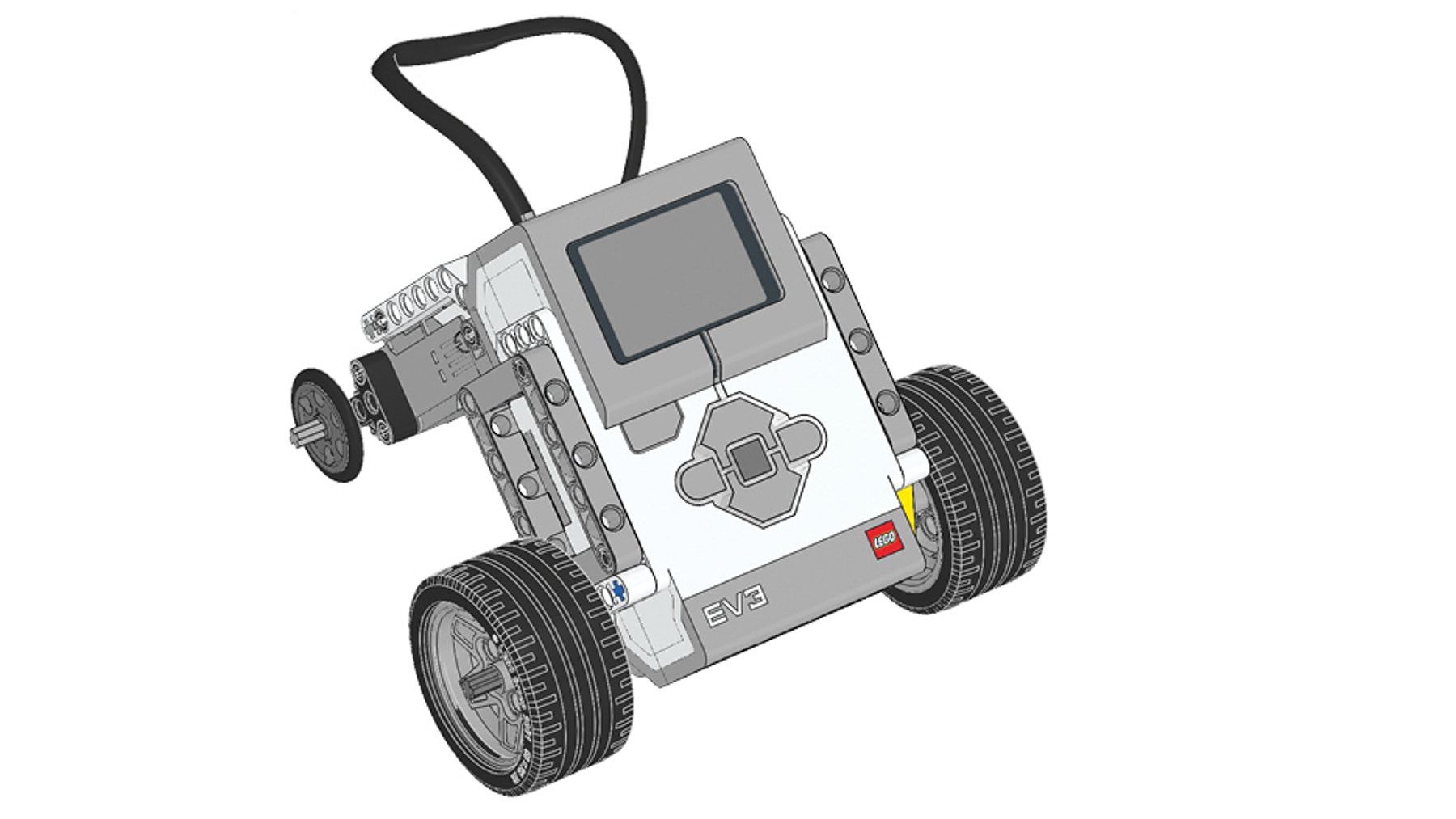
Hiermee kun je namelijk makkelijker uitzoeken welke aspecten in het ontwerp en programma van de robot voor onnauwkeurigheden zorgen.
Test hem.


Plaats het model op een stabiele en vlakke ondergrond en markeer de startpositie. Voer het programma uit en markeer de eindpositie zodra het model niet meer beweegt.
Heeft de gekantelde robot zich 100 cm verplaatst? Worden de berekende motorrotaties, de daadwerkelijke motorrotaties en de berekende afgelegde afstand (in cm) weergegeven?
Je resultaten noteren.
Noteer in een tabel het experimentnummer, de berekende afgelegde afstand en de gemeten afgelegde afstand. Zorg ervoor dat er voldoende ruimte overblijft voor extra kolommen om berekeningen in te noteren.
Voer het experiment uit aan de hand van het standaardmodel en -programma. Voer het experiment na iedere aanpassing opnieuw uit om te zien welk effect de aanpassing heeft.
Het experiment uitvoeren
Houd tijdens het uitvoeren van je experiment rekening met het volgende:
- De berekende motorrotaties, de daadwerkelijke motorrotaties en de berekende afgelegde afstand (in cm) worden op het beeldscherm weergegeven.
- Voer het experiment minstens drie keer uit en gebruik de gemiddelde waardes om tot het meest betrouwbare resultaat te komen.
Geef een samenvatting van je resultaten.
Gebruik het gemiddelde van alle afgelegde afstanden die je na iedere aanpassing hebt gemeten en bereken de afwijking om te bepalen welke versie het nauwkeurigst was.
Welke aanpassingen aan het ontwerp en programma van de robot hebben de meeste invloed gehad op de nauwkeurigheid?
Hoe heb je het gedaan?
Wat heb je goed gedaan? Is er iets wat je beter had kunnen doen?
Geweldig! Nu weet je hoe je de nauwkeurigheid van een robot kunt verbeteren. Op naar de volgende les.