Draaien aan de hand van sensor
In deze missie programmeer je de robot zodat deze met behulp van de Gyrosensor een preceis aantal graden ter plaatse draait.
Stap voor stap
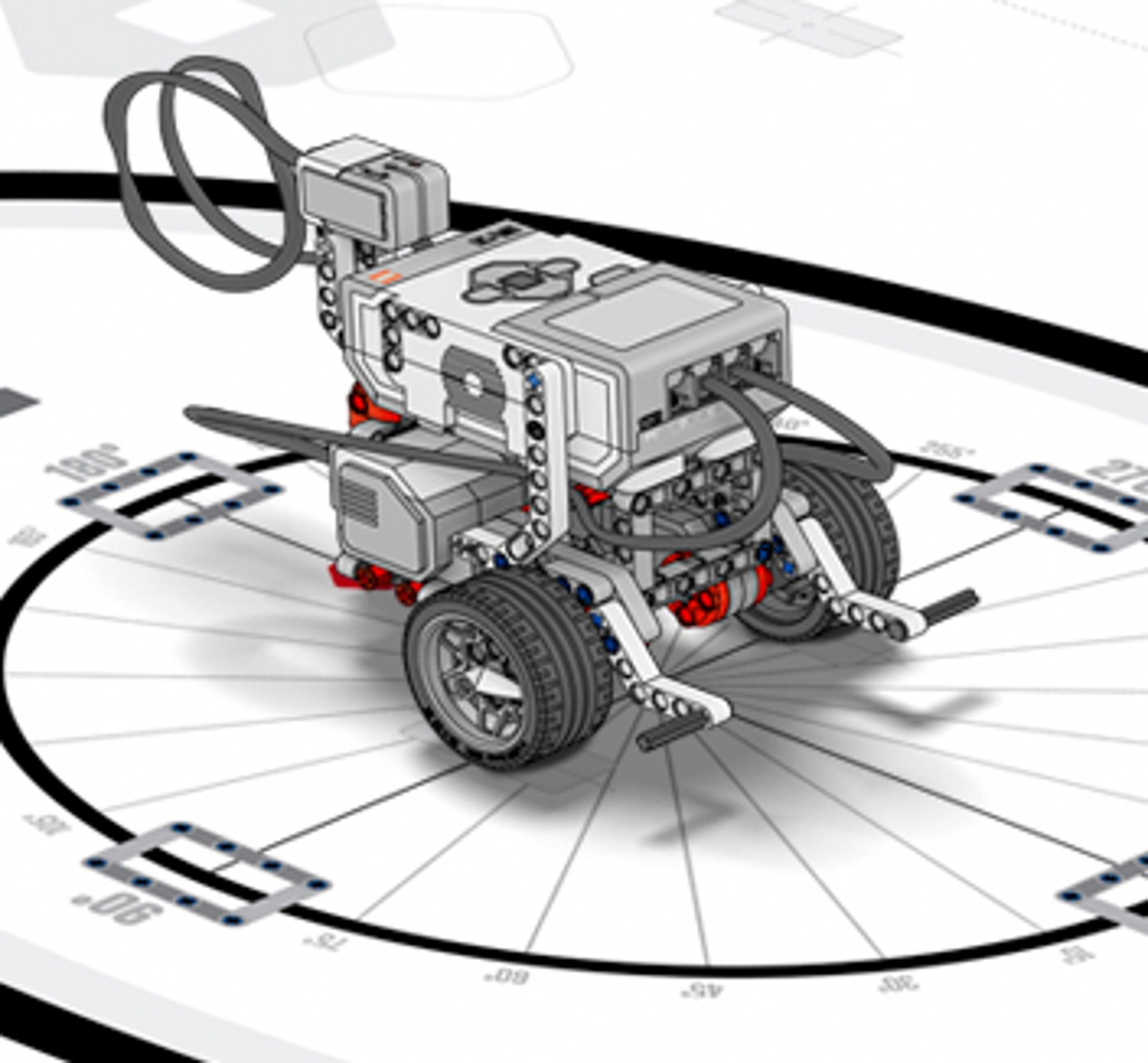
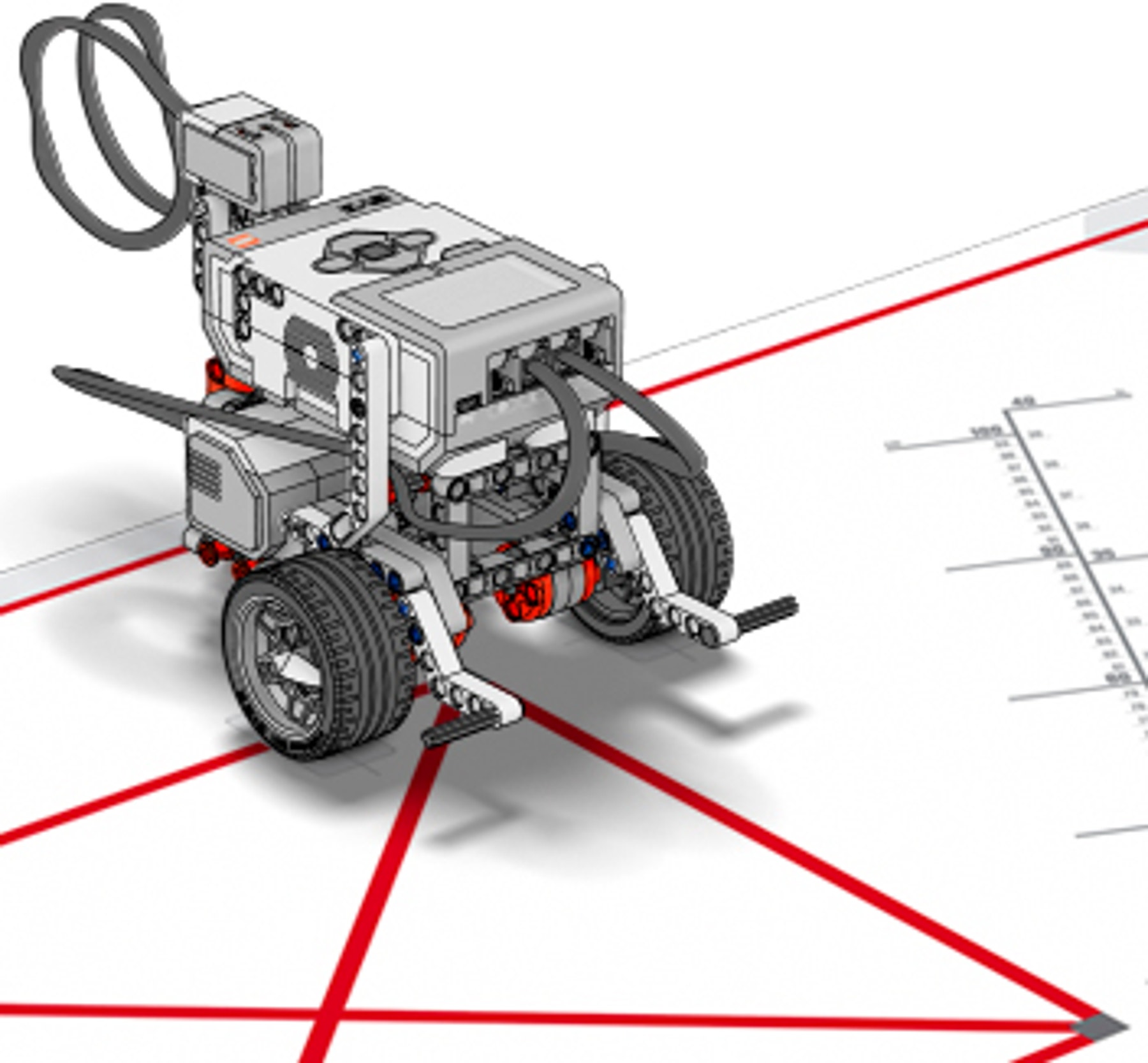
- Bouw de robot.
- Maak een programma.
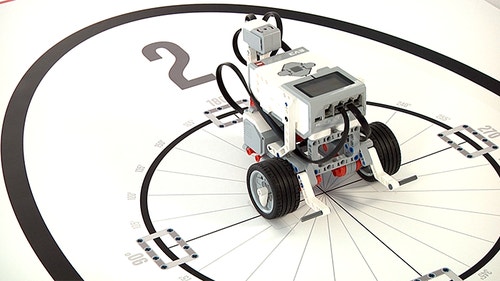
- Plaats de robot op positie 2 op mat 2 en voer het programma uit.
- Documenteer je bevindingen
- Leer meer over het gebruik van de Gyrosensor om de bewegingen van je robot te controleren.
Voordat je met deze missie start, kan het nuttig zijn de volgende Robot-onderwijzer-tutorials te doorlopen:
• Stoppen bij een hoek
• Herhaling
Tijdens deze missie verkennen de studenten de relatie tussen een sensorinvoer en het gedrag van de robot. De rijbasisrotaties worden geregeld door de Gyrosensor.
Observeer de studenten om na te gaan of ze
de correcte terminologie gebruiken;
de functie van de programmeerblokken herkennen;
goede manieren vinden om de draaihoek van de robot te testen;
inzien welke factoren de stopnauwkeurigheid beïnvloeden bij het gebruik van een Gyrosensor (sensortolerantie, motorvertraging en rotatiemoment).
Combineren
(5 Min.)
Draaien met behulp van een wiel is niet erg nauwkeurig. Als je je robot op een stoffige of gladde ondergrond laat draaien, is het mogelijk dat de hoek niet juist is. Met de Gyrosensor kun je veel nauwkeurigere bewegingen maken.
In deze missie programmeer je de robot zodat hij met behulp van de Gyrosensor een precies aantal graden ter plaatse draait.
Construeren
(20 Min.)
Bouw je robot
Klik op de onderstaande koppelingen om de bouwinstructies te openen. Bouw het model en ga dan terug naar dit project voor de volgende stappen. Als het model al is gebouwd, kun je deze stap overslaan.
BELANGRIJK:
Houd de Gyrosensor en de EV3-steen stabiel bij het aansluiten van de kabel en tijdens het opstarten van de EV3-steen.
Maak je programma
Maak het weergegeven programma opnieuw en download het naar je robot.

Samenvatting programma
Starten
Bewegen Tank - Vermogen B[10], Vermogen C[-10]
Wachten - Gyrosensor - Vergelijken Hoek - Type[3] (Groter dan of gelijk aan), Graden [90]
Tankbesturing - Uit
Probleemoplossing
De hoek moet aangepast worden (de waarde moet normaal lager liggen dan 90 graden).
Theorie
Wanneer je de Gyrosensor gebruikt, stemt de rotatiewaarde die in het sensorblok geschreven is overeen met de rotatie van de rijbasis. De nauwkeurigheid van de sensor is +/- 3 graden.
De motorvertraging en de vertraging die veroorzaakt wordt door het stoppen van het rotatiemoment kunnen de nauwkeurigheid beïnvloeden.
De batterijcapaciteit, de grootte van de wielen, de wrijving tussen de robot en de grond, en de afstand tussen de twee wielen kunnen de rotatienauwkeurigheid van de robot niet langer beïnvloeden.
Contempleren
(20 Min.)
Start je programma en observeer.
Plaats je robot op startpositie 2 op mat 2 en voer het programma uit.
Je bevindingen documenteren
• Beschrijf wat je robot deed bij elk programmaonderdeel:
Mijn robot . . .
• Schat de rotatiehoek van je robot:
Mijn robot draaide ongeveer . . .
• Leg het verschil uit tussen de rotatie van je robot met en zonder de Gyrosensor:
Met de Gyro . . .
Je kunt ook afbeeldingen, video’s, geluid of een webcamera gebruiken om je bevindingen te documenteren.
Aanschouw en pas aan
Schrijf je programma opnieuw zodat je robot als volgt ter plaatse draait:
- Ter plaatse 45 graden rechtsom draaien
- Ter plaatse 180 graden rechtsom draaien
- 360 graden naar rechts, gevolgd door een draai ter plaatse naar links van 360 graden
Hoeveel graden is je robot gedraaid in vergelijking met de instructies van het programma?
De robot draaide . . .
Taak
Draai de robot 45 graden rechtsom.

Oplossing - Samenvatting programma
Starten
Bewegen Tank - Vermogen B[10], Vermogen C[-10]
Wachten - Gyrosensor - Vergelijken Hoek - Type[3] (Groter dan of gelijk aan), Graden [45]
Tankbesturing - Uit
Probleemoplossing
De hoek moet aangepast worden (de waarde moet normaal lager liggen dan 45 graden).
Taak
Draai de robot 180 graden rechtsom.

Oplossing - Samenvatting programma
Starten
Bewegen Tank - Vermogen B[10], Vermogen C[-10]
Wachten - Gyrosensor - Vergelijken Hoek - Type[3] (Groter dan of gelijk aan), Graden [180]
Tankbesturing - Uit
Probleemoplossing
De hoek moet aangepast worden (de waarde moet normaal lager liggen dan 180 graden).
Task
Turn your robot clockwise for 360 degrees, followed by a counterclockwise point turn for 360 degrees.

Oplossing - Samenvatting programma
Starten
Bewegen Tank - Vermogen B[10], Vermogen C[-10]
Wachten - Gyrosensor - Vergelijken Hoek - Type[3] (Groter dan of gelijk aan), Graden [360]
Tankbesturing - Uit
Wachten - Seconden[2]
Bewegen Tank - Vermogen B[10], Vermogen C[-10]
Wachten - Gyrosensor - Vergelijken Hoek - Type[5] (Kleiner dan of gelijk aan), Graden [0]
Tankbesturing - Uit
Continueren
(15 Min.)
Ga verder met verkennen
Maak een nieuw programma met een Herhaling zodat je robot in een vierkant rijdt.
Wanneer je klaar bent om te gaan testen, plaats je de robot op startpositie 4 op leermat 1.

Oplossing - Samenvatting programma
Starten
Herhaling - Teller[4]
Richting veranderen - Graden[682], Vermogen[30]
Wachten - Tijd[1 s]
Tankbesturing - Aan, Vermogen B[10], Vermogen C[-10]
Wachten - Gyrosensor - Wijzig Hoek – Richting[0] (Vergroten), Graden [85]
Tankbesturing - Uit
Wachten - Tijd[1 s]
Probleemoplossing
De hoek moet aangepast worden (de waarde moet normaal lager liggen dan 90 graden).
Leg uit waarvoor een Herhaling gebruikt kan worden:
Ik kan een Herhaling gebruiken om . . .
Optioneel
1.Maak een nieuw programma om je robot in een driehoek te laten rijden. Wanneer je klaar bent om te gaan testen, plaats je de robot op startpositie 4 op mat 1.
2.Maak een programma om je robot in andere figuren te laten rijden.

Je kunt nu de Gyrosensor gebruiken om de robot te laten draaien. Goed gedaan!
Ondersteuning voor de leraar
Leerdoelstellingen:
Wetenschap en Technisch ontwerpen
• patronen
• oorzaak en gevolg: Mechanisme en verklaring
Wiskunde
• Wiskundige en in het dagelijks leven voorkomende problemen met hoekmeting, oppervlakte en volume oplossen.
• Regelmatigheid in herhaalde redeneringen nastreven en uitdrukken.
Robotica
• de bewegingen van de robot controleren met behulp van de Gyrosensor
• het verschil begrijpen tussen programmeren aan de hand van outputs en aan de hand van sensoren
• voordelen en beperkingen van sensoren
LEGO MINDSTORMS EV3 coreset
EV3 Lab of EV3 Programmeren
EV3 ruimte-uitdagingsset