Vastpakken en loslaten
Hiervoor hebben we gemotoriseerde tools nodig.
Gemotoriseerde tools kunnen aan de robots worden vastgemaakt zodat de robots verschillende taken kunnen uitvoeren. Tijd om op zoek te gaan naar de meest geschikte tool voor deze taak!
Welke gemotoriseerde tools heeft jouw rijbasis nodig om objecten te kunnen verplaatsen?
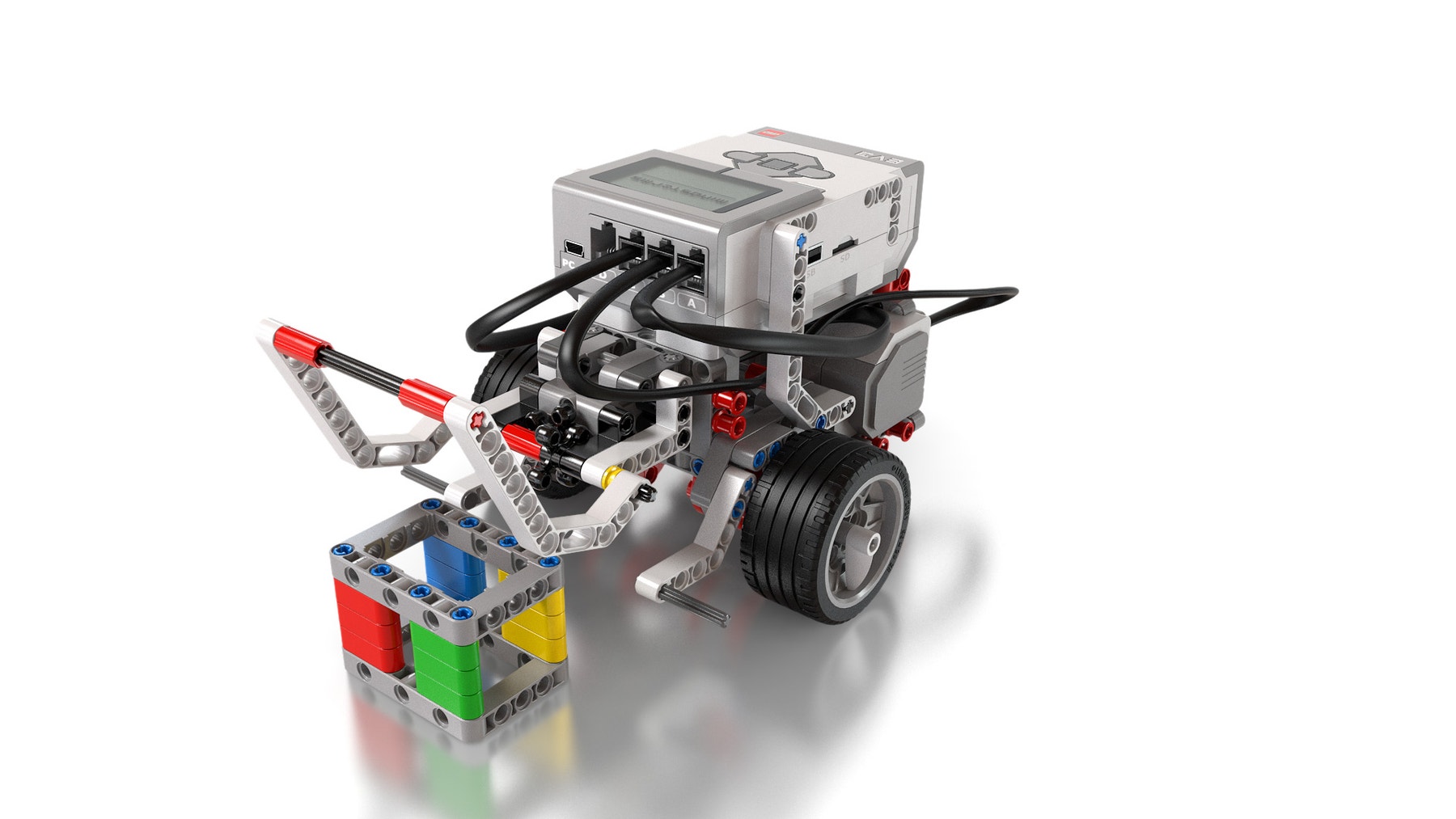
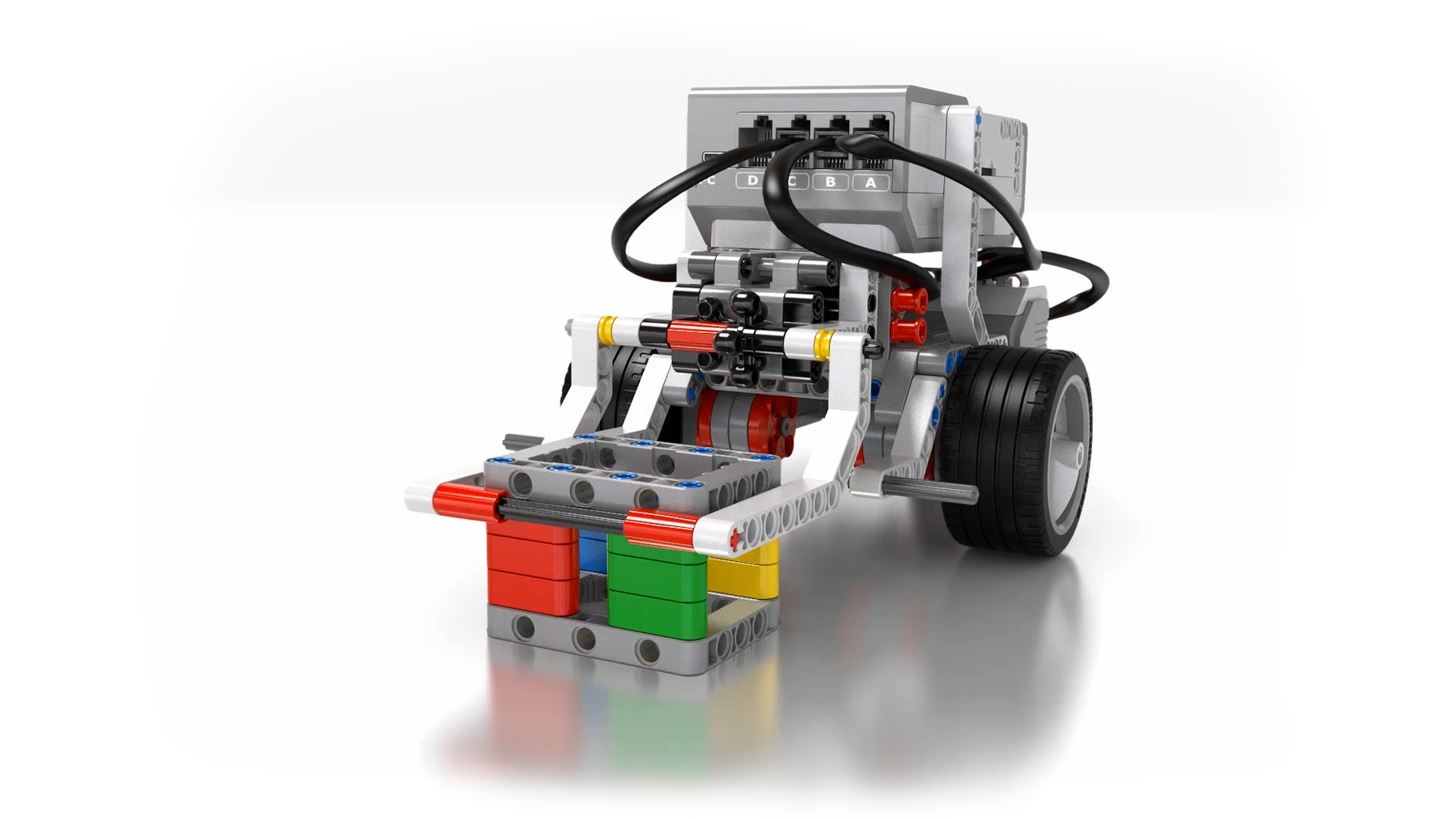
Bouw de kubus en deze uitbreidingen.
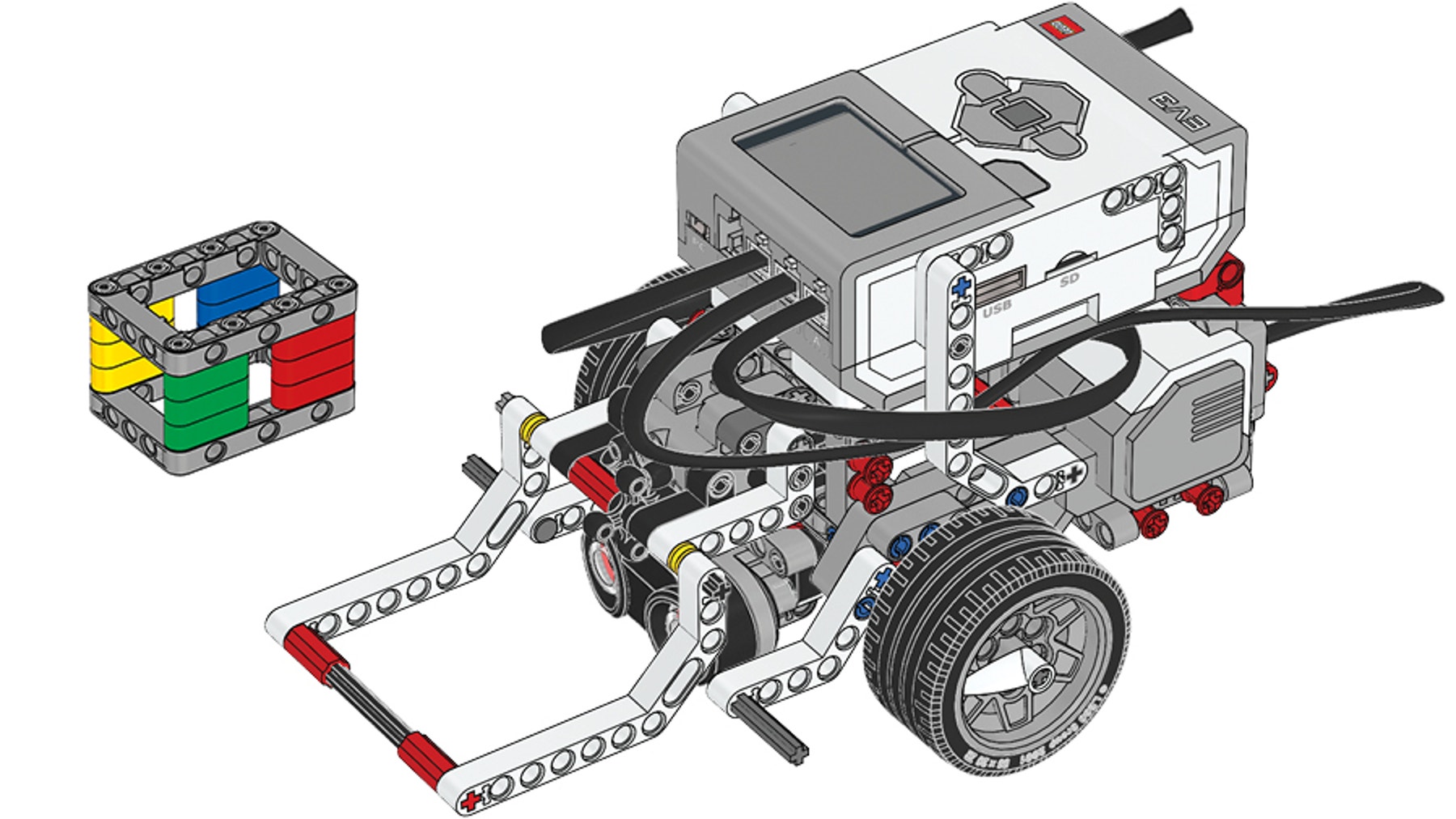
We gebruiken de medium motor om de kubus vast te pakken en weer los te laten. Daarnaast heb je de ultrasone sensor uit de vorige les nodig. Bouw de kubus en bouw vervolgens ook de uitbreidingen voor de rijbasis.
Probeer deze programmeerstacks een voor een uit.

Wat zie je? Plaats de kubus in verschillende posities.
Wat zijn de belangrijkste kenmerken en beperkingen van de medium motor?
Jouw beurt!
Gebruik blokken van de programmeerstacks die al klaar zijn op het programmeerveld om een programma te maken waarmee je ervoor kunt zorgen dat de rijbasis de kubus vastpakt, vooruitrijdt en een aantal rotaties maakt, de kubus loslaat en uiteindelijk omdraait en terugrijdt naar de startpositie.
Hoog tijd voor een uitdaging!

Programmeer de rijbasis zo dat hij de ultrasone sensor gebruikt om vlak bij de kubus te stoppen en vervolgens zijn arm laat zakken om de kubus op te pakken en mee naar de startpositie te nemen.
Hoe heb je het gedaan?
Wat heb je goed gedaan? Is er iets wat je beter had kunnen doen?
Het is gelukt! Je kunt objecten vastpakken en loslaten, en ze dus waar dan ook naartoe te verplaatsen.